
Опрос
|
реклама
Быстрый переход
Почти как Усэйн Болт: в Китае создали самого быстрого человекоподобного робота в мире
04.02.2026 [11:55],
Геннадий Детинич
Китайские разработчики из Института человекоподобных роботов при Чжэцзянском университете (Zhejiang University) совместно с компаниями MirrorMe Technology и Kaierda представили полноразмерного человекоподобного робота под названием Bolt. Робот, названный в честь легендарного спринтера Усэйна Болта, разогнался до 10 м/с (36 км/ч), что стало новым мировым рекордом среди антропоморфных роботов. 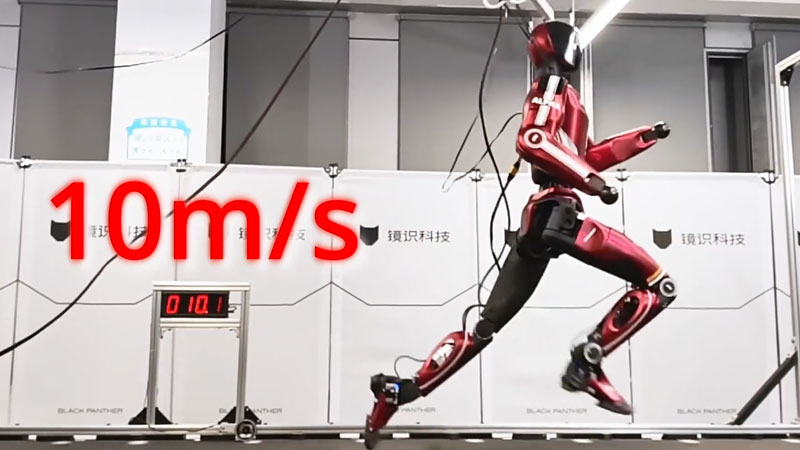
Источник изображений: Zhejiang University Робот Bolt наделён человеческими пропорциями и массогабаритными характеристиками людей: при росте 175 см его вес составляет 75 кг. В своё время спринтер Усэйн Болт пробежал сто метров за 9,58 секунды с максимальной скоростью около 10,44 м/с. Робот немного не дотянул до этого результата, но явно мог бы поддерживать эту скорость условно бесконечно в отличие от человека. Собственно, во время демонстрации на беговой дорожке человек вскоре выдохся, тогда как машина продолжала бежать в максимальном темпе. Впрочем, новая разработка не предназначена только для установления рекордов. Разработчики ставили перед собой цель создать роботизированную человекообразную платформу, максимально точно воспроизводящую пластику людей и при этом способную сравняться с человеком или даже превзойти его. Пока эта машина бегает на привязи на стенде. В будущем она сможет принять участие в спасательных операциях, использоваться как спарринг-партнёр для тренировки спортсменов и во многих других областях, где нужно уверенно стоять на ногах и сохранять манёвренность и баланс корпуса. Одним словом — чувствовать себя среди людей своим.  В Пекине прошёл первый в мире полумарафон с участием людей и роботов
19.04.2025 [13:45],
Владимир Мироненко
В субботу в пекинской зоне технико-экономического развития «Ичжуан» прошёл первый в мире полумарафон, в котором наряду с людьми приняли участие роботы. В забеге на дистанцию в 21 км к тысячам бегунов присоединился 21 человекоподобный робот. В Китае и до этого проводились забеги для роботов, но это был первый совместный полумарафон для людей и роботов, отметило агентство Reuters. 
Источник изображения: CGTN Как пишет «РИА Новости», основным условием для участия в забеге для роботов была человекоподобная конструкция и способность перемещаться на двух ногах без использования колесных приспособлений. В отличие от людей, стартовавших вместе, роботы начинали забег по очереди с разницей в одну минуту, и для них была выделена отдельная полоса. В забеге роботов сопровождали «тренеры»-разработчики, поскольку условиями состязаний допускалось как полностью автономное управление, так и ручное дистанционное. Согласно правилам, роботам было разрешено заменять батареи. Также при необходимости можно было менять самих роботов — в эстафетном формате, но за каждую замену должен начисляться штраф в 10 минут. При этом роботы должны были строго следовать указанному маршруту и всем техническим правилам, а также не должны были повредить трассу или нанести вред своим роботам-соперникам и людям. Общая продолжительность работы роботов-бегунов составила примерно 3 часа 30 минут. Роботы от китайских производителей, таких как DroidVP и Noetix Robotics, были разных форм и размеров: некоторые ниже 120 см, другие высотой в 1,8 м. Один из роботов начал забег с падения плашмя на стартовой линии, но, пролежав несколько минут, всё же начал движение. Другой через несколько метров врезался в перила, из-за чего сопровождавший его разработчик тоже упал. Первым среди роботов завершил забег Tiangong Ultra с результатом 2 часа 40 минут 42 секунды, с отрывом от ближайшего соперника почти на час. Среди людей-бегунов лучшее время у мужчин составило 1 час 2 минуты 36 секунд, у женщин — 1 час 11 минут 7 секунд. Робот Tiangong Ultra весом около 55 кг и высотой 1,8 м в ходе забега передвигался со скоростью 7–8 км/ч, хотя может развивать скорость до 12 км/ч. Он получил денежный приз в размере 5 тысяч юаней (около $700), призы серебряному и бронзовому медалистам составили 4000 ($560) и 3000 юаней ($420) соответственно. Приз роботу-победителю вручил другой робот-гуманоид. |
© 1997—2026 Электронное периодическое издание "3ДНьюс" | Свидетельство о регистрации СМИ Эл ФС 77-22224
выдано Федеральной Службой по надзору за соблюдением законодательства в сфере массовых коммуникаций и охране культурного наследия
При цитировании документа ссылка на сайт с указанием автора обязательна. Полное заимствование документа является
нарушением
российского и международного законодательства и возможно только с согласия редакции 3DNews.








 MWC 2018
MWC 2018 2018
2018 Computex
Computex



