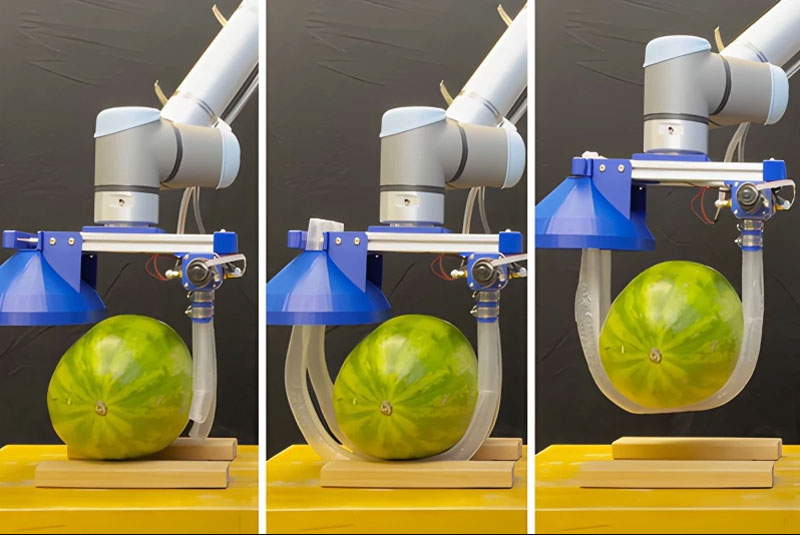
Инженеры из MIT и Стэнфорда разработали роботизированный захват, вдохновлённый ростом лиан или виноградной лозы. Устройство представляет собой пневматические трубки, которые под давлением воздуха «растут» из основания на роботизированной руке, проникают под объект или охватывают его, а затем смыкаются с другой стороны, образуя замкнутую петлю. Захват получается одновременно крепким и нежным, чему найдётся множество применений.
Источник изображения: MIT
Ключевой прорыв разработки заключается в умении захвата самостоятельно замыкать петлю, что сочетает преимущества открытых (для позиционирования) и закрытых (для надёжного захвата) видов манипуляторов. Гибкие лианоподобные захваты в прошлом уже демонстрировались, тогда как простая и надёжная их фиксация предложена впервые, о чём учёные сообщили в свежем выпуске журнала Science Advances.
Робо-захват демонстрирует высокую универсальность при контакте с объектами различной формы и массы. Во время испытаний он успешно поднимал хрупкие предметы, такие как стеклянная ваза, тяжёлые и неудобные, например арбуз или связку металлических прутьев, а также объекты в узком и неудобном для оперирования захватами пространстве. Особо впечатляющей оказалась способность аккуратно поднимать человеческие тела (в видео на 07:30), что заключалось в проталкивании трубок под телом пациента с максимальным для него комфортом.
Именно работа с пациентами ставится разработчиками во главу угла при проектировании подобных захватов. Это направление рассматривается как основное применение лианоподобных манипуляторов. Постоянное обслуживание пожилых и лежачих больных — одна из самых тяжёлых задач ухода за ними. Подобные роботы способны снять с персонала значительную физическую нагрузку, одновременно повысив комфорт пациентов: предложенные мягкие захваты удерживают тело человека надёжно и бережно.