Группа учёных Пенсильванского университета разработала систему DrEureka, предназначенную для обучения роботов с использованием больших языковых моделей искусственного интеллекта вроде OpenAI GPT-4. Как оказалось, это более эффективный способ, чем последовательность заданий в реальном мире, но он требует особого внимания со стороны человека из-за особенностей «мышления» ИИ.
Источник изображения: eureka-research.github.io
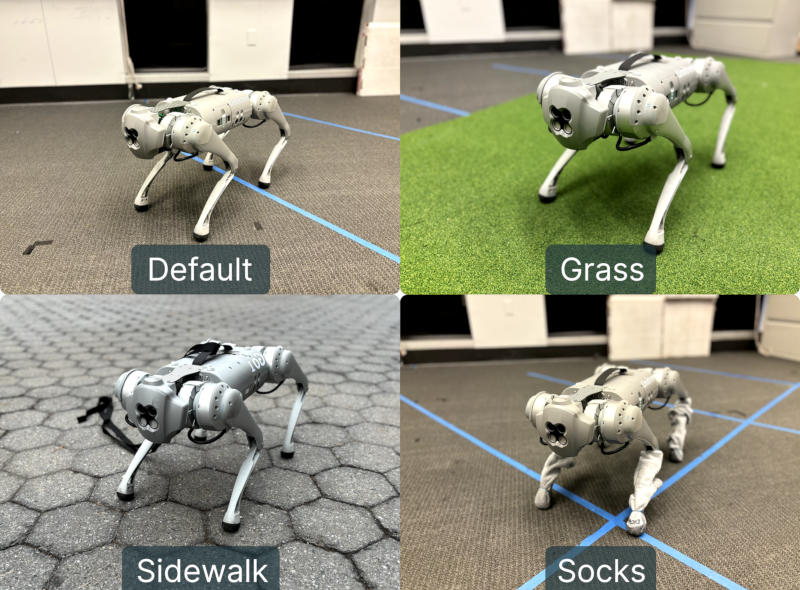
Платформа DrEureka (Domain Randomization Eureka) подтвердила свою работоспособность на примере робота Unitree Go1 — четвероногой машины с открытым исходным кодом. Она предполагает обучение робота в симулированной среде, используя рандомизацию основных переменных: показатели трения, массы, демпфирования, смещения центра тяжести и других параметров. На основе нескольких пользовательских запросов ИИ сгенерировал код, описывающий систему вознаграждений и штрафов для обучения робота в виртуальной среде. По итогам каждой симуляции ИИ анализирует, насколько хорошо виртуальный робот справился с очередной задачей, и как её выполнение можно улучшить. Важно, что нейросеть способна быстро генерировать сценарии в больших объёмах и запускать их выполнение одновременно.
ИИ создаёт задачи с максимальными и минимальными значениями параметров на точках отказа или поломки механизма, достижение или превышение которых влечёт снижение балла за прохождение учебного сценария. Авторы исследования отмечают, что для корректного написания кода ИИ требуются дополнительные инструкции по безопасности, в противном случае нейросеть при моделировании начинает «жульничать» в стремлении к максимальной производительности, что в реальном мире может привести к перегреву двигателей или повреждению конечностей робота. В одном из таких неестественных сценариев виртуальный робот «обнаружил» что способен передвигаться быстрее, если отключит одну из ног и начнёт передвигаться на трёх.
Исследователи поручили ИИ соблюдать особую осторожность с учётом того, что обученный робот будет проходить испытания и реальном мире, поэтому нейросеть создала дополнительные функции безопасности для таких аспектов как плавность движений, горизонтальная ориентация и высота положения туловища, а также учёт величины крутящего момента для электродвигателей — он не должен превышать заданных значений. В результате система DrEureka справилась с обучением робота лучше, чем человек: машина показала 34-процентный прирост в скорости движения и 20-процентное увеличение расстояния, преодолеваемого по пересечённой местности. Такой результат исследователи объяснили разницей в подходах. При обучении задаче человек разбивает её на несколько этапов и находит решение по каждому из них, тогда как GPT проводит обучение всему сразу, и на это человек явно не способен.
В результате система DrEureka позволила перейти от симуляции напрямую к работе в реальном мире. Авторы проекта утверждают, что могли бы дополнительно повысить эффективность работы платформы, если бы сумели предоставить ИИ обратную связь из реального мира — для этого нейросети потребовалось бы изучать видеозаписи испытаний, не ограничиваясь анализом ошибок в системных журналах робота. Среднему человеку требуются до 1,5 лет, чтобы научиться ходить, и лишь немногие способны передвигаться верхом на мяче для йоги. Обученный DrEureka робот эффективно справляется и с этой задачей.