"Работа - не я…" - любил говаривать волк. А поскольку народный фольклор приписывает нашим взаимоотношениям еще и "человек человеку - …", то теорему о человеческой лени можно считать доказанной.
На самом деле, для того, чтобы наши дети могли бездельничать, нам сейчас нужно очень много работать, что достаточно ярко демонстрирует ситуация с роботами в рамках прошедшего 2004-го года.
Еще за несколько лет до проведения этих состязаний начали формироваться команды участников, появилось огромное количество публикаций, где журналисты со смаком описывали ситуацию, когда автономный робот, исключающий управление с помощью человека либо другого биологического организма, преодолеет расстояние в 400 километров от Лос-Анжелеса до Лас-Вегаса.
При этом он сам будет анализировать окружающие факторы, огибать препятствия, следить за маршрутом и т.п. Американцы (а DARPA - это центральное подразделение Министерства Обороны США) установили огромный призовой фонд в 1 миллион долларов. Помимо всего прочего, победителю мог светить хороший контракт с военными, что, по существу, гораздо больше, чем сам вышеобозначенный призовой фонд.

В 2003-м году из 106 команд было выбрано несколько десятков, и… что-то в процессе работы над проектом организаторы как-то приуныли. Первый тревожный сигнал - изменения в правилах, по которым роботам нужно было преодолеть уже не 400 километров, как планировалось, а только 230 из них. Ситуация неуклонно приближалась к фиаско.

И вот, 13 марта 2004 года на старт вышло всего 15 автономных машин. Роботами их можно назвать с большой натяжкой, поскольку практически все команды напичкали электроникой обыкновенные автомобили, начиная от внедорожников и заканчивая грузовиками. Существенных ограничений на "рост и вес" не было, поэтому там, где тонули и переворачивались "малыши", крупные представители могли с легкостью прокладывать трассу.

Итак, 15 команд вышло на старт, дается сигнал на начало гонок. И….. с места тронулась только половина автономных машин, остальные демонстрировали молчаливое недоумение, в котором остались пребывать до конца соревнований. Не смотря на комичную ситуацию на старте, самое веселое было еще впереди. Лавина плохо соображающих машин бросилась на преодоление препятствий - основная часть трассы являлась бездорожьем.
Для одних было достаточно найти торчащую проволоку и запутаться в ней, для других роковой оказалась попытка преодолеть забор методом "лоб в лоб" (уникальнейший алгоритм). Условно победителем гонок можно назвать команду под номером 22, которая скрестила джип и орбитальную станцию. Данный гибрид проехал 12 километров, не заметил ямы и перевернулся, загоревшись при этом. Поскольку подобные гонки являются первыми в истории, то можно говорить о своеобразном рекорде.
Причина неудачного истечения соревнований DARPA Grand Challenge 2004 видится в постановке невыполнимых задач, отмежевания иностранных команд (на старт вышли только американцы).

Впрочем, недовольные решили организоваться под эгидой International Robot Racing Federation (сокращенно, IRRF) и провести свои "правильные" гонки. Призовой фонд был выбран таким же - 1 млн. долларов. Результаты DARPA Grand Challenge 2004 повергли многих в легкий шок, поэтому уже через несколько дней в соревнования IRRF вступили и команды из DARPA Grand Challenge.
Изначально проведение гонок IRRF было запланировано на конец сентября 2004 года (если не ошибаюсь, то назначено на 24-е число). Честно сказать, уже тогда, в марте, с трудом верилось, что после фиаско команд в Grand Challenge, из IRRF получится что-либо стоящее. И действительно, в сентябре ничего не произошло, сами соревнования были перенесены на неопределенный срок, и как одна из предполагаемых дат их проведения - середина весны-2005.
Какие же шаги предприняла DARPA? Напомню, что американцы очень не любят проигрывать. Практически сразу же по истечению мартовских соревнований появилась информация, что следующие гонки состоятся примерно в 2006-м году, а призовой фонд будет увеличен до 3 млн. долларов. Она оказалось не верной.
По информации, поступившей на данный момент, состязания DARPA Grand Challenge будут, проводится 8 октября 2005 года с призовым фондом в $2 млн. Правила существенно изменились, теперь участникам предстоит преодолеть расстояние около 280 километров (175 миль) по бездорожьям Калифорнии за 10 и менее часов (в среднем получается около 28 км/ч). В правилах, опубликованных 8 октября этого года, черным по белому написано, что к соревнованиям допускаются только американские команды. Причем иностранные фирмы и граждане могут участвовать только на уровне спонсорства, а государственные структуры других стран не допускаются и к такой возможности. Теперь, все вроде бы расставлено по своим местам и стало понятным, поскольку еще в 2003-м году среди 106 заявок было много иностранцев, в частности, мы писали о ездящих компьютерных системных блоках VIA WhiteBox, на сайте которых было заявлено об участии в DARPA Grand Challenge 2004.
DARPA Grand Challenge 2005 будут отличаться от уже прошедших соревнований, прежде всего, пониженным ажиотажем вокруг этого события. Не смотря на то, что "победитель" прошедших гонок преодолел всего 12 километров, расстояние увеличено на 50 километров по сравнению с 2004-м годом. Что это - самодурство или трезвая оценка ситуации?
На самом деле причина того, что многие роботы не двинулись со старта, а другие весьма неудачно "думали", состоит и в том, что на разработку и отладку машин выделялось очень мало времени. Сейчас, естественно, команды прогрессируют и осваиваются, и в 2005-м году мы увидим много команд-участников прошлых соревнований…
Если в 2005-м никто не достигнет финиша, призовой фонд перекочует в 2007 год, когда рассчитывается провести третьи по счету Grand Challenge.
Смелые идеи DARPA имеют под собой реальную подоплеку - уже около десяти лет проводятся соревнования автономно управляемых механизмов среди студентов. В основном, можно столкнуться с двумя серьезными образованиями в этой области: состязания на земле - IGVC (Intelligent Ground Vehicle Competition), в воздухе и под водой - AUVSI (Association For Unmanned Vehicle Systems Internatiomal).

В начале лета 2004-го года состоялись соревнования IGVC 2004 с призовым фондом в несколько десятков тысяч долларов. Вместо громко рычащих внедорожников и грузовиков как в DARPA Grand Challenge, в IGVC используются небольшие, способные переносить грузы, моторизированные тележки, напичканные различной электроникой. Задания, как и призовой фонд, облегчены.

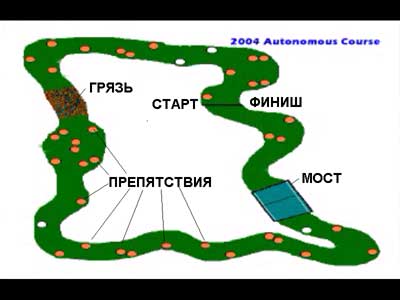
То есть, в рамках Autonomous Challenge (один из трех этапов соревнований), извилистая трасса ограничена белыми линиями, а препятствия помечены белыми полосами. Задачей роботов-участников является довезти груз от старта к финишу без управления со стороны человека. В большинстве случаев программные алгоритмы, разработанные командами, предусматривали преобразование данных, поступающих с видеокамер, в бинарный вид.
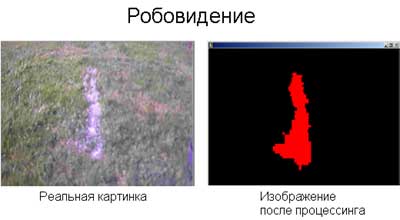
Таким образом, белый цвет представлял из себя "табу", и робот вел себя соответствующе. Помимо этого использовались ультразвуковые датчики дистанции для обнаружения вертикальных препятствий.
В прошедших в 2003-м году соревнованиях IGVC трассу Autonomous Challenge до конца не прошел никто. В рамках IGVC 2004 к финишу пришли уже два участника, и, скорее всего, в следующем году правила могут существенно усложниться.
Что касается AUVSI, то их соревнования сейчас в основном сосредоточены на подводной части. Робо-лодки успешно справляются с задачами навигации и поражения подводных целей. Сейчас правила усложнены в сторону снижения веса самих механизмов (35 килограмм вместо 100).
В сегменте подводных роботов развитие идет достаточно бурно и успешно. Прародители людей вышли из воды, прародители роботов, скорее всего, выйдут оттуда же. В прошлом году мы уже описывали ситуацию с роботами акулами Roboshark и Roboshark2, которые внешне и механически подобны рыбам.
Робо-акулы семейства Roboshark создавались с вполне мирными целями - исследования океанских глубин, а также съемки, в частности научно-популярного документального сериала для канала BBC. Буквально в конце этого года пришла новость о том, что китайцы создали свой прототип рыбы-робота, в котором с восточной тонкостью и изысками механически повторен принцип движения настоящей рыбы. Скоро состоятся первые запуски. Но и это не самое интересное, поскольку самое-самое произошло 11 сентября 2004 года…
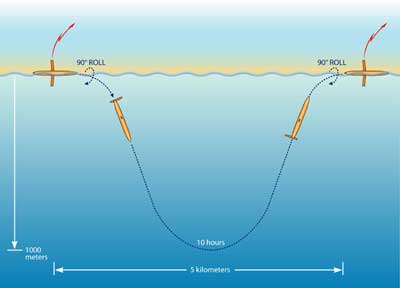
Именно тогда под воду ушел автономный робот Spray, разработанный учеными из океанографических институтов Скриппса (Scripps Institution of Oceanography) и WHOI (Woods Hole Oceanographic Institution). За пятьдесят дней он переплыл Гольфстрим - расстояние равное примерно тысяче километров. Этим фактом Spray открыл таблицу рекордов по дальности плавания среди автономных не радиоуправляемых машин. Интересен также принцип движения, который разработали ученые. Модель Spray не предусматривает никаких тяговых механизмов, таких как винт или водомет, а передвигается с помощью раскачивания. Внешне Spray напоминает ракету с двумя крыльями и хвостом.

Внутри у нее вместо баластной системы предусмотрен плавательный пузырь из полимеров, в который специальные насосы закачивают или откачивают масло, меняя тем самым общий объем корпуса. Помимо этого, в конструкции предусмотрен смещающийся блок аккумуляторов, изменение положения которого заставляет Spray то подниматься, то погружаться. Взаимодействие систем плавательного пузыря и смещающегося блока аккумуляторов позволяет двигаться роботу в горизонтальном направлении.
За одну секунду Spray проплывает расстояние равное 25-30 см, и теоретически способен преодолеть 6 тысяч километров. Конечно, когда робот в конце ноября достиг Бермудских островов, радости разработчиков не было предела, ведь помимо преодоления рекордно большого расстояния, был успешно опробован достаточно новаторский способ передвижения.
Ну и последняя новость, касающаяся океанографии, больше из мира надводного. 30 ноября стало точно известно, что к 2007 году в океан будет запущено порядка 3000 роботов-поплавков (проект Argo), которые будут следить за состоянием окружающей среды, и на базе полученных данных ученые-океанографы смогут составить будущую климатическую карту планеты. Уже сейчас выпущено чуть более 1500 роботов, и данный проект поддержан 18-ю странами.

В конце октября в калифорнийском городе Санта-Клара состоялась одна из крупнейших выставок робототехники Robonexus 2004. Посетителям ее очень повезло, поскольку они смогли воочию увидеть более 100 роботов, посмотреть на бои радиоуправляемых машин в рамках BattleBots, Robosumo и т.д.
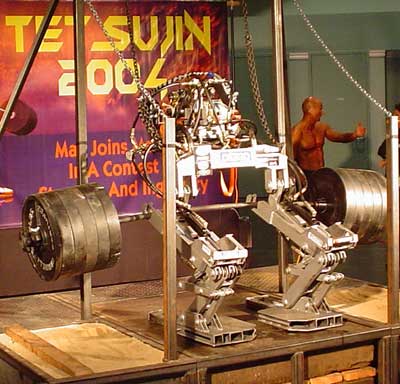
В принципе, данная выставка останется в истории во многом благодаря проведению одного из первых соревнований экзоскелетов по поднятию тяжестей - Tetsujin Bionic Weight-Lifting Competition. Экзоскелет - это совокупность механических устройств, улучшающих механические возможности человека. В частности, в рамках соревнований Tetsujin поднимали тяжелоатлетические штанги. Нужно отметить, что первый блин был комом - приехало очень мало участников, причем в большинстве случаев люди использовали "архимедову механику", то есть принципы рычага.

Еще эта выставка примечательна тем, что она - одна из первых, где были представлены изобретения в области роботов, как Запада, так и Востока. Японцы продемонстрировали гуманоида HRP-2.
Третьего декабря компания Toyota опубликовала планы насчет своего участия в выставке EXPO 2005, которая состоится 25 марта в японском городе Аичи (Aichi). Выставочный павильон этой компании будет напоминать середину 21 века, когда роботы и люди находятся в гармонических отношениях между собой, а также с природой. В рамках мероприятия будет продемонстрирован настоящий оркестр из семи роботов-музыкантов, помимо этого вести церемонию будет специальный робот-ди-джей.

На выставке будет представлено очень много интересных решений, хотя одно из самых интересных и необычных - кресло на двух ногах i-foot. Высота его достигает порядка 2 метров (2,36 м), вес равен 200 килограммам. Управляется с помощью джойстика, при этом может ходить по лестницам, сохранять и удерживать равновесие. При выгрузке/посадке пассажира i-foot присаживается, сгибая ноги по-птичьему. Внутри "кресла на ногах" сидеть достаточно удобно, поскольку футуристический корпус как бы обхватывает человека.

Скорость передвижения при ходьбе достаточно небольшая - 1,35 км/ч. А вес пассажира ограничен 60-ю кг. В общем, Toyota описала много красивых вещей, и чем совместно фантазировать, лучше дождаться самой выставки, причем ждать-то осталось совсем недолго.
Идея великого искусственного разума, управляющего сразу большой группой роботов, давно витала в воздухе. В частности, в прошлом году мы писали о разработке одного из подразделений DARPA, а именно, лаборатории робототехники и определения состояний (Robotics and State Estimation Lab) при вашингтонском университете. Речь шла о Centibot'ах - ста роботах, способных работать как по отдельности, так и единой командой. Основная задача, которую ставили перед собой разработчики - это быстрое исследование местности и создание ее карты. Первые испытания планировалось провести в декабре 2003 года, а реально они состоялись в январе 2004-го, после чего эксперименты повторялись несколько раз.


Centibot'ы с успехом проехались по всем лабораториям исследовательского центра и составили достаточно подробную его карту. Для таких задач можно использовать от двух до ста роботов, точность от этого не страдает, теряется только время. Каждый Centibot хранит приобретенную информацию, связывается по радиосвязи с "соплеменниками", в местах, где возможна передача сигнала, и сверяет их карту со своей. Помимо этого, роботы могут находить определенные объекты и сигнализировать об исполнении данной операции.

Вся ситуация выглядит достаточно увлекательно, только пока не совсем ясно, как Centibot'ы в своем современном исполнении могут быть связаны с военными операциями. Во-первых, они достаточно небольших размеров и на колесном ходу, что говорит о плохой проходимости и преодолении препятствий. Во-вторых, во время испытаний все двери лабораторий были открыты. В-третьих, в-четвертых… Самое главное здесь то, что испытывается коллективный разум, а потом, используя данные алгоритмы, можно управлять хоть армией танков.
Среди других интересных идей уходящего года следует отметить создание поселения роботов на Луне и модульные системы Crystalline, включающие множество роботов, способных собираться в различные формы и объекты.
А итоги этого года весьма назидательны, поскольку пелена эйфории вокруг современных роботов и их возможностей спала. Действительность показала, что существует еще очень много пробелов и нерешенных задач. К современным новостям науки и техники стоит относиться как к поп-музыке - она вроде есть, но музыки в ней как-то и нет. В общем, нужно работать. 2005 год окажется еще интереснее…