Уже с самого начала этого года мы говорим о том, что наука от романтики переходит к серийному производству робототехнических приспособлений. И если ранее повсюду анонсировались опытные образцы, то теперь имеет место их розничная продажа. В частности, речь идет об экзоскелетах, которые позволяют улучшить механику человеческого тела.
Робототехническая HAL-система (аббревиатура от Hybrid Assistive Limb, переводя дословно, "гибридная вспомогательная конечность") Bionic Suite уже готова к массовому производству и должна поступить в продажу по цене примерно $19000. Разработка Bionic Suite велась в течение 10 лет.
Структурно ее можно описать следующим образом - на человека одевается экзоскелет с биоэлектрическими сенсорами, сенсорами гравитации, силовыми приводами, батареей питания и компьютером с возможностью беспроводной связи. И хотя все это весит достаточно много, человек не ощущает никакой нагрузки, поскольку она распределяется только в рамках экзоскелета. HAL-система может "увеличить" мышечную силу рук и ног, например, позволит поднимать тяжести выше 40 кг, при этом для человека такая нагрузка окажется незаметной.
Одними из самых важных элементов подобных конструкций являются биоэлектрические датчики, которые считывают импульсы, подаваемые от мозга к мышцам. Данные от этих сенсоров поступает в компьютер, где преобразуются в команды для силовых приводов экзоскелета.

На данный момент имеет смысл говорить о появлении серийных экзоскелетов The Raw Feed для ног. В самом ближайшем будущем можно ожидать появления более полноценного комплекта. HAL-экзоскелеты Bionic Suite в шутку называют костюмами супермена. И это похоже на действительность.
Сама идея выпуска экзоскелетов не нова и уже не раз обсуждалась в рамках применения в военных и космических целях. Но если анализировать ситуацию более конкретно, то развитие данного направления может столкнуться с некоторыми трудностями - стоит ли создавать экзоскелеты, когда можно без труда сделать специализированные управляемые человеком машины? Например, для поднятия тяжестей может вполне подойти обыкновенный автопогрузчик, производство которого не требует серьезных затрат и применения сверхвысоких технологий.
Вместе с тем, активизируя внимание на экзоскелетах, мы подразумеваем возможность более точного выполнения операций, работу на неровных поверхностях, "умную" транспортировку грузов.
Что нас ожидает в ближайшем будущем? Современные модели будут, пожалуй, анализировать команды мозга для небольшой группы мышц, таких как, например, бицепсов, трицепсов, дельтавидных, бедра и голени - то есть рук и ног. О появлении экзоскелета с биоэлектрикой мышц спины и позвоночника пока речи не идет. Я не имею в виду вариант, когда позвоночник поворачивается на 20 градусов, а экзоскелет на 360 :). Дело в том, что сами экзоскелеты представляют из себя тяжелые конструкции, и человек вряд ли сможет их поворачивать самостоятельно.
Другой момент заключается в специфике биоэлектрических датчиков, считывающих информацию не напрямую с мозга, а с мышц. Именно эта идея и позволяет сейчас говорить о появлении первых экзоскелетов.
То, что японский университет Waseda University попал в историю антропоморфных роботов - неопровержимый факт. Нужно отметить, что само слово "Waseda" - уже брэнд. Глядя на современных Honda ASIMO, Fujitsu HOAP-2 или Sony SDR-4X невольно вспоминаешь фотографии начала 70-х, на которых был изображен громоздкий "железный" гуманоид WABOT-1 с кучей проводов.
Удивительно, что в самом начале транзисторной эры, когда производственные процессы были далеки от совершенства, профессор Иширо Като (Ichiro Kato) в рамках данного университета создал лабораторию, которая смогла выпускать функционирующие модели. При этом стоит отметить, что многие из выбранных тогда направлений оказались предопределяющими. Например, в середине 80-х в роботов была внедрена поддержка стандарта MIDI, благодаря чему роботы могли самостоятельно музицировать. Если смотреть на хронологию событий, то стандарт MIDI потом использовался не только как чисто музыкальный, но и как один из вариантов командной системы управления. В конце 90-х нередко можно было встретить модели, которые управлялись с помощью MIDI-сообщений.
Возвращаясь к Waseda University, скажем, что вы можете ознакомиться с историей японских роботов-гуманоидов, посетив сайт Humanoid Robotics Institute, где можно найти видеофайлы, буклеты, книги, посвященные данной теме.

Американцы, например, пошли по совершенно иному пути, поставив перед собой задачу создания армии роботов. Их не столько интересовали человекоподобные механизмы, сколько вооруженные до зубов вездеходы. Если говорить о современных разработках, то японцы больше акцентируют внимание на привлекательных роботах-гидах, роботах-сиделках, роботах-актерах. В США "очеловечивание" роботов происходит другим образом - американцы называют именами пылесосы-шайбы Roomba, или устраивают гонки R2-D2 (персонаж "Звездных войн") самостоятельной сборки.
В данном материале мы расскажем о роботах-флейтистах (Anthropomorphic Flutist Robot) серии WF, говорящих роботах WT, разрабатываемых в рамках подразделения Waseda University - лаборатории Takanishi.
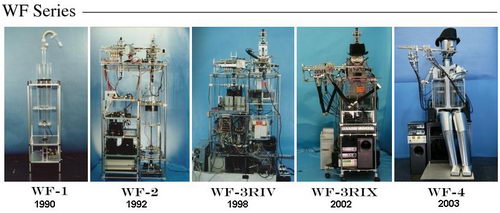
Разработка серии WF началась в 1990 году. За основу была взята идея механического повторения движений музыканта-флейтиста. Основное внимание было сфокусировано на создании механической эмуляции легких, горла, языка, губ, рук и пальцев. Первая модель WF-1 была не очень похожа на человека - на специальной подставке-раме была размещена система из цилиндров и трубок, эмулирующая легкие, горло и губы.
В 1992 году была продемонстрирована существенно доработанная модель WF-2, у которой появились руки и пальцы, правда еще в неявном их виде. Именно с этой модели проявились очертания реализации придуманной идеи - вся система в целом интегрирована с MIDI, и позволяет преобразовывать MIDI-сообщения в команды для всех эмулируемых механических элементов. Но задача была не из легких, поскольку изобретатели из лаборатории Takanishi хотели создать профессионального музыканта, играющего с учетом всех нюансов звукоизвлечения. Поэтому для серии WF- наступило долгое время испытаний и доработок.
В 1998 году появляется модель WF-3RIV, внешне похожая на кучу металлолома, а в 2002 она приобрела определенные очертания в виде WF-3RIX. Для усиления визуального эффекта разработчики сделали достаточно страшное пластиковое лицо (понятно, что не художники они) и сверху на WF-3RIX нахлобучили черный котелок. По внешнему виду WF-3RIX остался смешной этажеркой.
По существу, данная версия третьей модели могла использоваться как "живой" MIDI-инструмент. Все управление производилось с помощью двух компьютеров - первый (секвенсор) отвечал за аккомпанемент, генерацию темпа и тона, второй - за управление непосредственно роботом. Синхронизация между ними происходила по протоколу MTC (MIDI Time Clock). В качестве дополнительного элемента управления была разработана специальная педаль, с помощью которой можно запускать систему на воспроизведение и обозначать темп. Данное решение было специально создано для обеспечения совместного выступления WF-3RIX и человека-музыканта.
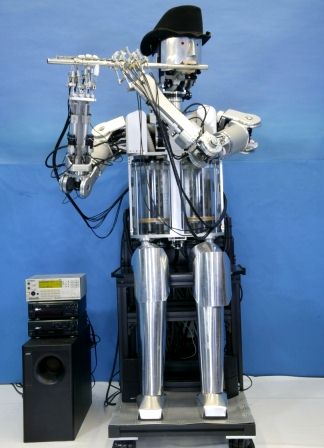
2003 и 2004 годы разработчики посвятили созданию новой модели WF-4. Одна из основных целей, которая преследовалась изобретателями - создание интерактивной модели "человек-робот". На живого музыканта надевались специальные датчики, считывающие информацию о движении рук, дыхании, педаль заменили на специальное чувствительное покрытие пола, а музыкальную информацию получали путем записи через микрофон. Внешне WF-4 также изменился - страшное пластиковое лицо было заменено на глупое металлическое, появились несуществующие ноги (муляж). Вместо подставки под инструмент были реализованы статические механические руки-держатели. Таким образом, набор металлолома превратился в гуманоидоподобное существо.
Среди других усовершенствований можно отметить новый вариант механизма губ, позволяющий более стабильно управлять воздушным потоком.
WF-4R (Waseda Flutist No.4 Refined) появился в конце 2004 года. Она является последней в серии WF, и требует более подробного описания:
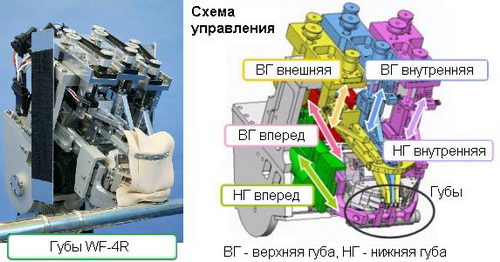
Губы. Достаточно сложный по конструкции механизм, предполагает пять степеней свободы (3 для верхней губы и 2 для нижней). Помимо того, что он сложный, так он еще и достаточно точный, так как позволяет аккуратно управлять воздушным потоком.
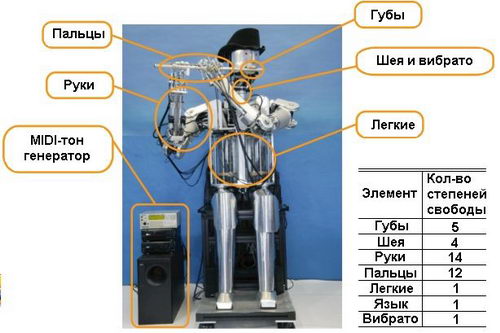
Легкие. Выполнены в виде двух цилиндров с поршнями, общий объем которых составляет 0,812 кубических метров, что соответствует объему легких взрослого мужчины.
Горло (шея). Имеет четыре степени свободы, что позволяет наиболее близко сэмулировать поведение музыканта.
Механизм вибрато. Выполнен в виде отдельного блока, расположенного за шеей WF-4R.
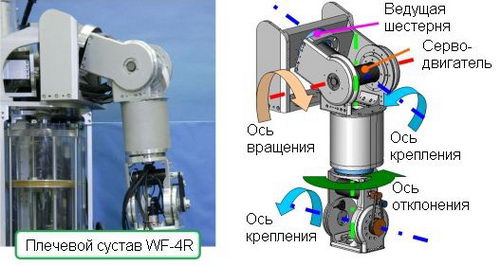
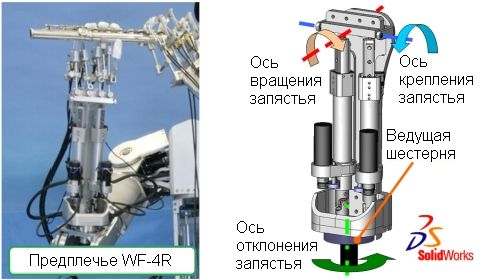
Руки. В WF-4R были полностью переделаны руки. Если такие важные элементы как кисти и пальцы не претерпели существенных изменений, то плечевой сустав и предплечье подверглись основательной доработке. Например, плечевой сустав (4 степени свободы) и предплечье (3 степени свободы) оснащены серводвигателями, специальная конструкция предусматривает жесткое фиксирование положения кистей рук и, соответственно, инструмента. Эта система появилась неспроста, поскольку в более ранних моделях флейта и кисти рук держались на специальной раме. Теперь же реализованы полноценные руки. Думается, что в будущем данная модель может интегрироваться с другими разработками от Waseda, и, следовательно, сможет танцевать или интерактивно повторять движения человека.
Пальцы. Это основной структурный элемент, который дорабатывается год от года. Кисть WF-4R напоминает руку "Терминатора", оснащена специальными сервомоторами. На робо-пальцы одеты специальные пластиковые колпачки, имеющие внешнее сходство с человеческими пальцами. Каждый палец WF-4R может открывать и закрывать клапаны флейты с частотой до 8 раз в секунду.
Вот, в принципе, и все, что касается WF. На сайте лаборатории Takamishi вы сможете найти видеоматериалы, в которых WF-4R играет "Полет шмеля" Римского-Корсакова либо интерактивно повторяет движения человека.
По всей видимости, WF-4R -промежуточная модель. Но на ее базе сформируется целый пласт будущих роботов-музыкантов - пианистов, гитаристов, барабанщиков. С другой стороны, в рамках разработки WF-4R создаются уникальные элементы, механически повторяющие возможности нашего тела. Например, руки WF-4R пока не имеют аналогов. Анализируя события, можно отметить, что именно в Японии мы со временем и сможем получить первого "Терминатора" - "живая плоть на железном скелете".
Сейчас говорящими роботами нас не удивишь, поскольку даже компьютеры могут читать текст человеческим голосом, а программы типа Yamaha Vocaloid вообще позволяют ресинтезировать пение реальных людей. Но все это в программном виде…
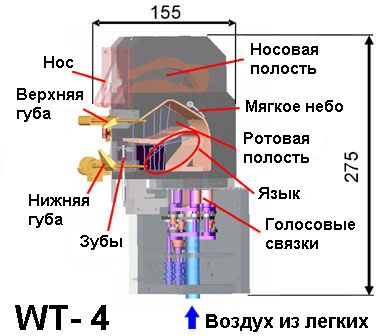
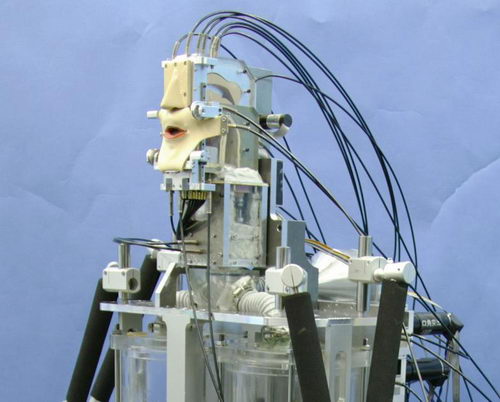
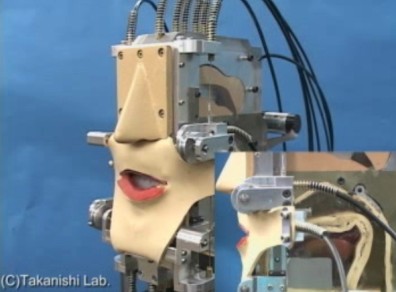
Тем не менее, лаборатория Туканиши (Takanishi Laboratory) из японского университета Waseda University, широко известного миру своими робо-разработками, создала уникальную говорящую модель Waseda Talker No. 4 или сокращенно WT-4. Уникальность данного изобретения состоит в том, что в WT-4 попытались эмулировать голосовой и речевой тракты человека. Каким же образом? Они создали механическое повторение каждого из наших органов, участвующих в синтезе речи, с определенным количеством степеней свободы движения (общее количество для всех элементов достигает 19). WT-4 имеет "легкие", "голосовые связки", "язык" (7 степеней свободы), "губы" (5 степеней свободы), "зубы", "носовую полость", "мягкое небо". Сделаны эти элементы из специального термопластика.
Таким образом, ученые пытаются повторить особенности человеческого речевого аппарата и создать механический синтезатор речи. На данный момент имеет смысл передать некоторую хронологию событий, которые привели к современному WT-4. Первая модель Waseda Talker была разработана к 2000 году.
В Waseda Talker No.1 были реализованы ключевые элементы механической конструкции, повторяющей человеческие голосовой и речевой тракты. У WT-1 имелись "легкие", "голосовые связки", "язык" с 6-ю степенями свободы, губы с 4-мя степенями свободы, "зубы", "носовая полость" и "мягкое небо". Общее число степеней свободы всех элементов равнялось 15. Модель позволяла воспроизводить гласные звуки "а", "и", "у", "э", "о". На самом деле это достижение не было таким значимым. Эти же звуки впервые были синтезированы в рамках механических вокодеров, изобретенных еще в конце XVII века.
В 1779 году российский профессор Кристиан Краценштейн (в других источниках упоминается как Кристиан Готтлиб) создал акустическую модель, позволяющую создавать гласные звуки, используя различные геометрические формы резонаторов. И, кстати, изобретатели из Waseda University пошли по очень похожему пути…
В 2001 году Waseda University выпускает слегка переделанную первую модель под маркой WT-1R, которая может произносить новые звуки "с", "х", "м", "п" и слово "Waseda". В 1791 году Вольфганг фон Кампелен (Wolfgang von Kempelen) представил миру акустическо-механическую говорящую машину, которая воспроизводила определенные звуки и их комбинации. Шипящие и свистящие выдувались с помощью специального меха с ручным управлением. В середине XVIII века это изобретение было улучшено ученым Чарльзом Уитстоуном (Charles Wheatstone), и уже могло воспроизводить гласные и большинство согласных звуков.
В 2002 году выходит в свет вторая модель Waseda Talker, а именно WT-2. В предыдущих вариантах изобретатели ставили перед собой задачи простого воспроизведения звуков. Модель номер два не то, что уже может собирать из звуков слова, но говорит голосом, похожим на человеческий. Поскольку голосовой тракт получился достаточно "длинным" (175 мм), механически синтезированный голос Waseda был подобен тембру голоса взрослого мужчины. Это получилось благодаря оптимизации модели в целом - количество степеней свободы для "голосовых связок" увеличилось до 3, у "языка" уменьшилось с 6 до 5.
В 1846 году Джозеф Фабер (Joseph Faber) представил свой говорящий орган, в котором была реализована попытка синтеза не только речи, но и пения. В конце XVIII века знаменитый ученый Александр Белл (Alexander Graham Bell) создал собственную "говорящую" механическую модель, очень схожую с конструкцией Уитстоуна. С начала XIX века года стали распространятся электрические машины и ученые создали генераторы звуковых волн. Посему на данном этапе история механических вокодеров начинает расходиться с разработками Waseda.
В 2003 году WT-2 подверглась серьезной доработке и реализовалась в следующей модели - Waseda Talker No.2. В частности было увеличено количество степеней свободы движения для "языка" и "губ". Общее их число для всех элементов стало равняться 18. В WT-3 была значительно улучшена артикуляция.
Появился WT-4 (Waseda Talker No.4). Мы уже описали его технические характеристики в самом начале материала, но стоит отметить, что японские изобретатели достигли определенного совершенства - эта модель уже может воспроизводить около 50 японских звуков.
Четыре модели Waseda Talker - это только начало. Как мы можем отметить параллели с историей, Waseda Talker научится петь и, возможно, говорить на многих языках мира. Что удивительно в данной разработке - это ее механичность. В то время, когда многие акцентируют свое внимание на программных алгоритмах синтеза речи, японцы, с присущей им методичностью и точностью решили повторить голосовой и речевой тракты человека. И, кстати, это не единственное направление, развиваемое в рамках данного университета.
С такой же точностью они уже создали робота-флейтиста WF-4 (разработка началась в 1990 году и, скорее всего, легла в основу Waseda Talker), ходящие на ногах кресла WL-15 и WL-16, робота, выражающего эмоции - WE-4 (Waseda Eye No.4), двуногого "гуманоида" WABIAN-2. Во всех этих конструкциях используется механическое повторение элементов человеческого тела.
Нужно отметить, что подобными разработками сейчас занимаются многие японские ВУЗы и корпорации. Поэтому, говоря о роботах-гуманоидах, мы чаще всего обращаемся к опыту специалистов Страны Восходящего Солнца.
"Эпизод III" великой тридцатилетней саги Джорджа Лукаса примечателен не только тем, что за всю историю "звездного" сериала в кинотеатрах были введены возрастные ограничения, и не тем, что сам Лукас заявил, что данный эпизод будет последним. Новый фильм о "Звездных войнах" стал одним из самых кассовых в этом году. Пожалуй, это самая популярная кинофантастика на рубеже XX - XXI веков.
В конце апреля в Indiana Convention Center (США) состоялось крупнейшее мероприятие Celebration III, собравшее около 30 тысяч поклонников "Звездных войн". Его программа включала приезд некоторых участников создания фильма, сессию автографов, а для общего веселья были организованы гонки, семинар по роботостроению, большой игровой турнир.

Компания AMD организовала большие сетевые игры для более чем ста игроков, которые сражались в Battlefront Republic Commando или Knights of the Old Republic II. Игровые компьютеры были разработаны с соответствующим данному мероприятию дизайном - Alienware Aurora Star Wars Edition PC.
Объединение LucasArts, занимающееся разработкой игр, продемонстрировала демо Battlefront II, также было заявлено о скором появлении Revenge of the Sith и новой версии Star Wars Galaxies.

Наиболее интересными были гонки дроидов. Не так давно прокатилась волна создания собственных R2-D2. С одной стороны, это рассматривалось как технократический моддинг современных системных блоков персональных компьютеров, но истинные фанаты предпочли разработку и создание реальных прототипов. Одно из самых крупных образований в этой области - R2-D2 Builders Club, разместившееся в интернете по адресу www.astromech.net. Посетив данный ресурс, вы сможете не только увидеть огромное количество собранных моделей, но и получить подробную инструкцию, как сделать R2-D2 самостоятельно.
Именно благодаря усилиям этого клуба были организованы гонки Droidyard 500. Дроиды должны были в максимально короткое время прокатиться по 27-метровому выставочному павильону и вернуться на старт.
Важны не только результаты, но и участники. Например, Джерри Грин (Jerry Greene) продемонстрировал модель R9-D2, которую он собирал в течение трех лет и потратил на нее порядка $15000. R9-D2 не имела больших результатов на гонках, и действительно, этот 90-килограммовый алюминиевый дроид был слишком громоздким по сравнению с "пластиковыми" конкурентами. "Я раздосадован" - все, что и оставалось говорить Джерри Грину.


Непобежденным остался только R2-D2, принадлежащий инженеру-электрику из Колорадо Джиму Шима (Jim Shima). Стоимость этого дроида составляет $6000. Вообще, клуб R2-D2 включает очень много членов, единственным правилом для всех его участников является сохранение первоначальных размеров дроида. А цены могут быть и не такими "кусающимися". Например, один из R2-D2-строителей Дэн Штутген (Dan Stuettgen) потратил на своего дроида всего $200.

В рамках игрового турнира, организованного AMD, все участники сражались на компьютерах Alienware Aurora Star Wars Edition PC - мечте любого поклонника "Звездных войн"
Финал Droidyard 500 состоялся 24 апреля и, как мы уже сказали, победил R2-D2 Джима Шима. "Звездные войны" на современном этапе - это не только фильм, но и целое сообщество вокруг него. В киноверсии "Эпизод III" может оказаться и последним, но это не говорит об отсутствии продолжения в игровом и "роботодельческом" мирах.