⇡#Первая в мире полностью углеродная солнечная ячейка
Солнечная энергетика — очень перспективное направление, этим и объясняется высокая активность научных исследований в данной области. Приоритетным направлением здесь является разработка эффективных солнечных ячеек на основе недорогих материалов, так как слишком высокая стоимость солнечных панелей мешает их массовому внедрению. Профессор Стэнфордского университета Женан Бао (Zhenan Bao) уверена, что одним из самых интересных материалов для солнечных ячеек является углерод.
Группа учёных под руководством Бао разработала первую в мире рабочую солнечную ячейку, все компоненты которой изготовлены из углерода. Её созданию предшествовала длительная экспериментальная работа в лаборатории. В отличие от традиционных кремниевых солнечных панелей, которые сегодня чаще всего можно встретить на крышах домов, изобретение Бао и её коллег может занять особую нишу на рынке. Гибкие углеродные ячейки можно наносить на внешние стены домов, окна, автомобили.
Как отмечают разработчики, создание кремниевых солнечных элементов требует множества трудоёмких шагов, тогда как углеродные ячейки можно формировать простыми методами, для которых не нужно использовать дорогие инструменты и оборудование.
Рис. 1. Фотография углеродной солнечной ячейки
Экспериментальная углеродная ячейка состоит из размещённого между двумя электродами светочувствительного слоя, который поглощает солнечный свет. В традиционной тонкоплёночной ячейке электроды изготавливаются из проводящих металлов и окиси индий-олова. Такой материал, как индий, является дефицитным и становится всё более дорогим с ростом спроса на солнечные панели, сенсорные дисплеи и другие электронные устройства, в которых он используется. В экспериментальной ячейке применяется графен (заменяет смешанный оксид индий-олова в аноде) и одностенные углеродные нанотрубки (заменяют серебро в катоде), которые характеризуются высокой электрической проводимостью и хорошими свойствами светопоглощения. Активный слой состоит из углеродных нанотрубок и так называемых «бакиболов» — молекул углерода в форме футбольного мяча диаметром около одного нанометра.
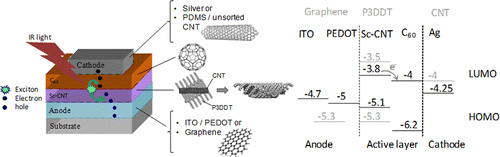
Рис. 2. Структура углеродной ячейки
Главным недостатком полученного экземпляра является КПД менее 1%, что гораздо меньше показателей коммерчески доступных решений. Но учёных это не останавливает. Они уверены, что эксперименты с различными углеродными наноматериалами, которые могут поглощать больше света в более широком диапазоне длин волн, включая видимый спектр, приведут к существенному повышению эффективности таких солнечных ячеек. Достоинством своей разработки исследователи называют также высокую прочность углеродных материалов, что позволяет эксплуатировать солнечные ячейки в экстремальных условиях.
Результаты экспериментов опубликованы в статье Evaluation of Solution-Processable Carbon-Based Electrodes for All-Carbon Solar Cells в последнем выпуске журнала ACS Nano.
⇡#Недорогой способ улучшить литиево-ионные аккумуляторы
Не менее актуальна и задача совершенствования современных литиево-ионных аккумуляторов. Одним из перспективных направлений здесь является создание новых материалов для анода. Одна только замена графита кремнием в аноде теоретически позволяет повысить ёмкость аккумуляторов раз эдак в десять.
Но чистый кремний оказался непригодным для использования. В процессе входа ионов лития в анод он расширяется в объёме примерно в четыре раза, а при выходе ионов, соответственно, сужается. Такой изнурительный режим работы способствует его быстрому разрушению. Разные исследовательские группы разрабатывали всевозможные кремниевые структуры и композиционные материалы на основе кремния и углерода, но лучшие образцы выдерживали не более ста циклов перезарядки.
Последние исследования показали перспективность использования композитных материалов на основе пористого кремния и углерода, которые позволяют добиться более длительного жизненного цикла анода. Но их коммерческое применение оказалось невозможным из-за слишком высокой себестоимости организации такого производства.
Учёные из Университета Райса предложили недорогой метод синтеза макропористых кремниевых частиц, которые при смешивании с полиакрилонитрилом и дальнейшей пиролизации могут служить анодом литиево-ионных аккумуляторов. Такой анод обеспечивает ёмкость 1000 мА*ч/г (по сравнению с теоретически максимальной ёмкостью 372 мА*ч/г для графита) при более чем шестистах циклах перезарядки (в режиме C/2, то есть два часа зарядки и два часа разрядки). В основе новой технологии лежит доступный метод обычного мокрого травления.
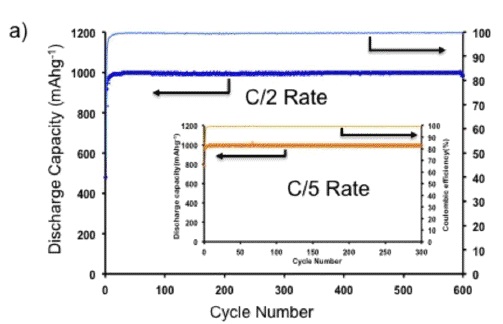
Рис. 3. Стабильность ёмкости анода при 600 циклах перезарядки
На первом этапе создаётся плёнка макропористого кремния толщиной 50–100 микрон с диаметром поры более 50 нм. Разработанный производственный процесс позволяет контролировать толщину материала, диаметр пор и характер пористости за счет изменения параметров травления, таких как приложенное напряжение, сопротивление пластины и концентрация электролита. Далее эта плёнка разбивается на частицы диаметром 10–50 микрон, которые смешиваются с полиакрилонитрилом. Из полученного материала формируются аноды с использованием пиролиза.
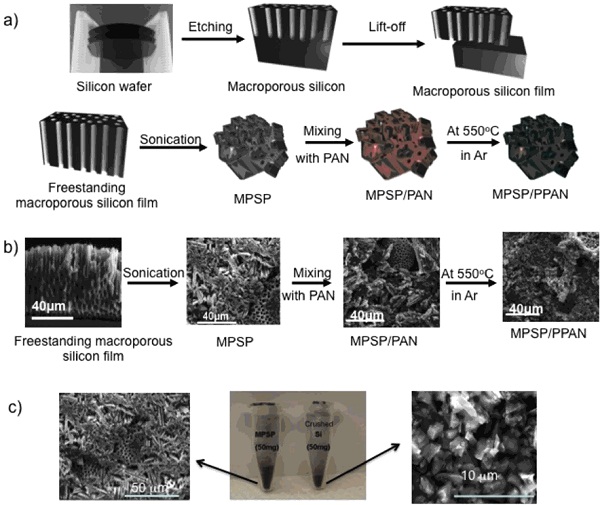
Рис. 4. Процесс получения нового анодного материала
Согласно подсчётам исследователей, по себестоимости новый анодный материал менее чем в два раза дороже графита. Учёные намерены продвигать свою разработку для коммерческого применения, хотя временные рамки прогнозировать пока не берутся.
Более детально о новом изобретении можно будет почитать в статье Inexpensive method for producing macroporous silicon particulates (MPSPs) with pyrolyzed polyacryolinitrile for lithium ion batteries, которая после восстановления пострадавших из-за урагана «Сэнди» серверов появится в онлайн-версии журнала Nature.
Исследователи из Корнелльского университета заявили о создании автономного летающего робота, который, по утверждению разработчиков, умеет так же умно преодолевать препятствия, как и птица. Это изобретение самостоятельно пробивается сквозь заросли, пролетает через тоннели, а в будущем может оказаться полезным в поисково-спасательных операциях.
В настоящее время компактные управляемые летающие аппараты для поисково-спасательных операций уже не редкость. Труднопреодолимой для них остаётся проблема обхода препятствий, таких как стены зданий, ветки деревьев. Оператор не всегда может успеть вовремя среагировать на внезапно возникший барьер. Кроме того, радиосигналы ограничивают область действия робота. Существующие решения, дающие роботам возможность автономно преодолевать препятствия, либо являются слишком тяжёлыми, либо потребляют много энергии, что не позволяет использовать их для летательных аппаратов.
Учёные под руководством профессора Ашутоша Саксены (Ashutosh Saxena) предложили технологию, которая позволяет эффективно определить препятствие, классифицировать его и выбрать оптимальный обходной манёвр. Система включает всего одну монокулярную камеру для обнаружения препятствий, за счет чего она остается лёгкой и компактной. Метод вычисления глубины изображения с использованием серии кадров является непригодным для летающего робота, так как камера сильно трясётся и результат получается неточным. Поэтому исследователи разработали специальный алгоритм, который по одному снимку, являющемуся входным параметром, определяет области изображения, на которых отображено препятствие. Для ознакомления робота с образцами препятствий предлагается использовать аппаратное решение на основе так называемой модели интегрирующих нейронов с утечкой и сети Маркова, которое, по сути, играет роль мозга. Реализация такой аппаратуры отличается высокой экономичностью — потребление энергии составляет всего 45 пикоджоулей на импульс.
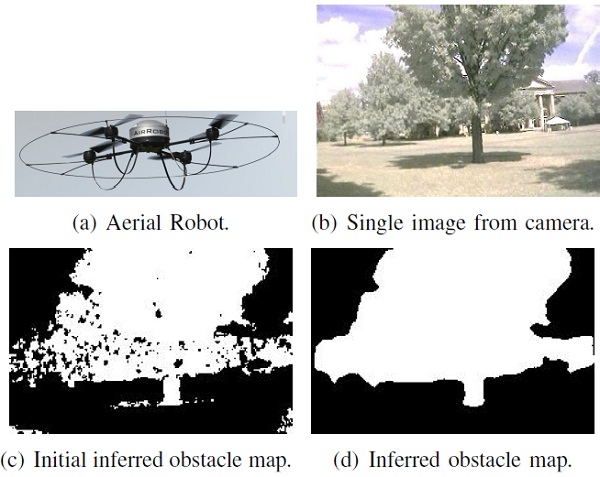
Рис. 5. Построение карты препятствия

Рис. 6. Построение карты одного и того же дерева в очень разных условиях освещения
Сложные теоретические выкладки можно изучить в докладе Low-Power Parallel Algorithms for Single Image based Obstacle Avoidance in Aerial Robots, прозвучавшем на конференции IROS 2012. А сейчас предлагаем практические результаты экспериментов готовой системы.
Набор данных состоял из 120 изображений кампуса Корнелльского университета. Окружающая среда включает четыре типа препятствий: деревья (на 63 изображениях), здания (на 45), фонарные столбы (на 10) и заборы (на 10). 80% этих изображений использовались для обучения робота и 20% — для тестирования. Так как аппаратное обеспечение для нейронной архитектуры ещё в процессе разработки, то для симуляции его работы был использован компьютер с программой MATLAB, который обменивался данными с роботом.
Летающий робот довольно успешно справился с задачей. В 53 экспериментальных ситуациях алгоритм показал стопроцентное определение препятствий. При этом только в двух случаях роботу не удалось их обойти. Единственные две ошибки исследователи объясняют коммуникационными задержками и «заносами» из-за сильных порывов ветра.