На позапрошлой неделе компания Intel пригласила журналистов в свой нижегородский офис, чтобы рассказать о новом продукте — средствах разработки для автономных автомобилей будущего, которые все вместе зовутся Intel Go Automotive SDK. Выбор места проведения мероприятия не случаен: отделение в Нижнем Новгороде — один из крупнейших центров разработок и исследований Intel, а занято оно в первую очередь созданием программного обеспечения. В том числе и компонентов, которые понадобятся для самоуправляемых машин: компилятора OpenCL для FPGA, софта для 5G-модулей, профилировщиков, ПО для разметки и обработки данных в ЦОД, библиотек и SDK для машинного обучения и ИИ, новых эффективных алгоритмов для всех этих задач и еще много чего другого, включая наработки для технологий VR, которые тоже важны для Intel.
✴-media" data-instgrm-captioned=" " data-instgrm-version="7">
В прошлом году Intel выкупила местную компанию Itseez, которая более 10 лет назад была основана выходцами из самой Intel . Она занимается созданием систем компьютерного зрения, а опытным пользователям знакома в качестве одного из ключевых разработчиков библиотеки OpenCV. Кроме того, Intel инвестирует во множество молодых компаний, занятых развитием технологий в упомянутых выше сферах. В нижегородском офисе также есть отдельная демолаборатория Интернета вещей, где студенты и преподаватели местных университетов могут вживую ознакомиться с новыми технологиями — есть доступ как к конечным устройствам, так и к отдельному облаку для обработки данных с датчиков. Эта же лаборатория помогает наладить работу различных групп внутри Intel и взаимодействие с бизнес-партнёрами компании.
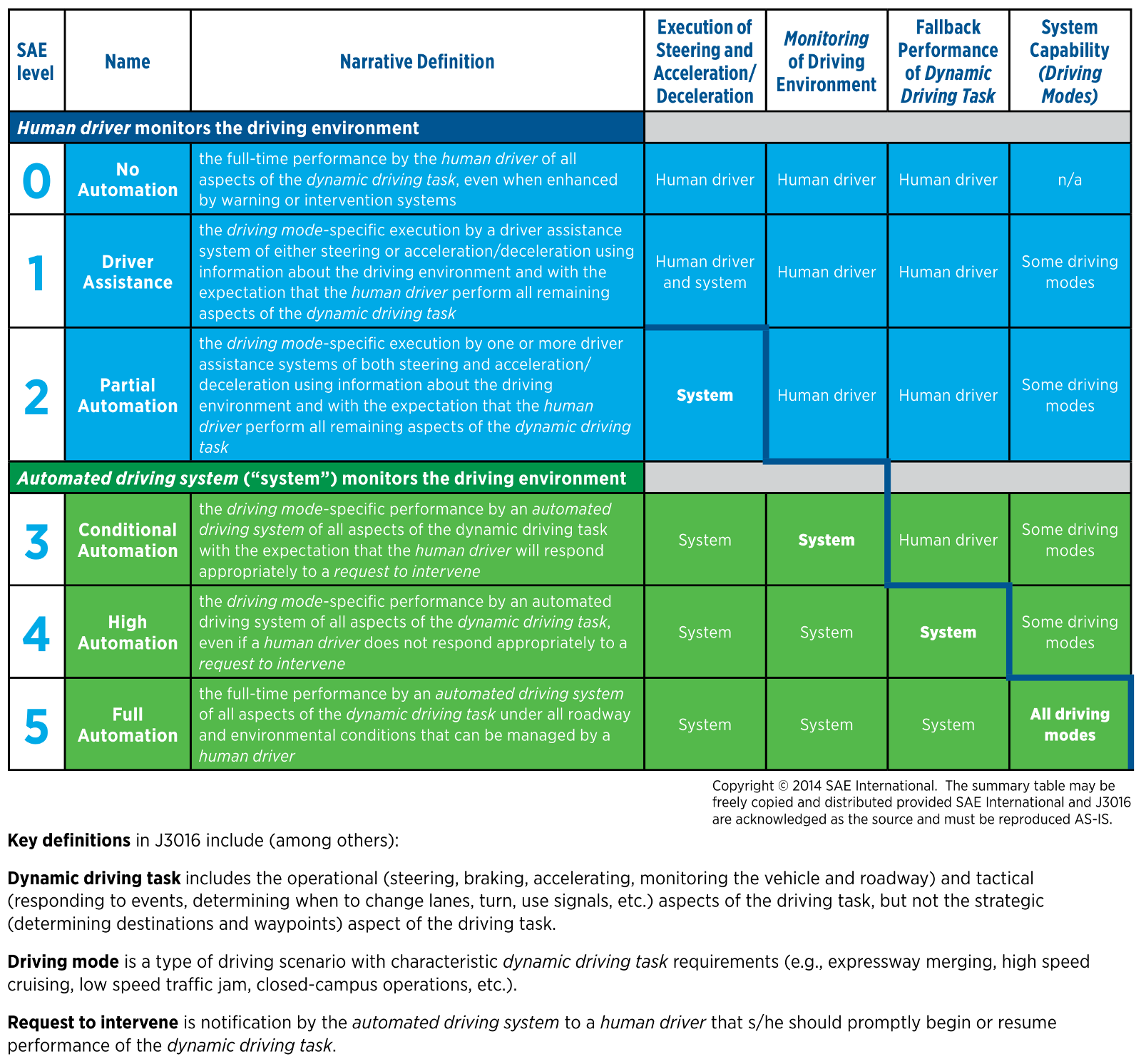
Собственно IoT — это новое и большое направление работы для самой Intel. Автономный транспорт тоже во многом относится к этой сфере, так как включает в себя всё тот же сбор данных со множества датчиков посредством современных каналов связи и обработку этих данных в дата-центрах, а затем и управление конечными устройствами. Буквально месяц назад Intel всё-таки приобрела MobilEye — разработчика компонентов автопилотирования транспорта. Решения этой компании, соответствующие второму уровню автономности (level 2) по версии SAE, давно используются крупными производителями. Ранее эта парочка уже стала партнёрами BMW, что, к слову, весьма позитивно сказалось на ее благосостоянии. Все вместе они планируют начать испытания робомобилей до конца года.
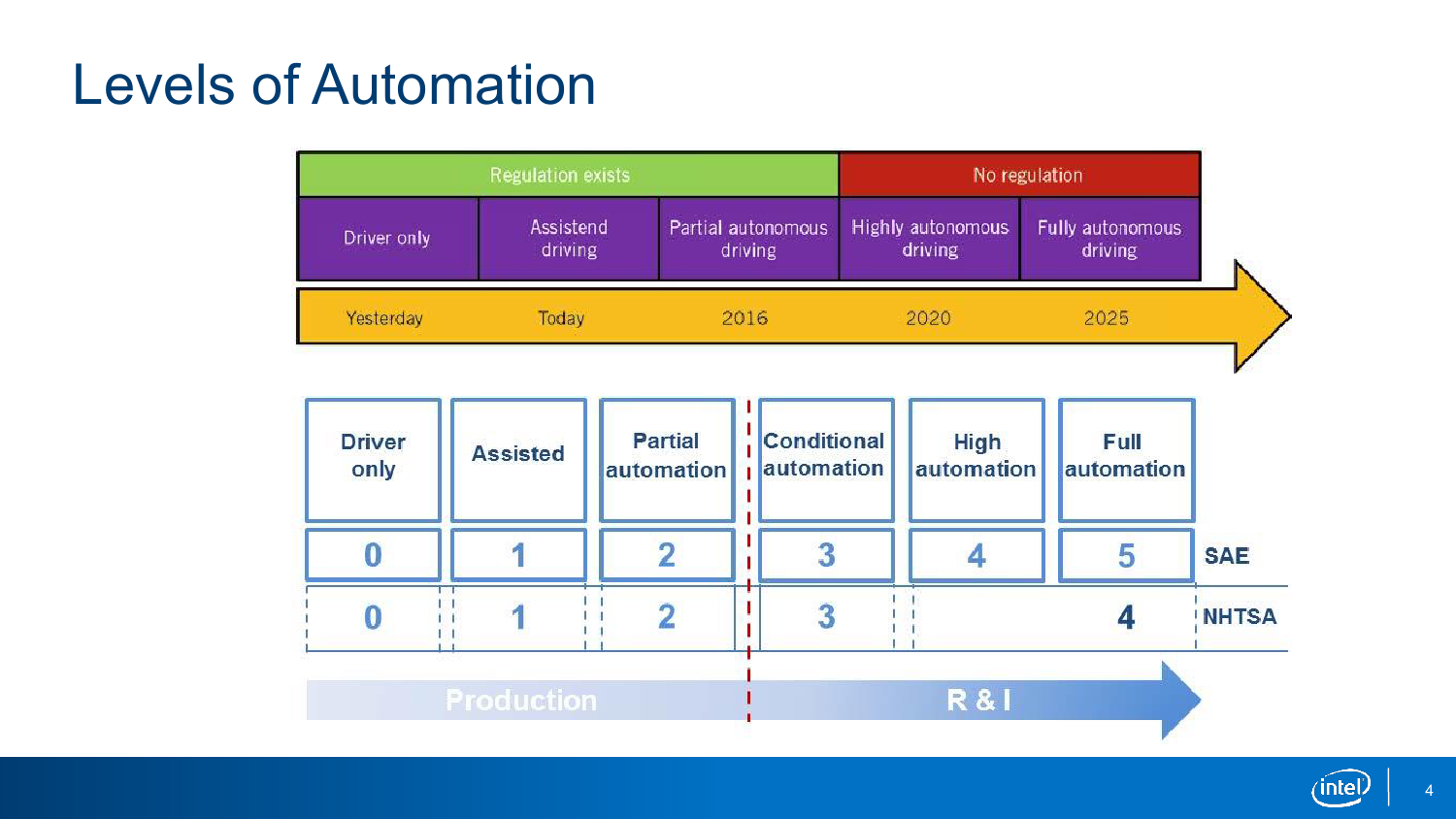
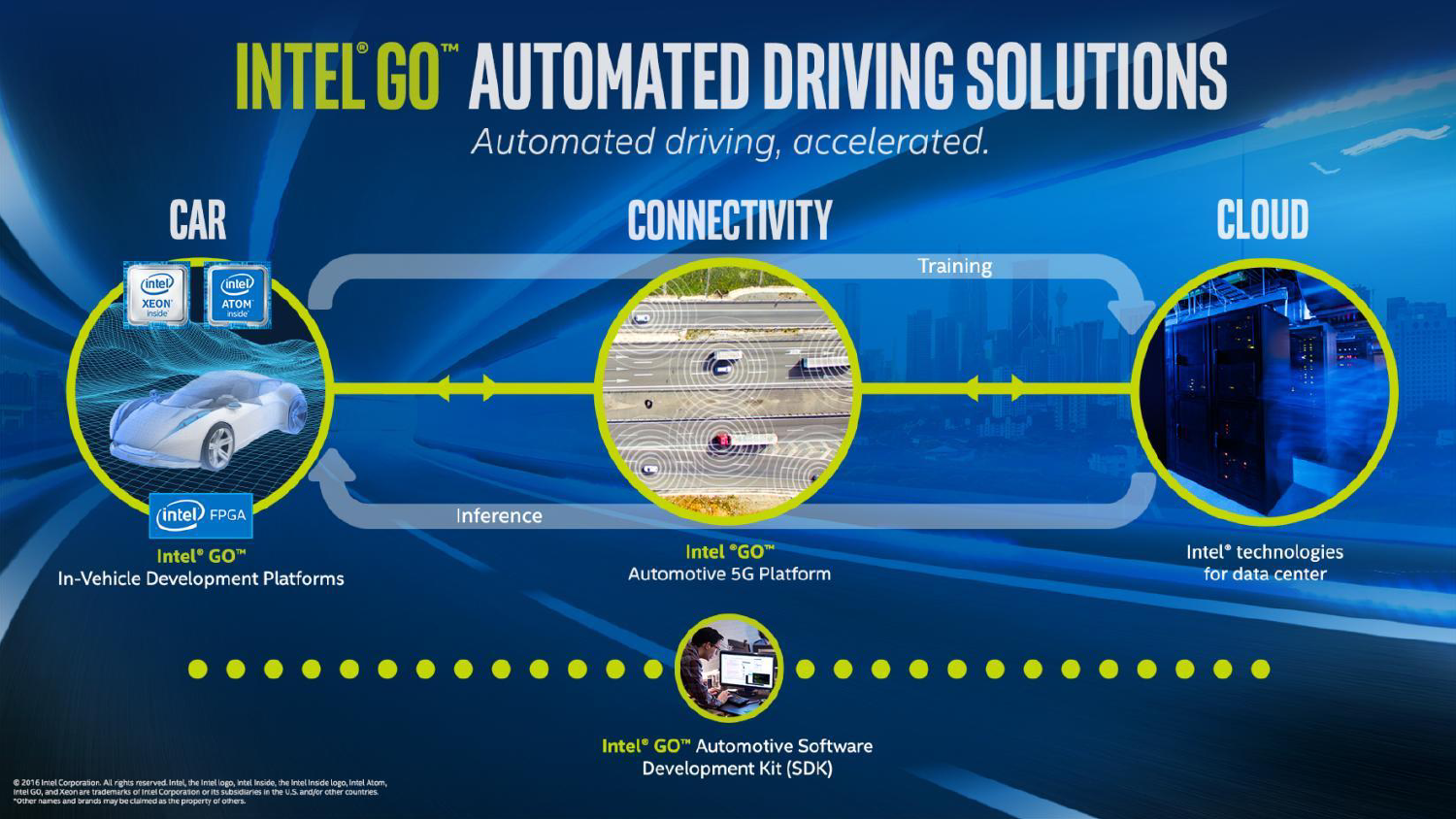
Всё это прекрасно соотносится с новой стратегией Intel на ближайшие годы. Впервые о работе над робомобилями компания заявила в прошлом году, причём не где-то, а на крупном автошоу. Чуть позже была создана специальная группа по разработке технологий для автономных транспортных средств: Automated Driving Group (ADG). В существующих автомобилях пока есть решения второго и третьего уровня, которые обеспечивают, например, адаптивный круиз-контроль и защиту от столкновений, но не способны полностью заменить человека. А вот проектами по разработке транспорта с 4-м и 5-м уровнем автономности, то есть такого, где участие человека в управлении практически не требуется, уже сейчас занимаются многие крупные IT-фирмы и все крупные автопроизводители. Преимущество Intel, по словам самой же компании, в том, что, во-первых, ее платформа гораздо более открыта во всех отношениях, а во-вторых, она предлагает комплексное решение, включающее в себя все элементы системы — от собственно компонентов автомобиля до алгоритмов обработки данных, которые находятся в дата-центрах.
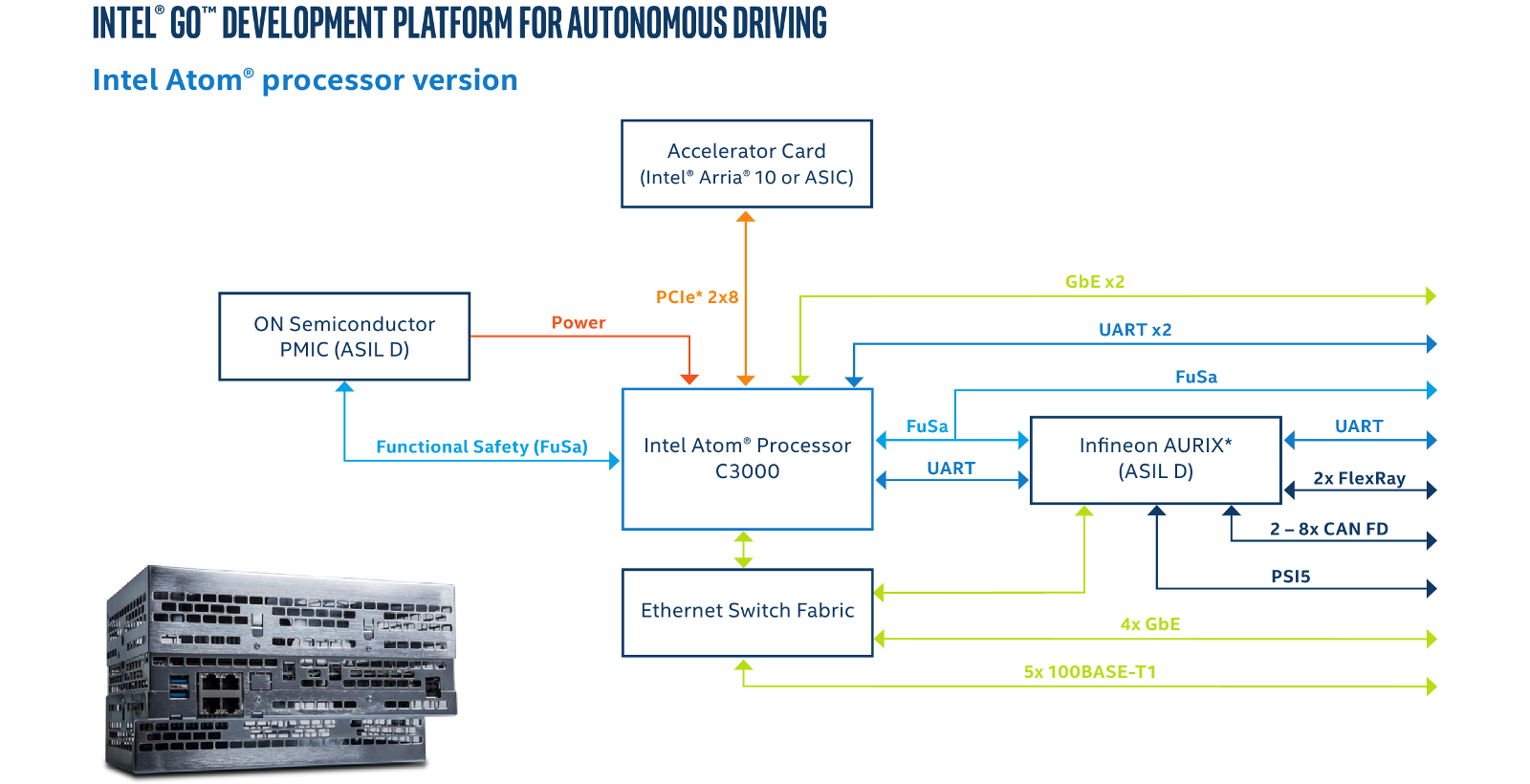
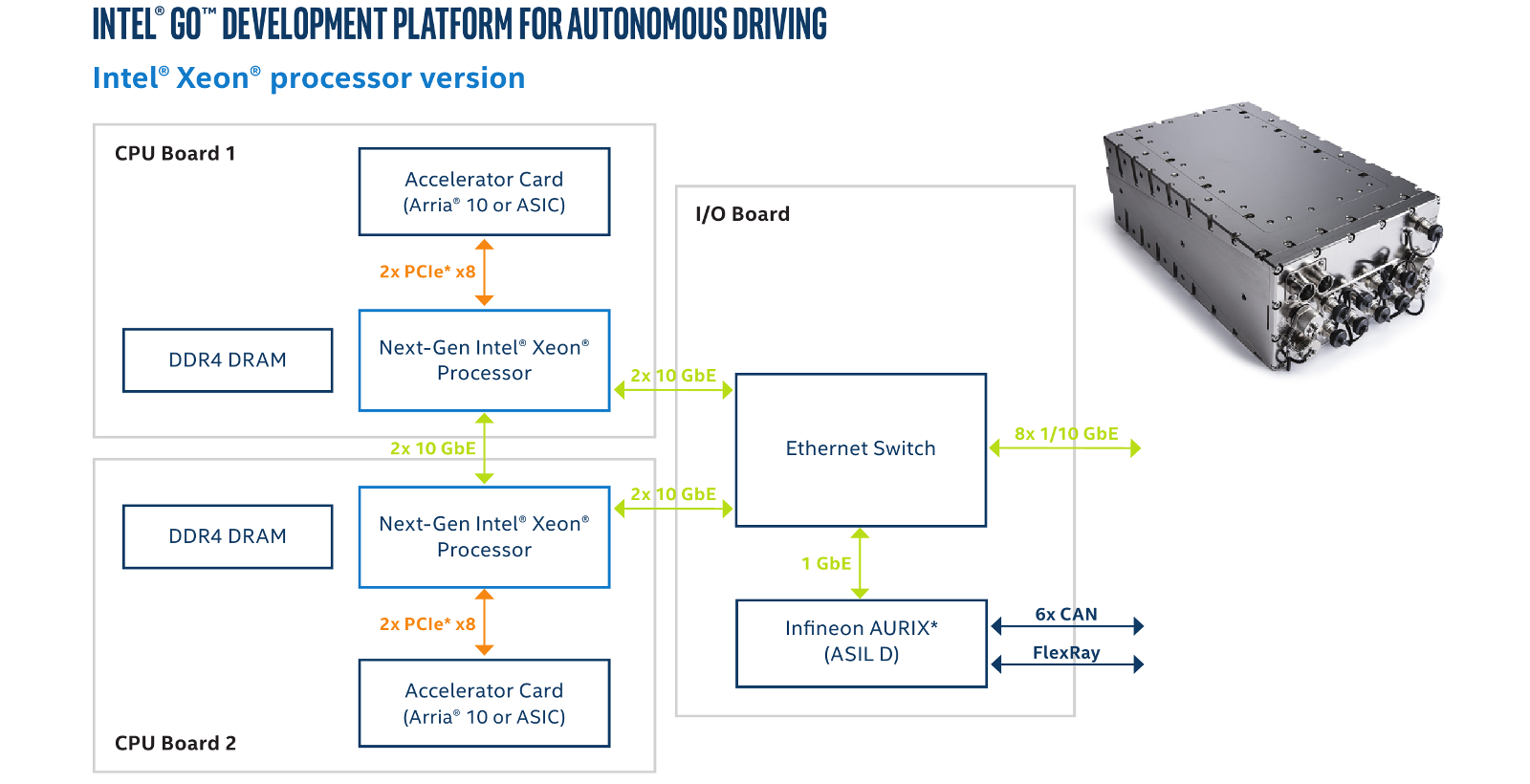
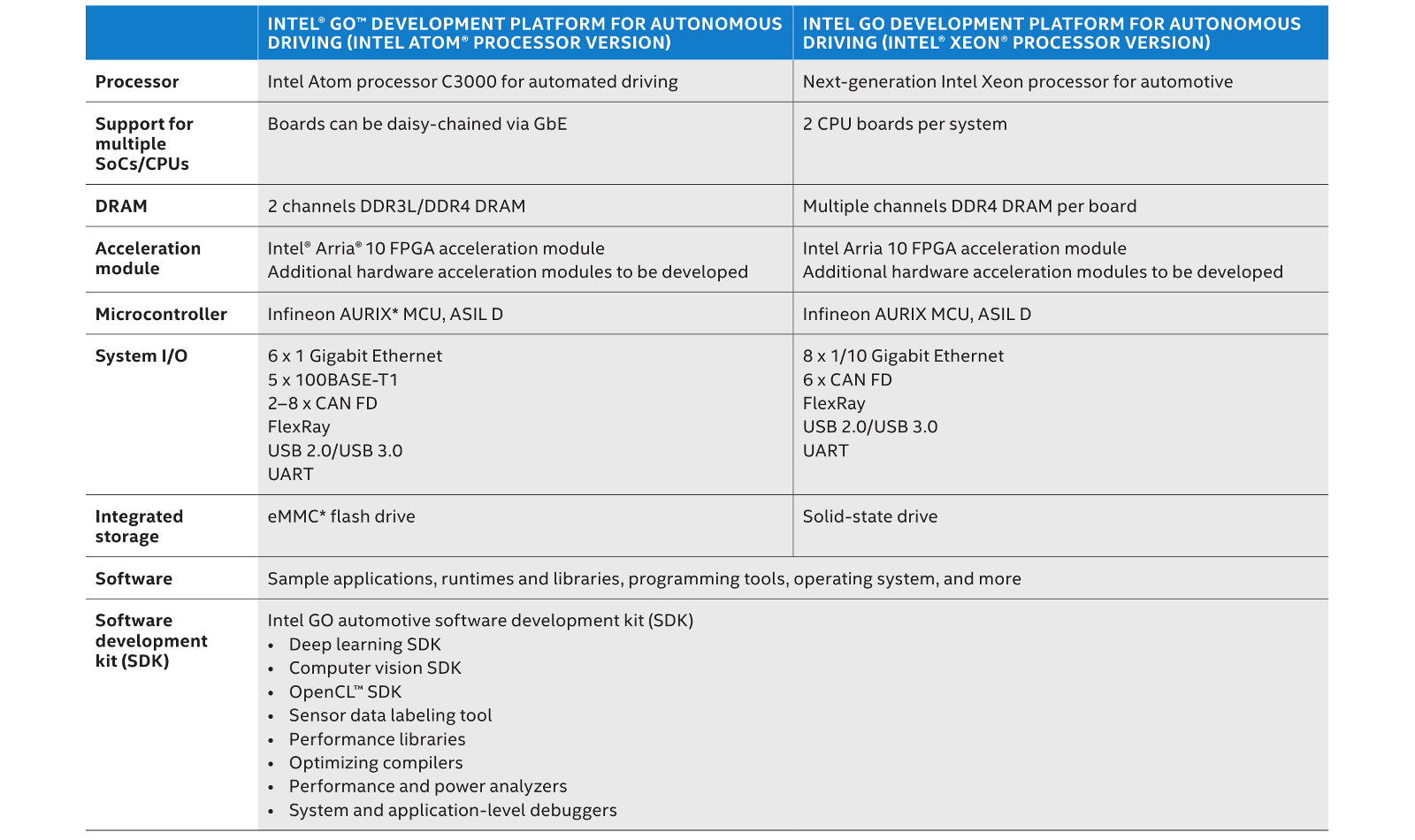
Для установки в автомобиль Intel предлагает две платформы в защищённом (в первую очередь физически) исполнении. Первая, более экономичная во всех смыслах, базируется на CPU серии Intel Atom C3000 и ускорителе — это может быть FPGA или ASIC. Производительности системы достаточно для обеспечения третьего уровня автономности и реализации некоторых функций четвёртого уровня. Более мощный вариант — для уровней 4 и 5 — использует два независимых блока, каждый с процессором Intel Xeon и подходящим ускорителем. Эта версия в дальнейшем получит отдельный блок для одновременного подключения до 12 камер с интерфейсом Gigabit Multimedia Serial Link (GMSL). В качестве основной шины используется Ethernet 1/10 Гбит/с, а наружу выводятся стандартные физические и программные интерфейсы. Компоненты платформ частично или полностью соответствуют промышленным стандартам безопасности AEC Q100 Grade 2 и ASIL C/D.

Для связи с внешним миром может использоваться 5G-модем с LTE-подключением в качестве запасного варианта. Пиковая скорость соединения может достигать 7 Гбит/с. Столь высокие показатели нужны не ради очередного рекорда — это насущная необходимость, так как в среднем автономный автомобиль, по оценкам Intel, будет генерировать в среднем 4 Тбайт данных в день! А на начальном этапе отладки и обучения системы этот показатель ещё выше — до 10-40 Тбайт в сутки. Столь большой объём данных берётся от различных датчиков авто, включая и стандартные компоненты отслеживания состояния машины, а также многочисленных систем для оценки обстановки вокруг автомобиля: сонаров, лидаров, радаров, акселерометров, камер различного разрешения и диапазона и так далее. В экстренных случаях, когда нужны максимально детальные сведения о ситуации, объём информации может быть ещё больше. Кроме того, в идеальном случае автомобиль обменивается данными (V2X) и с другими машинами, и с прочими объектами дорожной или в целом городской инфраструктуры.
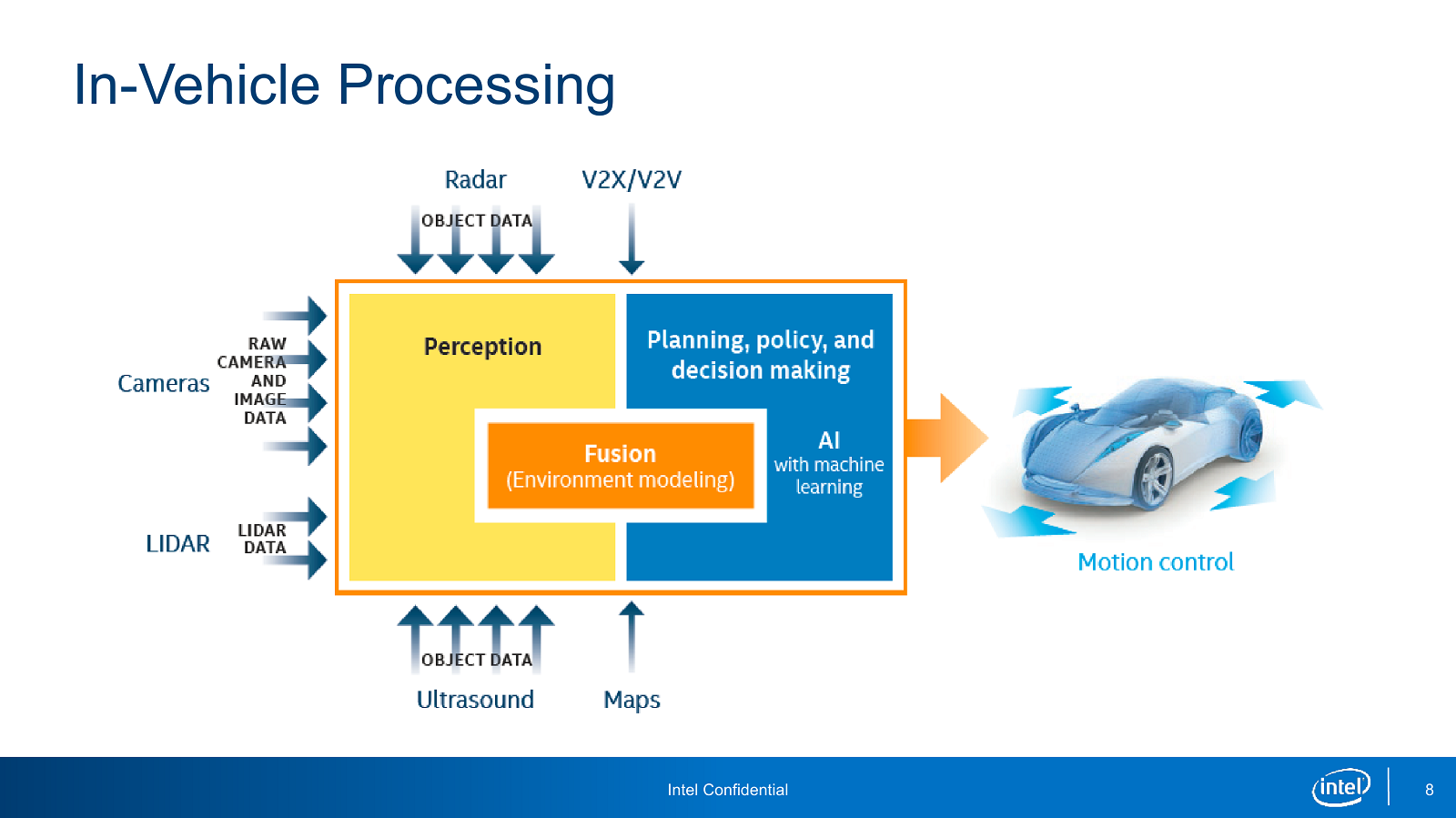
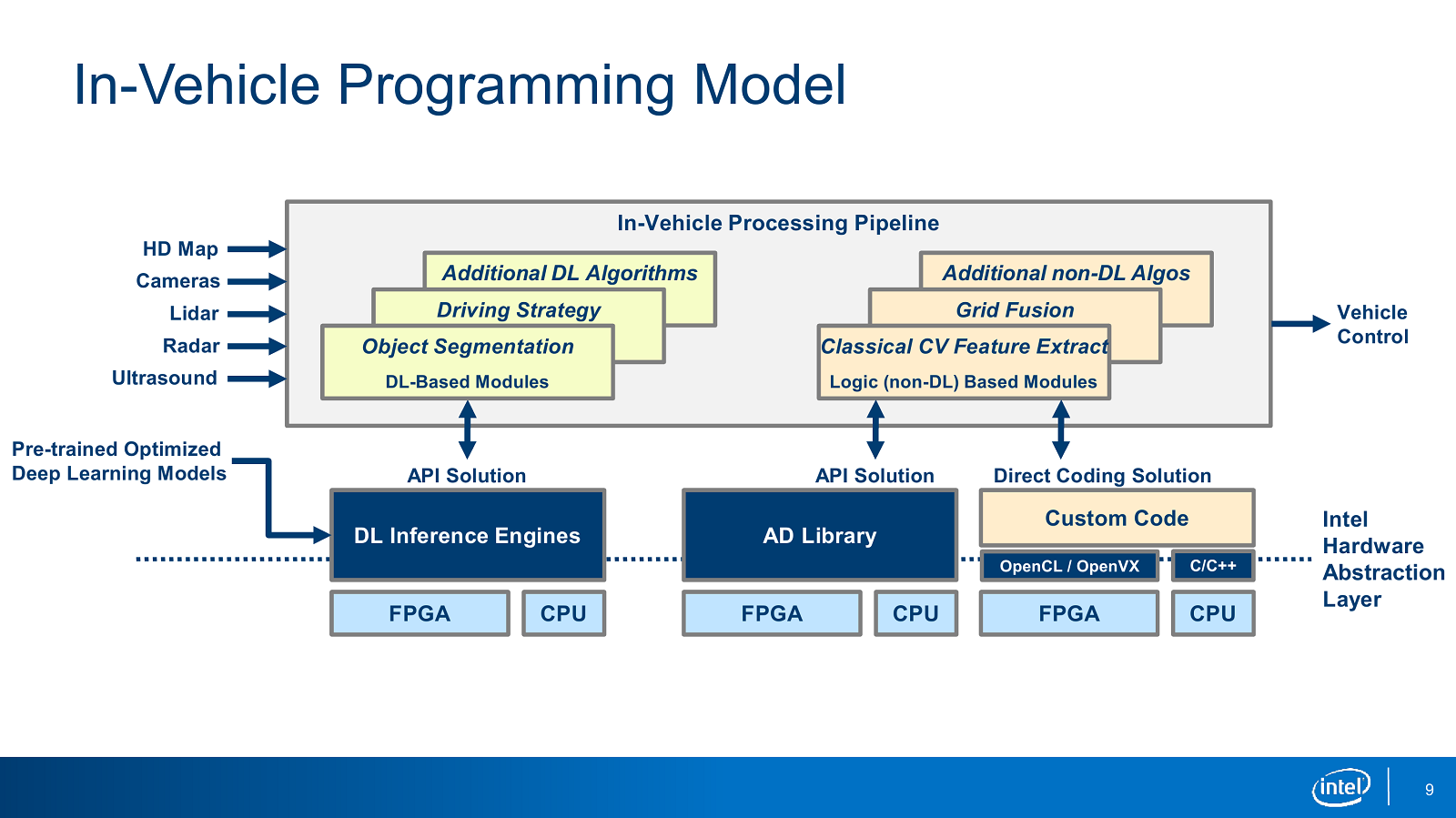
Собственно процесс управления состоит, грубо говоря, из трёх стадий. На первом этапе автомобиль собирает как можно больше сведений об окружающей обстановке. Причём для этого жизненно необходимы не только сведения с датчиков, но и крайне детальные — с точностью до сантиметра — карты. Об этом Intel тоже позаботилась, инвестировав средства в независимую (во всяком случае, от других гигантов) и хорошо известную картографическую платформу Here. На втором этапе на основе этих сведений строится модель окружающего пространства, а на третьем происходит выработка решения о необходимости того или иного действия. Всё это происходит непосредственно внутри автомобиля. Intel предлагает готовые инструменты и шаблоны для таких моделей, но ничто не мешает заказчику самостоятельно «подогнать» платформу под свои задачи. Тем более что для специфических задач можно использовать FPGA или ASIC, а базовые функции и так доступны всем пользователям.
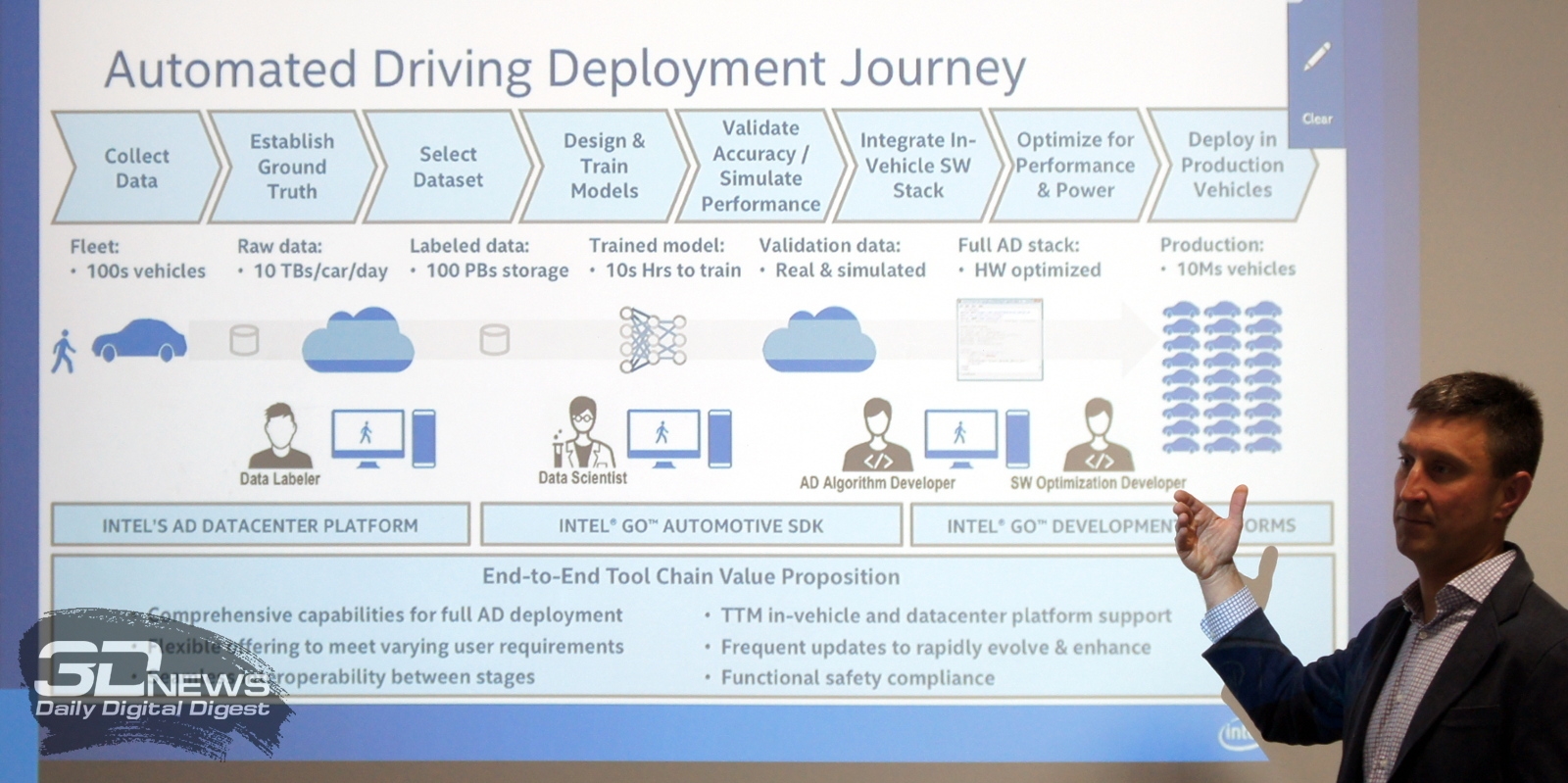
Однако аппаратная и программная часть бесполезны без того, что сейчас принято называть ИИ. И для его разработки у Intel, конечно, тоже есть инструменты. Первая и, пожалуй, самая трудоёмкая часть — это разметка данных (что есть что), полученных от упомянутых выше датчиков. Делается она в ручном и полуавтоматическом режиме. На выходе получается более-менее достоверная модель окружающего пространства. На основе этой модели создаются и корректируются различные сценарии поведения авто в различных же ситуациях. Часть из них впоследствии проверяется на реальных машинах, а некоторые ситуации симулируются, так как никому не хочется, например, в реальной жизни создавать аварию где-нибудь на оживлённой трассе. Отдельным этапом идёт оптимизация моделей и сценариев, чтобы они одновременно были и практически полезными, и в то же время не слишком требовательными к вычислительным ресурсам, то есть энергоэффективными. А на финальном этапе всё это оптимизируется под конкретную аппаратную платформу, устанавливаемую в авто. Кроме того, все компоненты системы должны пройти проверку на соответствие стандартам функциональной безопасности (functional safety, ISO 26262).
Скоро сказка сказывается, да не скоро дело делается. За этим — весьма поверхностным, надо признать, — описанием процесса скрываются миллионы километров тестовых заездов, сотни петабайт собранных данных, бессчётные часы работы инженеров и учёных. И всё это делается не один раз (и навсегда), а повторяется и повторяется — потому что сразу предусмотреть все возможные режимы вождения и ситуации попросту невозможно. Да и в целом попробуйте представить себе масштабы: под каждую конкретную страну или даже город либо местность будет создаваться собственная модель, в том числе с учётом поведения реальных водителей в этом месте. Всё это хорошо показывает, насколько любые неестественные «интеллекты» далеки от того, что создано природой. Ведь даже подростки (в ряде стран) вполне успешно сдают экзамены на получение водительских прав.
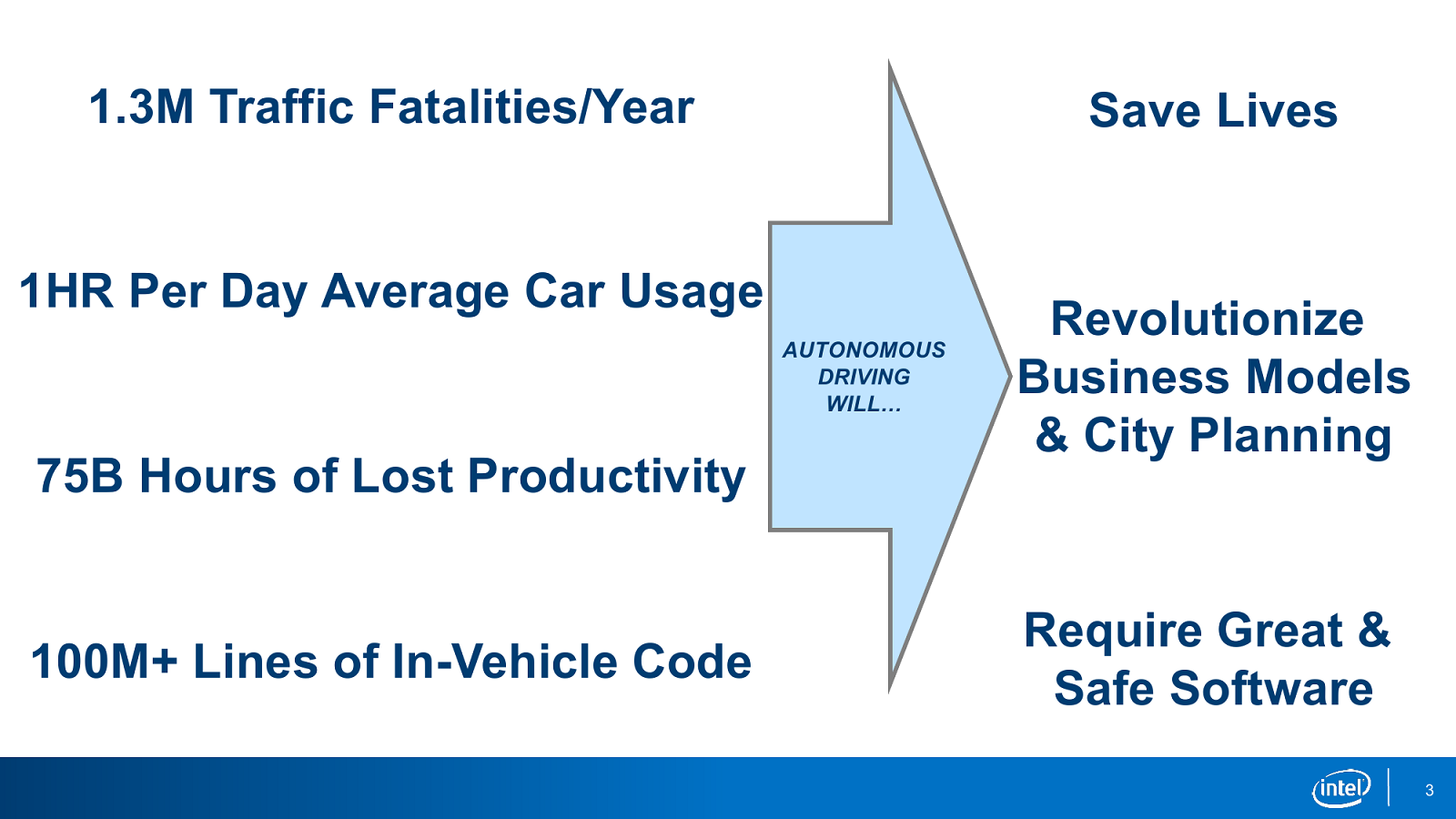

Ну хорошо, мы уже поняли, что Intel предлагает целостную, достаточно открытую платформу для разработки автономного транспорта, охватывающую весь цикл создания программно-аппаратных компонентов — от «железа» в автомобиле до вычислений в облаке. Остался один, самый важный вопрос: а нужно ли нам это вообще? Могут ли нам чем-то помочь робомобили? Очевидно, что первым на ум приходит заметное повышение безопасности — сейчас в мире на дорогах ежегодно погибает более миллиона людей, а человеческий фактор всё ещё остаётся одной из главных причин таких событий – более 90 % аварий происходит по вине водителей. В конечном итоге это выливается в миллиарды долларов ущерба, а машины становятся только дороже и тяжелее (в среднем на 4 % по обоим параметрам) из-за необходимости добавления систем защиты. При этом возможно значительное изменение дорожной инфраструктуры, которой будут пользоваться только автономные машины. Им не нужны светофоры, разметка, указатели и прочие аудиовизуальные средства, предназначенные для восприятия человеком.
А теперь представьте всё то же самое, но в масштабе города и с автомобилями вместо тележек
Ещё одна глобальная проблема — это весьма заметные временные затраты не столько на поездку, сколько на стояние в пробках, на поиск парковки и так далее. В США на это уходит около 75 млрд человеко-часов ежегодно. При всём при том фактически частные автомобили используются в среднем только 5 % времени и по большей части простаивают на парковке или в гараже. Как ни странно, в густонаселённых районах городов пробки образуются в том числе из-за рыщущих по округе в поисках парковочного места водителей. А если автомобиль, высадив человека в нужном месте, сам отправится на стоянку или же будет использоваться ещё для каких-то нужд? Вообще говоря, уже давно придуманы термины, описывающие такие преобразования в жизни: уберизация (uberisation) экономики и, в более широком смысле, экономика совместного использования (шеринговая, sharing economy).

Все эти примеры и цифры взяты как из рассказа представителей Intel, так и из замечательной статьи Cars and second order consequences (букв. «Автомобили и последствия второго порядка») Бенедикта Эванса (Benedict Evans) — сотрудника известного венчурного фонда a16z, владеющего акциями крупнейших IT-компаний. В ней говорится и о многих других явлениях возможного будущего: о размытии границ между частным и публичным транспортом, потому что поездка на каршеринговом робомобиле будет очень дешёвой; об изменении цен на недвижимость и ее типа, потому что необходимость в собственных парковках у зданий отпадёт, а они существенно увеличивают себестоимость строительства; о переделе рынка продуктов и товаров, потому что логистика и транспортировка кардинально поменяются; и даже о смене деятельности полиции, ведь авто с кучей камер — суть настоящий соглядатай. Ну и как вам такое будущее середины XXI века?