⇡#Часть 1. Кинематографическое изящество против биомеханического уродства
Любой человек, впервые изучающий кадры лунной хроники миссий Apollo, испытывает обоснованное недоумение. Передвижение людей на экране не укладывается в рамки привычной земной логики. Вместо чёткого, размеренного шага первопроходцев зритель видит странные, хаотичные прыжки, постоянное балансирование корпусом, падения в пыль и неуклюжие попытки подняться на четвереньки.
Это зрелище настолько не вяжется с образом монументального исторического события, что у мыслящего наблюдателя закономерно возникает вопрос: не является ли этот прыгающий хаос плохой постановкой, снятой в голливудском павильоне? В качестве главного кандидата на роль режиссёра этой фальшивки традиционно называют Стэнли Кубрика, который за год до высадки Армстронга, в 1968 году, выпустил на экраны свой шедевр «2001: Космическая одиссея».
Однако детальное сравнение работы Кубрика с реальной лунной хроникой обнаруживает глубокий парадокс. Если бы лунная программа действительно снималась в Голливуде, она выглядела бы совершенно иначе — гораздо красивее, логичнее и понятнее для зрителя.
В «Космической одиссее» Кубрик предпринял грандиозную попытку смоделировать передвижение человека в условиях лунной гравитации. Для этого актеров подвешивали на специальных тросах и использовали замедленную съёмку. На выходе получилось визуально безупречное, эстетичное зрелище.
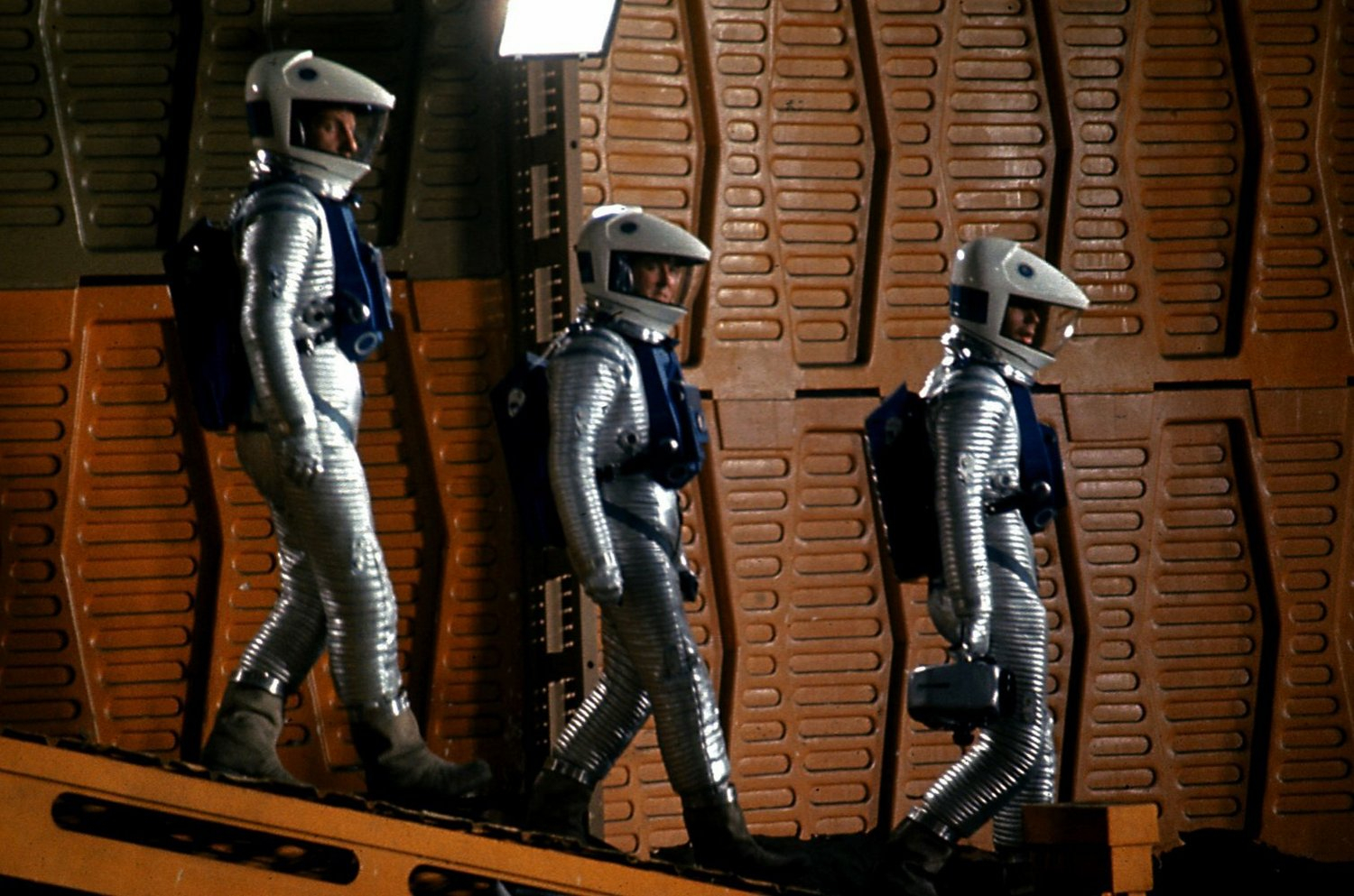
Кадр из научно-фантастического фильма Стэнли Кубрика «2001: Космическая одиссея», 1968 год. Актёры в скафандрах уверенно передвигаются по съёмочной площадке. Они демонстрируют идеальную координацию, сохраняя вертикальное положение тела. Кинематографическая модель выглядит безупречно, но не учитывает реальные трудности биомеханики на Луне. Фото: Warner Bros.
Астронавты в фильме Кубрика передвигаются так, как этого интуитивно ждет любой земной человек:
Кубрик создал идеальную картину для земного восприятия. Проблема заключалась в том, что его актёры физически оставались на Земле. Система тросов компенсировала лишь часть веса для снижения вертикального ускорения падения, но она не могла обмануть ни вестибулярный аппарат, ни проприоцепцию — внутреннее ощущение положения мышц, сухожилий и суставов в пространстве. Мозг человека на подсознательном уровне всегда стремится к удержанию вертикальной оси баланса, к симметрии фаз шага и к равномерному распределению усилий. Актёры Кубрика просто не могли идти иначе, потому что их нервная система работала в условиях земных автоматизмов и полной земной гравитации.
Когда год спустя реальные астронавты вышли на поверхность Луны, их движения полностью опровергли голливудские стандарты. Вместо эстетичной ходьбы Кубрика мир увидел асимметричный, ломаный гибрид шага и прыжка. В технических отчетах NASA этот способ передвижения назвали «лунным галопом» (lope). Пилоты постоянно переключались между ним, прыжками (hop), шагом-подскоком (skip/shuffle) и приставным шагом (side step) в зависимости от рельефа чужого мира.
Физика реального космоса оказалась контринтуитивной. Она полностью проигнорировала законы кинематографической красоты. Зритель видит на экране странные движения не потому, что это плохая имитация, а потому, что реальное сочетание свойств скафандра, изменённого веса (при огромной инерции) астронавта и скользкого грунта заставило человеческий мозг полностью сломать земные шаблоны движений. В Голливуде стремились бы оправдать ожидания зрителя и сделать шаг героев величественным и правильным. Реальность же оказалась уродливой, рваной и хаотичной — именно потому, что это был не сценарий, а живой процесс адаптации человека к чужой планете.

На фото пилот лунного модуля Apollo 11 Базз Олдрин во время высадки на Луну 20 июля 1969 года. Астронавт передвигается в полусогнутом положении из-за тяжелого ранца и ограничений скафандра. Его тело наклонено вперед, ноги совершают «рваные и хаотичные» движения. Фото NASA
⇡#Часть 2. Мозг против шестерёнок: почему механика бессильна в чужом мире
Для понимания физики лунной походки необходимо развенчать фундаментальное заблуждение: ходьба человека — это не механический процесс, а непрерывная задача управления. Чтобы доказать это, проведём мысленный эксперимент и поместим шагающую механическую куклу внутрь герметичного лунного скафандра в условиях одной шестой земной гравитации.
История техники знает примеры поразительно сложных автоматонов, которые с пугающей точностью имитировали биологические процессы. В XVIII веке Жак де Вокансон создал механического «Флейтиста» в человеческий рост, а Пьер Жаке-Дро сконструировал «Писаря». В XIX веке инженеры сосредоточились на шагающих автоматах: от заводных кукол Autoperipatetikos (1862), способных перемещаться по ровному полу, до амбициозного андроида «Парового человека» Дедерика и Грасса (1868), предлагаемого в качестве механической тягловой силы.
Но в этой исторической аналогии есть главное ограничение механического подхода. Даже самая совершенная механическая кукла из прошлого (например, шагающий механизм Чебышева) — это замкнутая система. Траектория движения каждой детали, углы сгиба суставов и интервалы между шагами жёстко определены геометрией шестерёнок, кулачков и рычагов. Движение автоматона — это неизбежное следствие его конструкции. Он не имеет обратной связи со средой.
Если перенести этот шагающий механизм, спроектированный и сбалансированный для работы на Земле, в условия Луны с уровнем гравитации 1/6 g и интегрировать его внутрь тяжёлого скафандра, то устройство функционировать не сможет. В условиях лунной поверхности автомат продолжит переставлять опоры с прежней заданной частотой и с прежним крутящим моментом приводов. Но из-за того, что прижимная сила упала в шесть раз, а масса и инерция конструкции остались прежними, механика начнёт вести себя непредсказуемо. Устройство при каждом шаге будет слишком сильно отталкиваться от грунта, улетать вверх, терять сцепление с поверхностью, хаотично заваливаться по инерции в стороны и неизбежно перевернётся при первом же шаге.
Заводной механизм Autoperipatetikos на Луне работал бы, но кукла с его помощью ходить бы не смогла. Источник: Youtube.com
Механика без управления не способна к саморегуляции. У шестерёнок и пружин нет процессора и нервной системы, чтобы оценить изменившиеся физические константы планеты. Чтобы кукла пошла по Луне, ее создателю пришлось бы полностью пересчитать длины всех рычагов, заново выточить кулачковые валы и изменить балансировку противовесов.
Человеческое тело устроено иначе. Наш скелет и мышцы работают как система рычагов, но управляются живым компьютером — мозгом. Он не действует по шаблону. Организм выживает в новой среде благодаря проприоцепции и вестибулярному аппарату. Они непрерывно поставляют в мозг данные о силе тяжести, сопротивлении окружения, одежды и обуви, плотности грунта. Ходьба не застывшая программа. Это непрерывный процесс, где мозг в реальном времени пересчитывает физические параметры. На Луне он столкнется со средой, где привычные земные автоматизмы могут привести к падению, и вынужден будет менять старые программы, чтобы сохранить жизнь.
В этой связи: в отличие от механической куклы, которая запрограммирована на глухой механический цикл, современный адаптивный робот, такой как Atlas от Boston Dynamics, сможет ходить по Луне , — за счёт процессоров и алгоритмов машинного обучения с подкреплением цифровым «мозгом», этот андроид успешно справился бы с задачей. Его система управления способна на лету пересчитывать физические константы среды, компенсировать жёсткость костюма и удерживать баланс, полностью имитируя работу живой нервной системы.
⇡#Часть 3. Три фактора для живого процессора: кинематика лунного шага
Походка астронавтов на записях NASA кажется странной именно потому, что человеческий мозг на Луне решал абсолютно уникальную задачу, с которой ни один испытатель не сталкивался на Земле. Чтобы пилот просто мог удерживать равновесие и перемещаться по поверхности, его нервная система была вынуждена непрерывно обрабатывать три критических фактора, которые детально зафиксированы в технических отчетах Apollo и подтверждены современными исследованиями.

Походка астронавтов в кадрах NASA выглядит непривычной. Всё потому, что на Луне мозг человека решал уникальную задачу, с которой никто раньше не сталкивался на Земле. Фото NASA
⇡#Физический парадокс веса и массы
Вестибулярный аппарат, внутренние органы и глубоко расположенные рецепторы мышц мгновенно передали мозгу информацию о том, что сила тяжести уменьшилась в шесть раз. Астронавт, облачённый в массивный лунный скафандр (34,5 килограмма), с ранцем жизнеобеспечения (56,5 килограмма), на Земле имел внушительную массу в 170 килограммов. На Луне он весил уже всего 28 килограммов, но его физическая масса и инерция остались прежними — всё те же 170 килограммов. В этом заключается ключевое различие: вес — это сила, с которой тело давит на опору или подвес. Она зависит от гравитации планеты, тогда как масса — это мера инертности самого тела, не исчезающая даже в невесомости.
Этот парадокс полностью изменил биомеханику ходьбы. На Земле мы при каждом шаге слегка наклоняемся вперёд и наша вынесенная нога помогает нам удержаться. Но на Луне гравитация настолько слаба, что при попытке идти обычным шагом конечности отрывались от поверхности лишь на короткое время. Чтобы удержаться на ногах, нужно было приложить огромное усилие, дабыпогасить инерцию тяжёлого тела в скафандре.
Исследования NASA показали, что при гравитации ниже 0,5 g обычная ходьба с тяжелым ранцем за спиной становилась энергетически затратной. Мышцы ног быстро уставали из-за постоянного статического напряжения. На крутых склонах и при переноске грузов астронавты переходили на прыжки на двух ногах (hop), а обходя ровер, использовали шаркающий шаг-подскок (skip/shuffle). Как позже отмечал Нил Армстронг, тело автоматически переключалось на эти техники, так как они помогали экономить силы и кислород.
⇡#Сопротивление давления внутри скафандра
Второй фактор, который пришлось обрабатывать мозгу, — это эргономика «пустолазного костюма» астронавтов Apollo. Вопреки распространенному мифу, скафандры (уже начиная с леоновского «Беркута» и уайтовского G-4C) в вакууме не раздувались как баскетбольный мяч или садовый шланг под напором воды, лишая человека подвижности.
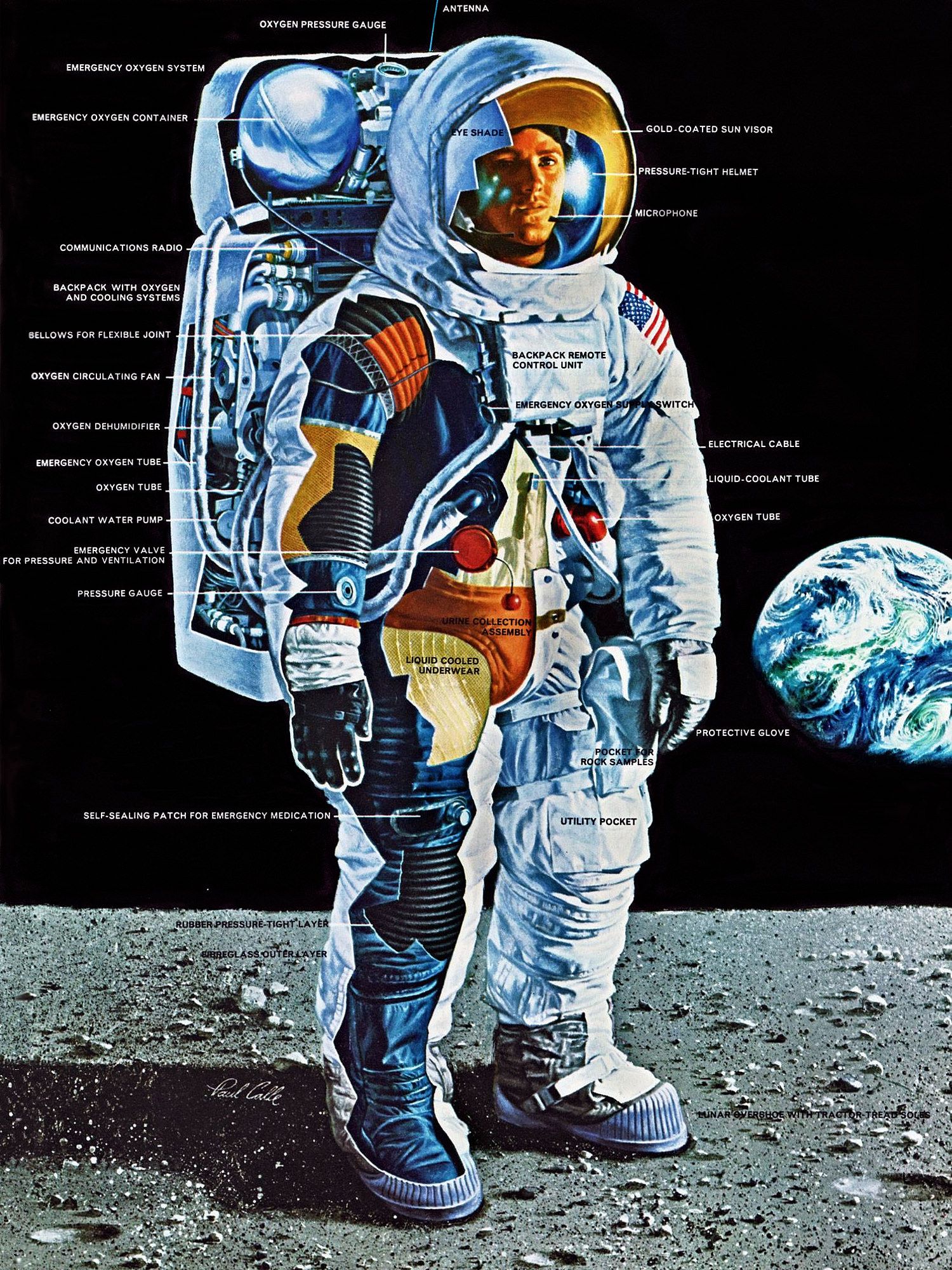
Устройство скафандра A7L. Картина художника Пола Калле
Что уж говорить об A7L. Конструкция была сложной и многослойной, включающей высокотехнологичные элементы. Внешняя теплоизоляционная оболочка дополнялась силовым "каркасом", который удерживал антропоморфные размеры. В местах, где располагались суставы, использовались гофрированные секции из неопренового каучука, соединенные с тросовой системой для ограничения растяжения. Суставы имели постоянный объем, что позволяло астронавтам сохранятьвысокую подвижность. Коленные шарниры оптимизировались для сгибания ног до 80°, что составляло более половины нормальной физиологической амплитуды сгибания человеческого колена.
Но внутри скафандра поддерживалось рабочее давление кислорода в 25,5 кПа (ровно 0,25 атмосферы). Хотя шарнирные узлы работали по принципу постоянного объема и минимизировали усилия против внутреннего давления, упругая деформация наддутой многослойной оболочки и трение элементов силового каркаса все же создавали постоянный эффект пружинного эспандера. Чтобы просто согнуть руку или ногу, астронавту приходилось каждую секунду преодолевать совокупное механическое сопротивление экипировки. Кроме того, в первых модификациях A7L полностью отсутствовал поясной шарнир: просто так нельзя было согнуть корпус в тазобедренной области и перевести тело в положение сидя.
На лунной поверхности живой процессор в голове пилота столкнулся с неожиданным эффектом. Несмотря на тщательные тренировки на наземных наклонных симуляторах, полностью адаптироваться к сочетанию избыточного давления в скафандре и трёхмерной динамики инерции человеческого тела не удавалось. Реальное взаимодействие этих факторов вынуждало мозг в первые же минуты внекорабельной деятельности оперативно изменить стратегию передвижения. Чтобы избежать сопротивления скафандра при каждом шаге, нервная система скорректировала походку, сделав её более «плоской». Астронавты опытным путём отказались от привычного земного переката с пятки на носок. Их движения стали напоминать широкие шаркающие подскоки с минимальным отрывом подошвы от поверхности, что обеспечивало большую устойчивость на сыпучем лунном грунте.

Командир миссии Apollo 16 Джон Янг на Луне у кратера Норт-Рэй. На заднем плане — лунный ровер (LRV). 23 апреля 1972 года. Фото NASA
⇡#Смещение центра тяжести и страх падения
Третьим элементом, требующим от мозга значительных усилий, был ранец PLSS. Вес этого массивного устройства (более четверти от общего веса астронавта и его снаряжения) уменьшился пропорционально лунной гравитации, но его масса и инерция оставались прежними. Ранец смещал центр тяжести назад и вверх, создавая ощущение тяжёлого рюкзака на плечах. При каждом шаге тело из-за инерции стремилось отклониться назад. Чтобы сохранить равновесие, мозг постоянно направлял команды мышцам спины и корпуса удерживать туловище наклонённым вперёд на 16,4° (согласно анализу программного обеспечения OpenPose, опубликованному в журнале Muscle & Nerve в 2026 году). На Земле угол наклона при ходьбе составляет всего 2,63°.
Кроме того, мозг испытывал огромное психологическое давление — страх падения: если упадешь, можно повредить остекление шлема или ранец. А это – разгерметизация и смерть. Из-за наклона корпуса вперед и конструкции шлема трудно рассмотреть, что под ногами, да ещё и лунный грунт осыпается и ведёт себя непредсказуемо.
В ответ на угрозу мозг включал режим максимальной безопасности: расширял опорную базу (отношение ширины постановки стоп к ширине плеч составляло 1,27) и увеличивал фазу двойной опоры (когда обе ноги стоят) до 40% времени (на Земле это всего 10%).
Лунная походка — это не вольный полёт, а осторожные движения человека, собранного, наклонённого вперёд и широко расставляющего ноги. Имитировать эту тонкую работу нервной системы под воздействием трёх факторов в земных условиях было невозможно.
⇡#Часть 4. Протокол борьбы: документированный хаос реальных шагов
Главное отличие реальных физических процессов от голливудских постановок — отсутствие идеальной ритмичности. В кино движения актёра, подвешенного на тросах, подчиняются сценарию и командам режиссёра. Шаги на площадке получаются одинаковыми, предсказуемыми и цикличными. Глаз зрителя интуитивно ожидает от фальшивки идеального порядка. Однако технические отчёты лунных миссий (особенно Apollo 15 и Apollo 16, содержащие посекундные замеры параметров движений астронавтов) фиксируют хаос, который невозможно отрепетировать на Земле.

Командир Apollo 17 Юджин Сернан оказался в опасной ситуации во время своего третьего выхода на поверхность Луны 13 декабря 1972 года. На видеозаписи телетрансляции видно, как он потерял равновесие во время «передвижения прыжками кенгуру» (bunny hopping). Пытаясь добраться до лунного ровера, Сернан совершил слишком высокий прыжок, не удержал баланс при приземлении и упал вперёд, проскользив по поверхности реголита. Видео NASA
Согласно количественному анализу видеоматериалов, длина шага астронавтов на Луне составляла 39 сантиметров. Однако эта цифра — лишь усреднённое значение. В реальности длина и время шагов постоянно менялись, отражая ежесекундную борьбу мозга с меняющимся грунтом.
Покадровый биомеханический анализ видеозаписей и дебрифинги миссий позволяют реконструировать динамику шагов астронавта на неровном склоне. Этот хаос адаптации проявляется так:
Этот рваный, асимметричный график — отпечаток работы нервной системы. Астронавты годами тренировались на Земле: на наклонных платформах, в бассейнах гидроневесомости и на самолётах KC-135. Их мозг прибыл на Луну с набором готовых нейронных связей, но на месте занимался непрерывной «калибровкой» этих программ.
В отчётах NASA есть специальный раздел «Fall/near-fall analysis» (Анализ падений и близких к падению ситуаций). Конспирологи обычно используют кадры падений, чтобы доказать обман: «Смотрите, они запутались в тросах!». Однако детальный физический анализ этих моментов показывает обратное.

Пилот лунного модуля Apollo 17 Харрисон Шмитт теряет равновесие при сборе образцов. Долина Таурус-Литтров, декабрь 1972 года. Снимки падений в архивах NASA редки, так как хроника полётов не фокусировалась на курьёзах. Большинство инцидентов фиксировали видеокамеры и устные отчеты, а не фотоаппараты. Видеокадр NASA
При любом скрытом проскальзывании ног или незаметной попытке экстренно затормозить поверхностный слой дисперсного реголита мгновенно сдвигался. Подошвы ботинок полностью лишались жёсткого упора. Протектор просто буксовал в сухой пыли, которая из-за отсутствия атмосферной влаги и влажностной когезии вела себя как абсолютно несвязанная сыпучая масса со сверхнизким сопротивлением поверхностному сдвигу. Возникающий при этом опрокидывающий момент из-за заноса консольной массы за спиной (ранец PLSS) развивался по сложному сценарию.
Падение человека в массивном скафандре на Луне происходит совсем не так, как на Земле. Сам процесс заваливания сильно растянут во времени: с момента, когда астронавт потерял вертикальное равновесие, и до момента удара о грунт проходит от полутора до двух секунд. В течение этого затяжного падения человек инстинктивно и хаотично машет руками, пытаясь восстановить баланс и удержаться на ногах.
Воссоздать это на Земле на наклонном тренажёре или с помощью подвесных тренировочных тросов невозможно. Здесь мощное притяжение (9,81 м/с²) мгновенно утягивает потяжелевшие руки и ноги человека строго вниз по вертикали. Человек в скафандре падает камнем, полностью ломая ту самую плавную и затяжную траекторию, по которой астронавт летит на лунную поверхность.
Биомеханика подъёма после падения на Луне также уникальна. Привычные движения тела здесь не работают. На Земле упавший человек группируется, поджимая колени. Но на Луне из-за жёстких ограничений экипировки сгруппироваться было невозможно. И мозг использовал нестандартные приёмы:
- при падении на спину астронавт перекатывается на бок, разворачивается вокруг ранца PLSS, упирается одной ногой в грунт и мощным толчком выталкивает себя вверх;
- при падении вперёд он использует метод «отжимания с разворотом» (push-up twist): лёжа на животе, делает резкий толчок руками от земли. В условиях слабой гравитации этого усилия хватало, чтобы поднять торс. Пока тело зависает в воздухе, астронавт подтягивает ноги под центр тяжести и быстро встаёт. Если в руках инструмент (например, совок для грунта или геологические щипцы), он использует его рукоятку как опорный рычаг.

На стоп-кадре телетрансляции миссии Apollo 17 (декабрь 1972 года) пилот лунного модуля Харрисон Шмитт теряет равновесие на склоне. Снимок иллюстрирует описанную траекторию затянувшегося падения: тело астронавта плавно опускается в течение полутора-двух секунд, и он успевает вытянуть руки вперёд. Эта поза подготавливает его к последующему подъему с помощью техники «отжимания с разворотом» (push-up twist). Видео NASA
Лунная походка — это необычный памятник биомеханики. Она кажется нелепой и некинематографичной именно потому, что реальна.
Если бы в 1969 году правительство США действительно наняло величайшего визионера кинематографа для фальсификации высадки, то результат выглядел бы диаметрально противоположным. Кубрик, как главный эстет эпохи, физически не допустил бы в кадре того хаоса и визуального уродства, которые зафиксировала хроника миссий Apollo.
Перфекционист, заставлявший актёров делать по сто дублей ради идеального кадра, никогда не показал бы миру национальных героев в столь комичном и беспомощном виде: спотыкающимися, беспорядочно машущими руками, заваливающимися на спину, неуклюже отжимающимися от грунта и подпрыгивающими как мальчики-зайчики на детсадовском утреннике.
Для голливудской пропаганды такой «треш» стал бы сокрушительным провалом. Кубрик либо заставил бы актёров на тросах демонстрировать величественный, монументальный шаг, либо просто отказался бы режиссировать этот баллистический кошмар.
Однако повторить эти кадры не могли не только в Голливуде, но и в тренировочных центрах самого космического агентства. Несмотря на годы подготовки по программе Apollo, земные тренажёры не могли воссоздать комплексную триаду ключевых факторов: необычное поведение реголита, ограниченную подвижность тела в скафандре и… постоянный стресс от осознания, что любое падение может привести к разгерметизации.
Именно поэтому лунная съёмка запечатлела не отрепетированный на Земле алгоритм, а секундную адаптацию живого человеческого мозга. Мозг пилота прямо в кадре ломал привычные рефлексы и приспосабливал тело к экстремальным условиям. Этот задокументированный компромисс между биологией человека и агрессивной физикой чужого мира и является главным, неопровержимым доказательством подлинности хроники.
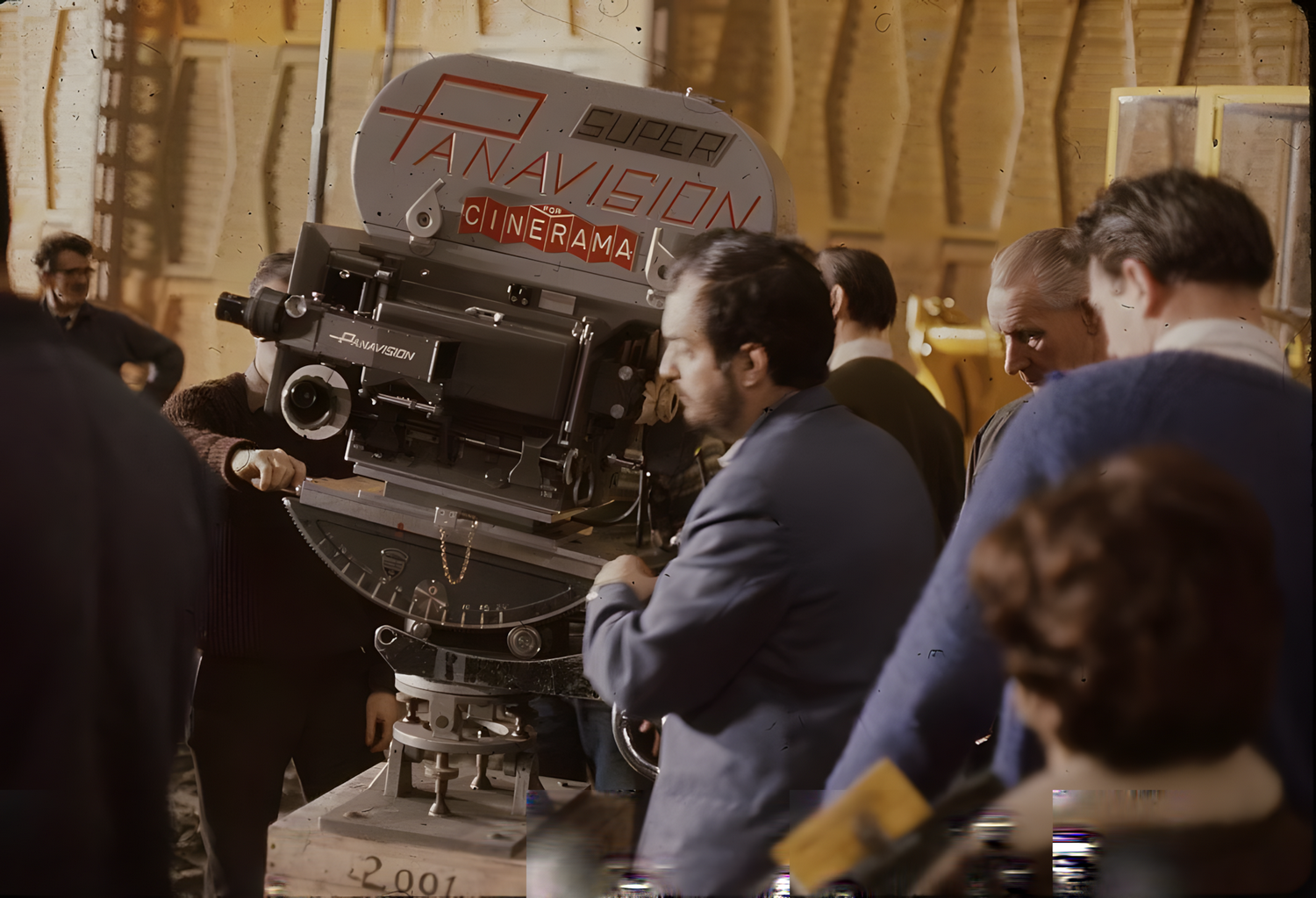
Стэнли Кубрик на съёмках фильма «2001: Космическая одиссея» стремился к совершенству. Это требовало идеальной геометрии кадра и точного контроля над движениями актёров в павильоне. Но именно эта точность и эстетика прямолинейных движений впоследствии опровергли предположения о том, что Кубрик мог бы режиссировать реальную лунную хронику, фиксирующую хаотичные и ломаные физические процессы. Фото Warner Bros. / Metro-Goldwyn-Mayer