|
Опрос
|
реклама
Быстрый переход
Слабонервным не смотреть: японцы создали анатомически точную копию робопса с мышцами и без кожи
01.01.2026 [11:40],
Геннадий Детинич
Все ведущие разработчики четвероногих роботов для приведения в действие конечностей робопсов сделали ставку на электродвигатели и добились успехов в подвижности и манёвренности таких платформ. Между тем настоящая анатомия людей и животных миллионы лет приспосабливалась для движения на иных принципах и у роботов есть чему у неё поучиться. Мышечная система гибче и более универсальна, что также может помочь в развитии роботизированных систем. 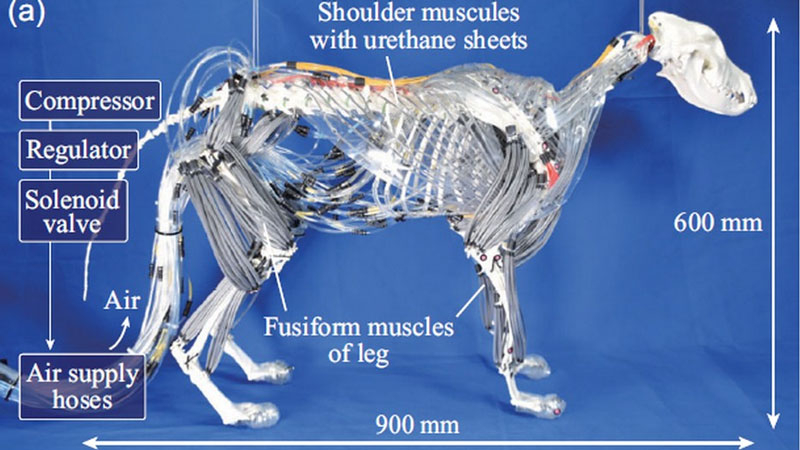
Источник изображения: Advanced Robotics Research 2025 Интересное решение для имитации мышц более 70 лет назад придумал Джозеф Маккибен (Joseph McKibben). Его разработка была создана для ортопедии и хорошо легла на задачи робототехники. Актуаторы или пневматические приводы Маккибена представляют собой эластичные трубки в жёсткой оплётке, которая не даёт им много свободы, но зато имитирует сокращение мышц при закачке в трубки воздуха или жидкостей. Японские инженеры воспользовались этим и максимально точно воспроизвели анатомию конечностей собаки, чтобы обеспечить роботу передвижение. 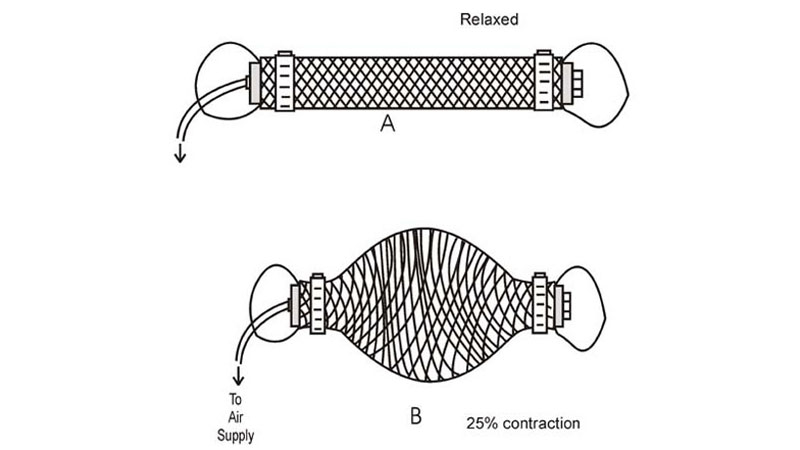 Особое внимание разработчики уделили воспроизведению строения плечевого пояса: как и у настоящей собаки, конечности в этом роботе соединены с туловищем исключительно мышцами, без суставов. Со стороны это выглядит жутко — словно с настоящего животного живьём содрали кожу, но прототип уже продемонстрировал устойчивое движение по прямой. В конструкции японского прототипа использовано 48 пневматических искусственных мышц: по 15 на каждую переднюю конечность и по 9 — на задние. Поскольку передние лапы прикреплялись к туловищу только за счёт мышц, это увеличило подвижность и длину шага. Однако отсутствие пассивных стабилизирующих структур, таких как суставные сумки и связки, не позволяет роботу самостоятельно удерживать вес своего тела. Поэтому на испытаниях он передвигался, опираясь на вспомогательную тележку, хотя последовательность активации мышц и характер движений были довольно близки к естественным. Планы дальнейшей работы включают создание суставных элементов и мягких тканей, что позволит роботу отказаться от тележки и полноценно двигаться. Также инженеры намерены оптимизировать пневмосистему для ускорения реакции мышц и повышения скорости ходьбы. Подобные мускульно-скелетные роботы важны не только для робототехники, но и для биомедицинских исследований: они могут помочь в изучении двигательных возможностей животных и при создании «естественных» протезов. Добавим, не так давно польский стартап Clone Robotics показал анатомически точно воспроизведённого человекоподобного робота. Выглядит он не менее жутко, чем японский робо-пёс. Но может быть это настоящее будущее робототехники? |
© 1997—2026 Электронное периодическое издание "3ДНьюс" | Свидетельство о регистрации СМИ Эл ФС 77-22224
выдано Федеральной Службой по надзору за соблюдением законодательства в сфере массовых коммуникаций и охране культурного наследия
При цитировании документа ссылка на сайт с указанием автора обязательна. Полное заимствование документа является
нарушением
российского и международного законодательства и возможно только с согласия редакции 3DNews.








 MWC 2018
MWC 2018 2018
2018 Computex
Computex