Исследователи из Университета Нового Южного Уэльса (UNSW) разработали экспериментальный электродвигатель принципиально нового типа, у которого отсутствуют привычные катушки и магниты в статоре и на роторе. Источником механического вращения для двигателя служит капля жидкого металла в солевом растворе. Конструкция двигателя получается максимально простой и без механических передач, что делает его интересным для мягкой робототехники и медицины.

Источник изображений: UNSW
В основе физики процесса лежат электрогидродинамические эффекты. Они возникают на границе жидкого металла и электролита при подаче электрического напряжения. Напряжение на электродах создаёт вокруг капли неоднородное электромагнитное поле, которое приводит в движение поверхность капли: неравномерность распределения зарядов по поверхности изменяет силу поверхностного натяжения и вызывает движение оболочки капли.
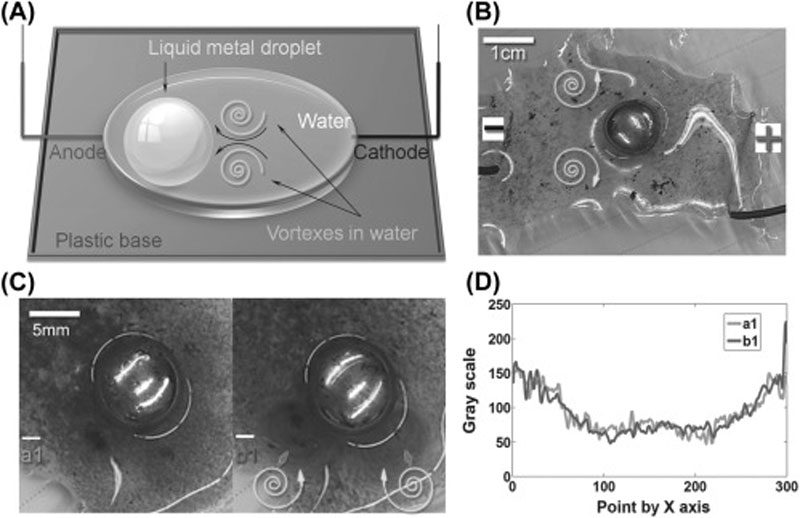
Размеры капли могут быть достаточно большими, от чего зависит создаваемая ею сила потоков электролита. Движение поверхности капли увлекает за собой жидкий электролит, создавая в среде потоки жидкости. Эти потоки, в свою очередь, направляются на нечто вроде мельничного колеса на валу электродвигателя. Они толкают лопасти колеса и заставляют вращаться вал. Вся двигательная система представлена камерой с солёной жидкостью, внутри которой происходит возбуждение и направление потоков жидкости на лопасти, закреплённые на валу. Капля жидкого металла относительно свободно плавает в своей части камеры. Из всей механики — только один вал с лопастями. Камера и сам двигатель могут быть мягкими и растягивающимися.
Ключевым физическим механизмом работы двигателя является эффект Маренгони — движение жидкости, вызванное градиентом поверхностного натяжения. Возникающие вихревые потоки передают импульс окружающему электролиту, формируя устойчивое круговое течение. Это течение, в свою очередь, воздействует на лопасти ротора и создаёт крутящий момент, приводящий его во вращение. Экспериментально показано, что такая система способна достигать скоростей порядка нескольких сотен оборотов в минуту (320 об/мин в эксперименте), что является высоким показателем для микродвигателей без магнитных компонентов.
Практическая значимость разработки заключается в возможности создания компактных и гибких приводов практически без износа, особенно перспективных для мягкой робототехники, систем формирования микропотоков и биомедицинских устройств. Отсутствие магнитов и твёрдого ротора снижает трение и упрощает миниатюризацию, однако технология пока остаётся экспериментальной и характеризуется ограниченным КПД, а также зависимостью от химического состава среды. Тем не менее предложенный принцип демонстрирует новое направление в проектировании двигателей, основанных на управляемой динамике жидких металлов.