⇡#«Это ещё не конец!» или Марсианская авиация в разреженной атмосфере
Когда 19 апреля 2021 года вертолет совершил свой первый полет в разреженной атмосфере, его создатели из научно-технической группы Mars-2020 вряд ли ставили на такой успех. Изначальный план был предельно скромным: всего пять полетов длительностью до 90 секунд каждый на высоте до 5 метров. Расчетный ресурс — 30 марсианских дней (солов). Главная цель? Демонстрация самой возможности. Чистая технология. Если бы аппарат просто взлетел и произвел посадку без повреждений, он уже выполнил бы свою задачу — доказал, что летать на Марсе возможно. Несмотря на разреженность атмосферы и пессимизм скептиков.
Плотность атмосферы Красной планеты составляет менее 1% от земной. Чтобы вертолет удержался в этой разреженной среде, несущий винт должен вращаться с очень высокой частотой — от 2 400 до 2 530 оборотов в минуту. Это на порядок выше, чем у земных вертолетов. Прибавьте к этому жесткие весовые лимиты, и вы поймете, насколько сложной была задача. Масса аппарата — всего 1800 граммов. И в эти граммы нужно было втиснуть всё: от электродвигателей до системы автономной навигации.
Планы были не просто выполнены, их перевыполнили с лихвой. За три года работы Ingenuity совершил 72 полета. 72 взлета и 72 посадки (из которых 71 была штатной, мягкой). Общий налёт составил более 128 минут. Суммарная дальность — примерно 17 км. Максимальная высота — 24 метра.
К сожалению, в последнем полете произошла авария: лопасти несущих винтов разрушились в результате соприкосновения с грунтом и дальнейшие полеты стали невозможны. Но оказалось, что даже это не финал!
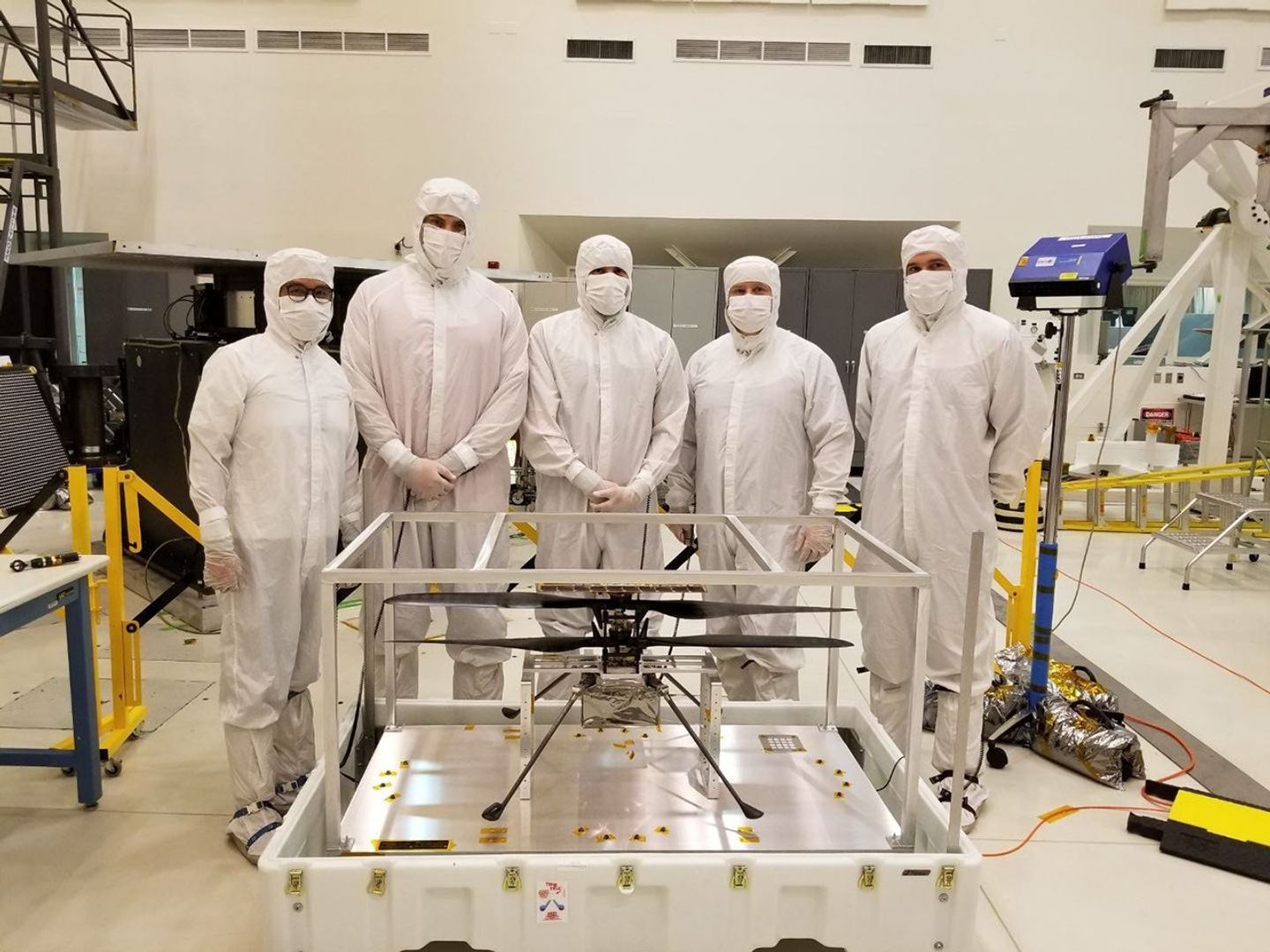
Представители проекта Mars-2020 позируют с марсианским вертолётом. Снимок был сделан 30 июля 2019 года в цехе сборки космических аппаратов JPL в Пасадене, штат Калифорния. Фото NASA
⇡#Автономный архив «Холмов Валинора»
По состоянию на сегодня вертолет замер на вечной стоянке в кратере Езеро, на площадке «Холмы Валинора» (Valinor Hills). Его активная летная программа завершена, но бортовая аппаратура полностью уцелела. Это позволило инженерам превратить Ingenuity в стационарную «метеостанцию» вообще без метеоприборов.
Чтобы собирать данные о погоде, специалисты задействовали побочные параметры: датчики температуры на платах вычисляют тепловой режим атмосферы по скорости остывания корпуса, амперметр солнечной батареи оценивает запыленность неба по падению зарядного тока, а цветная камера RTE фиксирует направление марсианского ветра по перемещению песчинок под лапами аппарата.
Раньше вертолет передавал эту информацию на Землю через марсоход Perseverance, но сейчас ровер уехал на 3 км и канал связи полностью отсутствует. У самого дрона нет дальней антенны, а из-за ледяных ночей его аккумуляторы полностью разряжаются, сбрасывая системные часы. Чтобы обойти эту проблему, инженеры перед расформированием миссии поместили в автозагрузку Linux специальный бессрочный скрипт.
Теперь каждое утро, как только солнечная батарея дает ток, процессор Snapdragon 801 запускает таймер Uptime с нуля, вслепую делает один снимок поверхности, собирает показания термопар, сохраняет их во Flash-память и тушит систему до следующего сола. Этот изолированный архив рассчитан на 20 лет работы и будет ждать будущую марсианскую экспедицию. Специалисты NASA надеются: эти данные пригодятся. Когда-нибудь люди или роботы вернутся в этот район и заберут архив марсианской погоды за десятилетия.
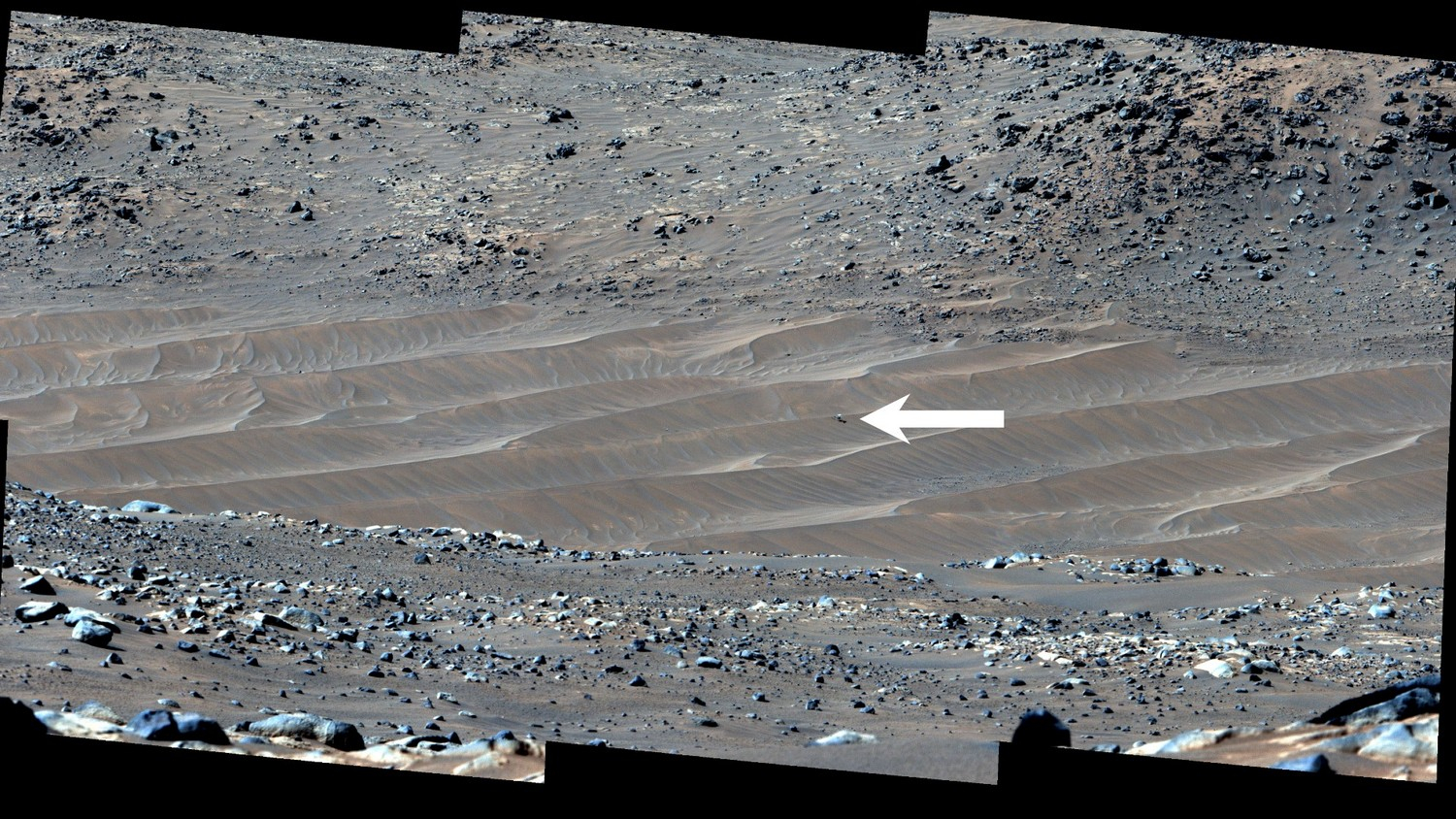
Марсоход Perseverance сделал этот снимок, на котором запечатлен марсианский вертолет на месте последней посадки 4 февраля 2024 года. Фото NASA/JPL-Caltech/ASU/MSSS
Сейчас, спустя пять лет, программа исследований кажется триумфом. Но в начале проекта Mars-2020 в маленький аппарат верили единицы. Ввиду использования серийных коммерческих компонентов (COTS) внутри вертолета стоят процессор Qualcomm Snapdragon 801 (знакомый землянам по флагманским смартфонам 2014 года вроде Samsung Galaxy S5) под управлением операционной системы Linux и литий-ионный аккумулятор, собранный из шести бытовых высокотоковых элементов Sony формата 18650 (которые на Земле массово применяются, например, в мощных шуруповертах).
Кто-то сомневался, что бытовая электроника выживет в экстремальных условиях Марса, а кто-то считал Ingenuity пустой тратой времени. Деньги отнимаются от «настоящей» науки! Научный сотрудник проекта Кеннет Фарли прямо заявлял: «Я лично был против этого. 30 дней на демонстрацию технологии не приведут к научным целям». Он был не одинок, многим казалось, что это просто дорогая игрушка.
Бюджеты марсианских экспедиций — это миллиарды долларов. На Ingenuity выделили 85 миллионов, что составляет менее 3 % от стоимости всей программы Mars 2020. Это на четверть меньше бюджета фильма «Марсианин». Но научно-техническая группа, давшая вертолету неофициальное имя «Джинни», делала всё, чтобы доказать право на жизнь этой технической концепции.
Прежде чем отправиться на Марс, вертолет прошел через цикл наземных испытаний с имитацией марсианской среды в огромной вакуумной камере, заполненной углекислым газом. Давление — около 0,6 % от земного, что соответствует условиям земной атмосферы на высоте около 34 километров. Гравитацию обманывали тросовой системой подвеса. Она непрерывно тянула аппарат вверх и компенсировала 62 % его веса. Оставались «честные» марсианские 38 %.
Наконец, внутри этой же камеры была построена специализированная «ветровая стена», состоящая из почти 900 индивидуально управляемых… компьютерных вентиляторов! Они создавали порывы воздуха, похожие на марсианские бури.
Специалисты проверяли всё. От прочности композитных лопастей из углеволокна до логики навигации. Вертолет должен был летать автономно. Радиосигнал с Земли идет с задержкой в несколько минут, поэтому прямое дистанционное управление — невозможно. Вместо него использовались заранее заложенные полетные программы от JPL. А дальше бортовые системы сами выполняли маневры в реальном времени под управлением бортового компьютера.

Первый полет прототипа марсианского вертолета прошел 31 мая 2016 года в камере-имитаторе в Южной Калифорнии. Фото NASA
⇡#Первый полет и новая профессия
30 июля 2020 года ракета-носитель Atlas V 541 отправила к Марсу ровер Perseverance с закрепленным на нем вертолетом. 18 февраля 2021 года марсоход совершил посадку в кратере Езеро, но «Джинни» не сразу «вдохнул» марсианский воздух. Больше месяца он находился на днище ровера под защитным кожухом. Последний сбросили 21 марта, и лишь 3 апреля 2021 года — на 43-й сол миссии — вертолет бережно опустили на грунт.
Отстыковавшись от «матки», крошечный аппарат наконец остался с Красной планетой один на один. Впереди были две недели экстремальных тестов и проверок перед главным прыжком в историю. В течение этих дней специалисты Лаборатории реактивного движения тестировали двигатели, камеры и управляющий компьютер.
И вот 19 апреля 2021 года. Центр управления в Лаборатории реактивного движения замер. Сигнал шел шесть минут. Аппарат должен был взлететь, зависнуть на 3 метрах, повернуться и сесть. Полная автономия. Лопасти раскрутились до максимума. Экран показал успешный прием телеметрии. Всего через 120 лет после братьев Райт человек полетел на другой планете. В зале аплодировали стоя.
За первый месяц испытаний «Джинни» осуществил пять запланированных полетов, полностью выполнив первоначальную программу. После триумфального завершения тестовой программы на тридцатый сол, научно-техническая группа JPL столкнулась с реальностью: батареи держали заряд, системы работали стабильно, а сам аппарат был готов к серьезной долгосрочной работе.
Именно тогда возникла идея превратить демонстратор технологий в полноценного воздушного разведчика для марсохода Perseverance. Вертолет мог летать впереди ровера, осуществлять рекогносцировку маршрутов, искать безопасные пути движения и исследовать геологические объекты в труднодоступных зонах — на дюнах и в кратерах, куда марсоход не мог добраться физически.
Сказано — сделано. Однако это был настоящий вызов. Никто не давал гарантий, что после пяти полетов удача не отвернется от аппарата. Авария могла случиться в шестом, седьмом — в любом последующем вылете. «Нас как бы бросили в глубокий бассейн. У нас не было никаких технических процедур или планов, разработанных для такого случая», — вспоминал позже один из участников проекта. До этого каждый шаг планировался месяцами. Все маневры моделировались на Земле в аэродинамической трубе и проверялись в программных симуляторах. Но теперь «Джинни» предстояло работать в паре с ровером. Это был прыжок в полную неизвестность.
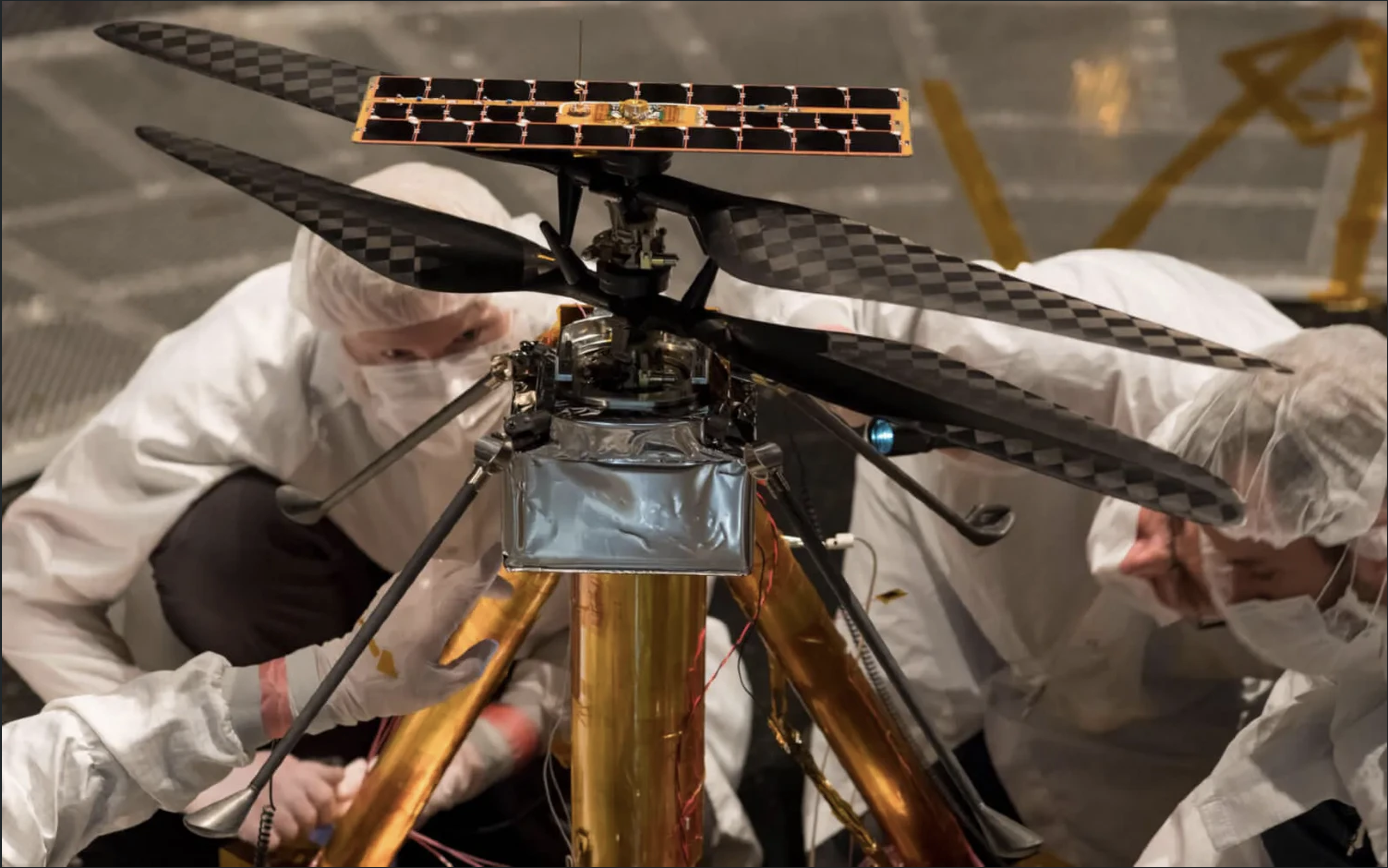
Представители программы Mars Helicopter осматривают летную модель (реальный аппарат, который отправился на Красную планету) в вакуумной камере диаметром 7,62 м в Лаборатории реактивного движения NASA в Пасадене, 1 февраля 2019 года. Фото NASA
⇡#Зрение оптической мыши и цифровое головокружение
Напомним: управлять марсианским вертолетом дистанционно невозможно. Задержка сигнала достигает шести минут. «Джинни» за один раз может держаться в воздухе всего пару минут. Поэтому аппарат обязан летать автономно. И здесь ключевым фактором становится навигация. Спутниковых систем на Марсе нет. Пришлось полагаться на оптику.
В системе работают две камеры: цветной фотодатчик Sony IMX214 с разрешением 4208 × 3120 пикселей, смотрящий вперед под углом 22 градуса к горизонту, и видеокамера OmniVision, направленная строго вниз. Последняя и является навигационной. Она построена на монохромном сенсоре OV7251 с разрешением 640 × 480 пикселей и широкоугольным объективом с полем зрения 133 на 100 градусов. Камера снимает 30 черно-белых кадров в секунду.
Бортовой компьютер анализирует изображение и определяет особенности поверхности. В чем-то этот принцип напоминает работу оптической компьютерной мыши. Она не знает своего точного положения на коврике. Но как только ее перемещают, сенсоры «ловят» движение элементов поверхности и делают вывод о направлении. «Джинни» делал то же самое. Он смотрел на поверхность, выделял камни, неровности и тени. И между кадрами бортовой алгоритм фиксировал: этот камень сместился вот так. На основе этого вычислялось перемещение и его скорость.
Метод простой, но не лишенный изъянов. Во время шестого полета, когда вертолет впервые перемещался на новую площадку, возник сбой. Навигационная аномалия. На 54-й секунде система потеряла один навигационный кадр, из-за чего последующие изображения поступали в бортовой компьютер с ошибочными временными метками. Тайминги поплыли, а визуальные данные разошлись с показаниями инерциального измерительного блока. Камера давала управляющему компьютеру устаревшую информацию.
Ситуация стала критической. Аппарат уже находится в правильном месте, но компьютер «считает», что он отстает, и толкает его вперед. Система перебарщивает, наклоняется слишком сильно, а затем вынуждена «отыгрывать» в другую сторону. Возникла положительная обратная связь. Началась раскачка по тангажу и крену с амплитудой более 20 градусов. Аппарат выжил благодаря запасу устойчивости системы управления. При посадке алгоритм, согласно штатной программе, полностью отключил навигационную камеру. Это позволило вертолету прекратить колебания, выровнять корпус и совершить успешную посадку. Позже на Земле специалисты JPL нашли ошибку и поставили патч. Следующие полеты, вплоть до девятнадцатого, проходили штатно.
Первая аэрофотография Марса, сделанная 23 апреля 2021 года с вертолета. Фото NASA/JPL
⇡#Влияние пылевых бурь и низких температур
Но Марс не прощает самоуспокоения. Подготовка к девятнадцатому полету шла по графику, но накануне пришло сообщение: в районе кратера Езеро назревает региональная пылевая буря. Полет быстро отменили. Решили переждать ненастье. Порывы ветра достигали 20 м/с. Из-за атмосферных условий задержка вылета составила более месяца. Когда все стихло, специалисты Лаборатории реактивного движения попытались связаться с «Джинни». Аппарат был в порядке, он не опрокинулся.
Однако не всё было хорошо, марсианская пыль создала две большие проблемы. Первая — солнечная батарея. Элементы покрылись слоем рыжего налета, вследствие чего потеряли 18% мощности. Вторая проблема — механика. Пыль осела на тонких механизмах. Когда начали проверять сервоприводы автомата перекоса, их фактически заклинило. Физическое сопротивление оказалось сильнее электромоторов. Первая попытка девятнадцатого полета была прервана.
Специалисты JPL предвидели обе эти проблемы еще на этапе проектирования, но ни времени, ни бюджета на их устранение не было. Пришлось искать обходные пути. Со снижением мощности солнечных батарей смирились, решив сокращать длительность пребывания в воздухе. Вторую проблему решали упорством. Инженеры многократно включали и «раскачивали» сервоприводы на стоянке. Снова и снова. До тех пор, пока они не очистились от пыли. В итоге вертолет смог продолжать программу исследований.
Но и это не всё. Для Марса характерны огромные перепады температур. Представьте: если бы вы стояли на экваторе в полдень, температура у ваших ног могла бы составлять +23 °С, а у головы — уже ноль. Ситуация усугублялась тем, что во время экспедиции начиналась зима. Красная планета удалялась от Солнца. Ночью становилось еще холоднее. Это стало угрозой для электроники. Многие ключевые компоненты вертолета припаяны вручную. Дикие перепады температуры могут привести к поломке паяных соединений.
Аккумуляторная батарея использует органический электролит. Если из-за критического падения температуры произойдет его замерзание, химические источники тока полностью деградируют. Какой выход? Держать аккумулятор в теплоизолированном коробе и часть энергии тратить на его обогрев. Иногда на сам полет тратилось только 25-30% заряда, тогда как остальное потребляла система подогрева. И чем холоднее становилось, тем больше работы было для системы подогрева. Если она не справляется и батареи слишком сильно охлаждаются, они теряют эффективность. Меньше энергии на обогрев — еще более сильное охлаждение. Замкнутый круг, ведущий к понятному финалу. Вопрос был в том, насколько хватит ресурсов.
Анимация, созданная на основе изображений самого длинного и быстрого полета вертолета на Марсе. 18 апреля 2022 года аппарат преодолел 704 метра со скоростью 5,5 м/с. Фото NASA/JPL.
⇡#Сброс системного времени и отказ инклинометра
Утром 3 мая 2022 года группа управления Лаборатории реактивного движения не смогла выйти на связь с «Джинни». Попытки радиоопроса аппарата не давали результата. Казалось, программа исследований стоимостью в 85 миллионов долларов подошла к концу. Но научно-техническая группа не собиралась опускать руки, и вскоре рабочая гипотеза была сформулирована.
Всё дело в бортовом таймере пробуждения. Проснувшись, вертолет ожидает команд лишь 15 минут. Если за это время он не слышит сигналов, то снова переходит в спящий режим. Расчеты показали: из-за нехватки солнечного света аккумулятор разрядился в ноль, и обогревать электронику стало нечем, что привело к падению напряжения на шине питания и полному обнулению энергонезависимых системных часов.
Однако оставался шанс на восстановление. Когда солнце встает, батареи могут накопить достаточно тока для автоматического включения. Инженеры вычислили критическое окно: примерно 11:45 утра по марсианскому времени. Предыдущие попытки связи просто не попадали в этот узкий интервал. Начали передачу команд в расчетный час, и аппарат ожил.
Несмотря на то, что компоненты в герметичном теплоизолированном коробе рассчитаны на температуру не ниже -45 °С, они выдержали полную ночную заморозку. Железо устояло. Но не всё. В результате промерзания вышел из строя инклинометр — устройство, отвечающее за определение начального наклона аппарата перед взлетом. Без него запуск двигателей превращался в лотерею. Малейшее отклонение от курса — и «Джинни» мог врезаться в ближайшую скалу. Ситуация казалась патовой. Но тут на помощь пришла сама концепция аппарата.

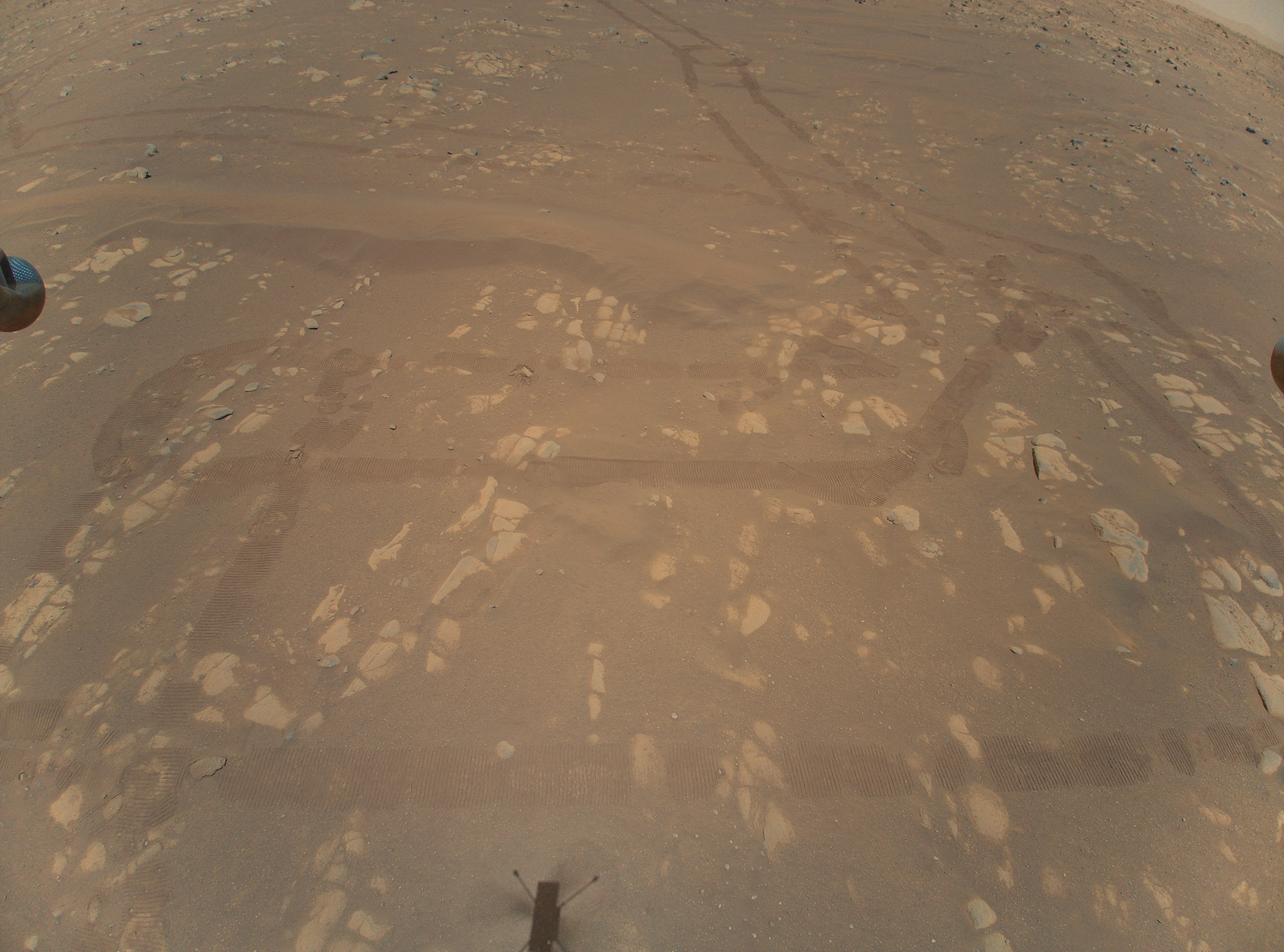
16 апреля 2024 года инженеры NASA успешно проверили эффективность программного патча, который сделал вертолет «метеостанцией на Марсе». Фото NASA/JPL
⇡#Смартфонный мозг на радиационном ветру
Вспомним: Ingenuity собран из деталей массового рынка. Его «сердце» — Qualcomm Snapdragon 801, некогда стоявший в смартфонах. В качестве инерциальных датчиков использовались две серийные микросхемы Bosch Sensortec BMI160, применяемые в фитнес-браслетах и бытовых квадрокоптерах. А внутри любого современного телефона есть акселерометры. Они измеряют ускорение. Если интегрировать эти данные в процессор, можно получить значения скорости и перемещения. Именно так ваш смартфон понимает, когда нужно повернуть экран или начать подсчет шагов.
Если объединить три акселерометра и три гироскопа, получается миниатюрная бесплатформенная инерциальная система (БИНС). Эти датчики стали спасением. Инженеры JPL перепрограммировали бортовой компьютер, заставив его использовать показания акселерометров БИНС вместо погибшего инклинометра для определения угла наклона на грунте перед стартом. Программный код заменил физическое устройство. «Нам повезло, что отказал именно тот прибор, который мы могли позволить себе потерять», — комментировали в лаборатории.
Но был нюанс. Компонентная база БИНС была бытового, а не космического класса. Это знаменовало уязвимость перед радиацией. Тонкая атмосфера Марса почти не задерживает космические лучи. Переключение одного бита в памяти в неподходящий момент — и аппарат сорвется в неконтролируемое пике. Однако предсказания пессимистов не сбылись. Оказалось, что компоненты «с полки» держатся куда лучше, чем ожидали в NASA.
Опыт позволил сделать важный вывод: для многих задач вовсе не обязательно тратить годы и миллионы на разработку радиационно стойких чипов с нуля. Иногда достаточно купить партию серийных процессоров, испытать их и выбрать самые стойкие. Путь к звездам стал дешевле.
«Джинни» успешно пережил марсианскую зиму. Он продолжил летать, работая уже на научную программу марсохода. В сороковом полете вертолет сделал уникальные снимки кратеров, куда Perseverance не мог заглянуть физически. Специалисты начали повышать ставки. Они проводили смелые аэродинамические тесты, нащупывая пределы возможностей машины.
Однако возникла новая преграда. Инженеры планировали увеличить предельную горизонтальную скорость аппарата до 10 м/с, но на малой высоте это приводило к слишком быстрому перемещению объектов в поле зрения навигационной камеры. Визуальный алгоритм одометрии просто не успевал обрабатывать поток кадров. Решение? Подняться выше. Если смотреть оттуда, из разреженного неба, картинка внизу меняется медленнее. В итоге с начальных 10 метров «Джинни» взлетел на рекордные 24 метра. Его скорость выросла с проектных 2 м/с до впечатляющих 10 м/с.

Perseverance сфотографировал Ingenuity на вершине песчаной дюны 24 февраля 2024 года. Одна лопасть винта лежит в 15 метрах к западу (слева). Фото NASA/JPL
Специалисты выжимали из аппарата максимум. Рекорды скорости, высоты и дальности падали один за другим. «Джинни» и Perseverance добрались до долины Неретвы — древней речной дельты в кратере Езеро. Вплоть до семьдесят первого полета всё шло по плану. Но удача — ресурс исчерпаемый. Вертолету предстояло последнее, самое опасное дело.
Нужно было пересечь зону песчаных дюн и добраться до области «Яркий ангел» (Bright Angel). Там планировалась встреча с марсоходом. «Джинни» поднялся в воздух. Но в процессе полета навигационная система ослепла. Безликие пески под фюзеляжем не давали зацепок для визуального алгоритма. Сбой. Резкая остановка. Жесткая посадка в дюнах.
Группа управления снова замерла. Связь установили — аппарат выжил. Код ошибки подтвердил опасения: камере не хватило ориентиров. Скалы кончились, начался песок. Навигация потеряла точку опоры. К счастью, видимых повреждений не было. В JPL приняли решение: рискнуть еще раз. Подняться, просканировать местность и тут же сесть. Это был ход ва-банк.
Увы, в семьдесят втором полете сценарий повторился с пугающей точностью. «Мы поднялись, сделали фото, а при спуске столкнулись с той же аномалией, что и в прошлый раз. Но теперь последствия стали фатальными». Когда марсоход наконец доехал до места крушения, стало понятно, что программе исследований конец. С ломанные лопасти не оставили шансов на новые полеты.
Первая в истории авиационная авария на другой планете потребовала полноценного расследования. На месте крушения среди рыжего песка обнаружили обломки. Анализ данных и снимков с ровера Perseverance расставил всё по своим местам. Удар о наклонную поверхность дюны был неизбежен. Именно касание грунта на высокой горизонтальной скорости вызвало катастрофический изгиб лопастей. Тонкий композит не выдержал. Произошло мгновенное разрушение в точках концентрации напряжений.
Специалисты JPL восстановили полную картину аварии. Когда «Джинни» жестко приземлился под углом, импульс передался через корпус. Причиной поломки стал не прямой удар лопастей о грунт, а запредельные изгибающие аэродинамические нагрузки. В момент касания склона дюны аппарат резко бросило по крену и тангажу. Из-за этого деформация быстро вращающихся лопастей превысила расчетные лимиты, и все четыре композитных элемента синхронно переломились в своей самой слабой точке — на расстоянии одной трети от законцовки. Слабым звеном оказалась сама механика, хотя причиной стала навигационная система, не рассчитанная на ослепление над безликим песком.
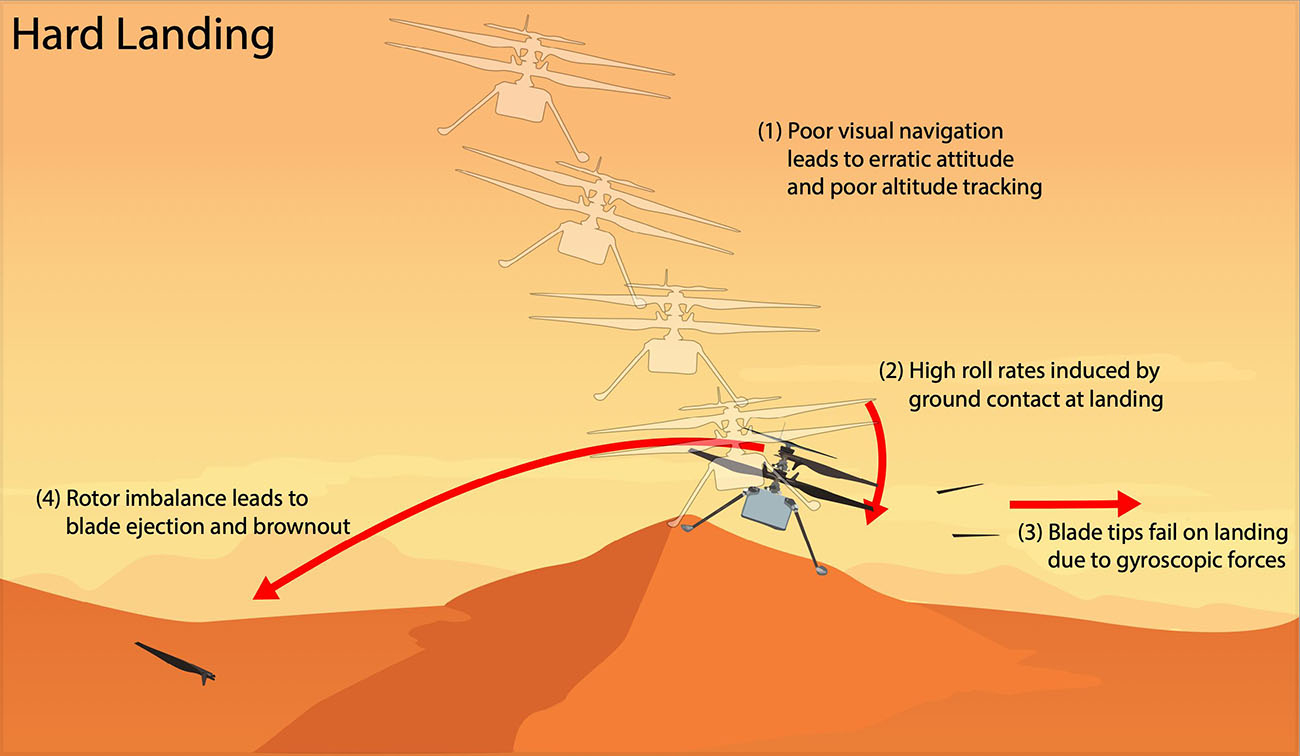
Схема жесткой посадки вертолета «Джинни». Графика NASA
⇡#Гексакоптеры приходят на смену
Но этот урок не прошел даром. Инженеры уже разработали новую конструкцию для будущего марсианского флота. Лопасть нового поколения только внешне напоминает деталь от Ingenuity. Внутри — иная, усиленная структура. Теперь она способна выдержать изгибающие нагрузки, возникающие при самых жестких посадках. Но главное изменение скрыто в самой схеме аппарата — на следующий вертолет поставят не два ротора, а шесть. Гексакоптер («Чоппер») — это совсем другой уровень надежности. Такая машина сможет поднимать не только собственный вес, но и серьезную научную нагрузку массой до 5 кг.
⇡#Сравнительные характеристики марсианских дронов
|
Характеристика |
Ingenuity («Джинни») |
Chopper (Mars Science Helicopter) |
|
Тип конструкции |
Соосный (2 винта) |
Гексакоптер (6 винтов) |
|
Масса аппарата |
1,8 кг |
~20–35 кг (в ~20 раз тяжелее) |
|
Масса полезной нагрузки |
0 кг (только камеры) |
от 2 до 5 кг (научные приборы) |
|
Дальность полета за 1 сол |
макс. 0,7 км |
до 3–5 км |
|
Продолжительность полета |
до 1,5–2 мин |
до 10 минут |
|
Канал связи |
через марсоход |
напрямую через орбитальный аппарат |
|
Текущий статус проекта |
программа завершена (2024) |
Гексакоптерная схема с шестью роторами выбрана не только для повышения грузоподъемности, но и для обеспечения избыточности: при отказе одного из двигателей аппарат сможет совершить аварийную посадку. В отличие от «Джинни», «Чоппер» сможет нести спектрометры и магнитометры для изучения состава почвы в труднодоступных местах. Для полета в разреженной среде лопасти нового поколения проектируются со специальным профилем для работы на околозвуковых скоростях (при высоких числах Маха).
Для «Чоппера» создано и новое радиооборудование. Оно легче и мощнее. Главное преимущество — автономность связи. Будущий вертолет сможет передавать данные на Землю напрямую, без помощи марсохода-посредника. Это превращает его в независимую исследовательскую платформу. Один полет позволит преодолеть 3 км за считаные минуты. То, на что у роверов уходят месяцы мучительного передвижения между камнями.
Предполагается, что в будущем платформа доставит на Марс целый рой вертолетов. Они смогут отделяться от носителя еще на этапе спуска в атмосфере, а затем — выполнять автономные программы в разных точках планеты. Это позволит детально обследовать поверхность Марса в масштабах, о которых раньше нельзя было и мечтать.
«Чоппер» и 36 лопастей: NASA планирует создать марсианский вертолет размером с внедорожник. Графика NASA
Под солнечной батареей Ingenuity прикреплен крошечный фрагмент ткани — квадратный сантиметр муслина с крыла «Флаера» братьев Райт. Фрагмент намотан вокруг кабеля и зафиксирован изоляционной лентой. От того первого полета в Китти-Хок до работы над кратером Езеро протянулась технологическая связь. Маленький беспилотный аппарат совершил революцию: он переписал учебники по планетологии и доказал саму возможность и ценность аэродинамических полетов в разреженной атмосфере других миров. Эта история показала, что использование серийных коммерческих компонентов при жестком расчете позволяет решать сложнейшие задачи в рамках ограниченного бюджета.
Сегодня, на месте вечной стоянки, Ingenuity продолжает функционировать в автономном режиме «капсулы времени». Каждое марсианское утро, как только солнечная панель дает рабочий ток, происходит холодный старт процессора Snapdragon 801. Бортовой компьютер вслепую запускает таймер Uptime с нуля, делает снимок подстилающей поверхности на цветную камеру RTE и фиксирует показания внутренних термопар на платах, сохраняя данные в Flash-память. Этот изолированный архив рассчитан на 20 лет работы. Когда будущие экспедиции вернутся в кратер Езеро, они смогут обнаружить вертолет и забрать этот хроникальный лог выживания электроники в марсианской среде.
Теперь мы знаем: небо Марса открыто!