|
Опрос
|
реклама
Быстрый переход
Ровер Curiosity обнаружил на Марсе огромное поле из неправильных сот — а неправильных пчёл не нашёл
30.07.2026 [12:57],
Геннадий Детинич
Марсоход NASA Curiosity обнаружил в кратере Гейла обширный участок поверхности, покрытый небольшими многоугольными структурами, напоминающими пчелиные соты. Ранее ровер находил подобные образования, но новая находка по масштабам затмила все предыдущее такие открытия. 
Источник изображений: NASA «Мы видели множество захватывающих пейзажей глазами Curiosity, но от этого моря полигонов [сот] у нас захватило дух, — сказал научный сотрудник миссии Эшвин Васавада (Ashwin Vasavada) из Лаборатории реактивного движения NASA в Южной Калифорнии. — Мы тщательно измерили их форму и химический состав и надеемся, что в полученных данных есть подсказки о том, как они сформировались». Необычный рельеф обнаружился в долине, получившей неофициальное название Valle Grande, по которой аппарат поднимается по склонам горы Шарп. Размер отдельных ячеек составляет примерно 4–8 см. Подобные структуры Curiosity встречал и раньше, однако впервые они образуют практически непрерывное поле, уходящее за пределы видимости марсохода. Масштаб находки стал очевиден после получения круговой панорамы, снятой камерами Curiosity 19 и 20 июня 2026 года. Полигональная сетка из похожих на соты структур покрывает не только относительно ровную поверхность, но и склоны расположенного рядом шестиметровой скалы Miraflores, вершина которой покрыта толстым слоем песка. С орбиты этот участок выглядел светлым и сравнительно гладким, поэтому плотность и сохранность мелких геометрических деталей оказались неожиданными для исследователей. 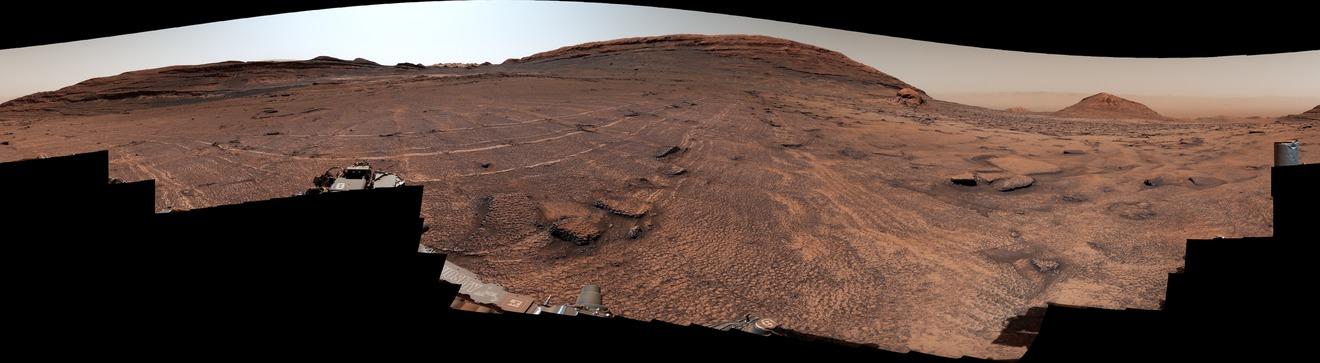 Для изучения полигонов, как называются подобные образования, специалисты задействовали несколько приборов марсохода. Камера MAHLI на роботизированной руке получила увеличенные изображения гребней и внутренних частей ячеек, а рентгеновский спектрометр APXS измерил содержание химических элементов непосредственно на поверхности пород. Лазерный комплекс ChemCam провёл свой спектроскопический анализ: импульсы лазера испаряли микроскопические участки материала, после чего спектрометры определяли состав образовавшейся плазмы. Замеры выполнялись отдельно на выступающих границах полигонов и в их центрах, что позволит выяснить, различаются ли эти участки по составу и происхождению.  Однозначного объяснения происхождения марсианских «сот» пока нет. Некоторые ранее найденные полигоны оказались следствием трещин в поверхности при высыхании, возникавшими в насыщенном водой иле, однако похожий рисунок также мог сформироваться при многократном нагревании и охлаждении пород либо при их уплотнении под слоями осадков, когда из материала выдавливалась вода. Определение механизма важно для реконструкции условий, существовавших миллиарды лет назад у подножия горы Шарп, где Curiosity уже обнаружил свидетельства существования древних озёр и ручьёв, а также химическую среду, потенциально пригодную для микробной жизни. NASA показало завораживающий таймлапс Марса, снятый зондом «Психея»
20.07.2026 [13:24],
Владимир Фетисов
Космический аппарат Национального управления по аэронавтике и исследованию космического пространства (NASA) США «Психея» (Psyche) благополучно движется к своей цели в поясе астероидов вблизи Юпитера. В мае зонд облетел Марс по орбите планеты для получения гравитационного ускорения. Теперь же аэрокосмическое агентство опубликовало таймлапс-видео, которое было создано из снимков, сделанных во время сближения с Красной планетой. 
Источник изображения: NASA/JPL-Caltech/ASU За время полёта вблизи Марса зонд сделал тысячи снимков поверхности планеты, которые и стали основой для опубликованного видео. Специалисты NASA объединили эти снимки, тем самым создав захватывающее видео встречи зонда с Красной планеты, начиная от сближения и заканчивая ледяным южным полюсом, который удалось запечатлеть при отлёте. «Камера сработала блестяще и позволила получить снимки Красной планеты, которые удаётся увидеть крайне редко», — заявил Джим Белл (Jim Bell), руководитель команды по работе с камерой аппарата «Психея» в Университете штата Аризона. Аппарат начал сближение с Марсом 2 мая, а максимально приблизился к планете 15 мая. Облёт Марса по орбите планеты дал зонду прирост скорости и скорректировал его траекторию, позволив направиться к цели сэкономив топливо, которое пригодится в длительном путешествии. Ожидается, что «Психея» достигнет одноимённого астероида в 2029 году. «Помимо очевидной красоты фотографий, мы также смогли проверить калибровку камеры и чувствительность к рассеянному свету», — добавил Белл. Ровер Perseverance одолел марафонскую дистанцию на Марсе — на это ушло 5 лет и 4 месяца
29.06.2026 [18:42],
Сергей Сурабекянц
14 июня 2026 года марсоход NASA Perseverance преодолел расстояние, эквивалентное олимпийской марафонской дистанции, проехав 42,2 километра. Почти пять с половиной лет после посадки на дно древнего озера в кратере Езеро в 2021 году марсоход исследует Марс, отбирает пробы и передаёт учёным информацию о Красной планете. 13 июня орбитальный аппарат Mars Reconnaissance Orbiter запечатлел Perseverance на финишной прямой. 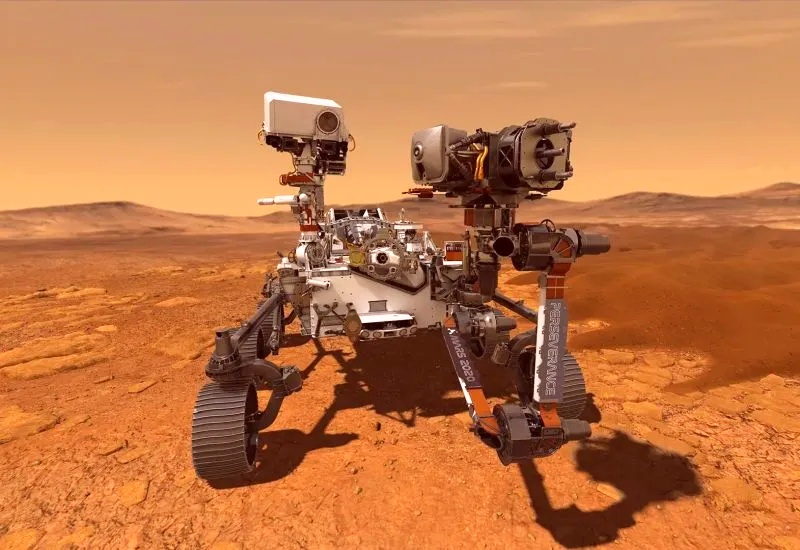
Источник изображений: NASA Конечно, на снимке с орбиты марсоход едва заметен, но эта дополнительная точка обзора позволяет исследователям оценить роботизированного исследователя Марса «свежим взглядом». Ранее NASA опубликовало автопортрет марсохода, собранный из 61 отдельного кадра, полученного камерой, установленной на роботизированном манипуляторе аппарата. Хотя пересечение финишной черты марсианского марафона — захватывающее достижение, Perseverance сделал гораздо больше, чем просто преодолел это впечатляющее расстояние. Марсианский ровер собрал невероятное количество изображений, данных и образцов марсианского грунта. В частности, при помощи радиолокационного визуализатора Perseverance за 78 проходов общей протяжённостью 6,1 км собрал данные на глубине до 35 метров и обнаружил древнюю дельту реки, залегающую глубоко под поверхностью Марса.  В прошлом году наблюдения, проведённые с помощью марсохода, выявили наиболее убедительную из возможных биосигнатур, обнаруженных на планете. Год назад учёные сообщили, что Perseverance обнаружил надёжные доказательства существования на Марсе жизни в древности. Новый анализ образцов из той же местности подтвердил ранее сделанные выводы — на Марсе миллиарды лет назад в самом деле могла существовать органическая жизнь, поскольку в то время климат на планете был похож на нынешний земной. В 2015 году марсоход NASA Opportunity также успешно преодолел марафонскую дистанцию на Красной планете, но у него на это ушло более 11 лет. Теперь у нас есть новый чемпион марсианского марафона! Учитывая успехи Perseverance, не исключено, что ему покорится и ультрамарафонская дистанция в 100 км. Марсианские породы содержат сложную органику, подтвердил марсоход NASA Perseverance
25.06.2026 [09:49],
Геннадий Детинич
Высадка марсохода NASA Perseverance в кратере Езеро давала максимально возможные шансы найти признаки биологической жизни на Красной планете. На древнем Марсе в этом месте могло быть озеро, в осадках на дне которого должны были остаться следы былой микробной жизни. И такие следы нашлись. 
Источник изображения: NASA Год назад по результатам одной находки учёные заключили, что Perseverance наконец обнаружил самые надёжные доказательства существования на Марсе жизни в древности. Новый анализ образцов из той же местности подтвердил ранее сделанные выводы — там действительно есть сотни сложных органических молекул на основе углерода. На Марсе миллиарды лет назад в самом деле могла существовать органическая жизнь, поскольку в то время климат на древнем Марсе был похож на земной. Сложные молекулярные соединения углерода — так называемые макромолекулы, являющиеся основой живых организмов на нашей планете, — обнаружены в двух образцах аргиллитов — окаменевших илистых отложений. Анализ был проведён с помощью инструмента SHERLOC — спектрометра на роботизированной руке марсохода, использующего рамановскую и люминесцентную спектроскопию для определения минералов и органики на поверхности породы. В спектрах образцов исследователи выявили макромолекулярный углерод — крупные, сложные углеродные структуры, также встречающиеся в древних земных породах и метеоритах. В одном марсианском аргиллите органика связана главным образом с силикатами, в другом — с карбонатами и сульфатами, образованными при последующем взаимодействии породы с водой. Относительная целостность органических химических соединений указывает на то, что они ещё относительно недавно скрывались под поверхностью Марса, где не подвергались губительному излучению Солнца. Особенно интригует, что образцы с органикой найдены уже за пределами кратера Езеро. Это намекает на то, что жизнь на Марсе могла существовать не только в древних озёрах. Следует оговориться, что биологическое происхождение находки остаётся недоказанным. Макромолекулярный углерод мог быть как следом древней микробной жизни, так и появиться без её участия, например, в результате гидротермальных реакций, химического синтеза в породах или попасть на Красную планету на метеорите. Perseverance был отправлен на Марс как разведчик для сбора наиболее перспективных с точки зрения поиска следов жизни образцов, которые затем должны были вернуть на Землю для максимально точного анализа. Приборы марсохода не способны отличить биотическое происхождение найденной органики от абиотического. Программа NASA по возврату образцов с Марса была отменена, так что вопрос доказательства существования биологической жизни на Марсе отложен до лучших времён. NASA впервые выбрало частника для доставки приборов к Марсу — компанию экс-гендира Google Эрика Шмидта
18.06.2026 [10:24],
Геннадий Детинич
Под руководством нового главы NASA — миллиардера Джареда Айзекмана (Jared Isaacman) — агентство ускоряет вовлечение бизнеса в глобальные космические программы. Буквально вчера было объявлено о заключении многолетнего контракта с гарантированной оплатой с компанией Relativity Space. В рамках соглашения она должна создать ракету и космическую платформу, чтобы доставить научные приборы NASA на орбиту Марса. 
Источник изображения: NASA Так совпало, что компания Relativity Space принадлежит бывшему гендиру Google — Эрику Шмидту (Eric Schmidt). Он возглавил и вложил в неё средства около года назад. Relativity Space пытается создать ракеты-носители уровня SpaceX Falcon 9 и Falcon Heavy — Terran R. Запуск раннего прототипа в 2023 году был неудачным. Между тем, компания должна выполнить заказ NASA в 2028 году, когда Марс будет в благоприятной позиции для отправки туда земного аппарата. Первый запуск ракеты Terran R в космос ожидается в текущем году. Планы отправить к Марсу созданный с нуля компанией корабль на пока не летавшей ракете — это смелое предприятие. Согласно пресс-релизу агентства, Relativity Space должна доставить на орбиту Марса комплект из четырёх научных приборов, получивший название Aeolus. По сути, это будет первая глобальная метеостанция на Марсе, которая ежедневно будет собирать информацию о градиенте температур в атмосфере планеты до высоты 60 км, состоянии облачности, поведении пыли в атмосфере и силе и направлении ветров на разных высотах. Эта информация послужит целям планирования будущих марсианских миссий, включая высадку людей на Красную планету. Для таких важных мероприятий необходимо будет знать погоду в местах спуска, чтобы максимально обезопасить корабли и экипажи. «Подобные государственно-частные партнёрства многократно усиливают развитие науки, — сказал администратор NASA Джаред Айзекман на встрече с коллективом Relativity Space. — Сочетая приборы NASA мирового класса с коммерческими инновациями и инвестициями, мы сможем проводить больше научных исследований, чаще и сократить время, необходимое для передачи важных данных в руки исследователей, готовящихся к будущим полётам человека на Марс». NASA упростит разработку ядерного корабля для полёта к Марсу, чтобы успеть к запуску в 2028 году
05.06.2026 [15:25],
Геннадий Детинич
В конце марта NASA заявило о намерении уже в конце 2028 года первым запустить к Марсу космический корабль с ядерным ракетным двигателем. Подобные обязательства оказались несовместимы с обычными процедурами НИОКР. На днях представители агентства пояснили, что для ускоренной разработки революционного проекта некоторые этапы будут упрощены. Это позволит реализовать проект в сжатые сроки — за 2,5 года, что станет беспрецедентным случаем в истории. 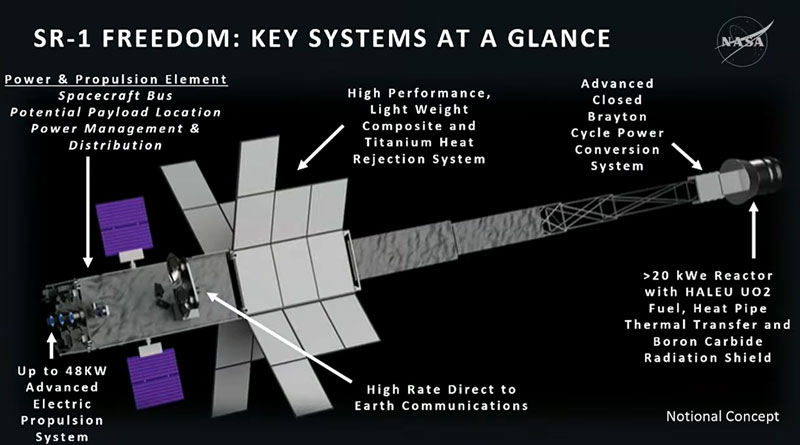
Источник изображения: NASA Обещания NASA подкреплены тем фактом, что электроплазменный двигатель для будущего корабля SR-1 Freedom уже готов и испытан — он взят от нереализованной окололунной космической станции Lunar Gateway, необходимость в которой в рамках проекта Artemis отпала: лунную базу теперь планируют строить непосредственно на поверхности спутника. Остальное, конечно, придётся делать с нуля, но большинство наработок для марсианского проекта уже имеется, включая полезную нагрузку SkyFall из трёх марсианских вертолётов наподобие уже отработавшего на Красной планете Ingenuity. Вопрос с финансированием проекта решён за счёт прекращения создания станции Lunar Gateway, от которой остались неизрасходованные средства в размере $2,6 млрд. Также у NASA есть определённый запас финансов, но специально на проект ядерного корабля SR-1 Freedom средства не выделялись, по крайней мере на 2027 год. В NASA не считают это проблемой и намерены в любом случае обеспечить финансирование разработки. Техническое обоснование проекта ожидается уже будущей осенью, и, вероятно, тогда же будет готова смета. Критики сомневаются, что агентство сможет реализовать проект ядерного корабля за 2,5 года. Такой срок больше подходит для разработки кубсата. В NASA обещают попытаться и сделать всё возможное, чтобы грандиозные планы были реализованы в заявленный срок — к декабрю 2028 года, когда откроется окно для отправки корабля к Марсу. Согласно проекту, корабль SR-1 Freedom впервые получит реактор деления для питания электроплазменного ракетного двигателя. Такие двигатели создают непрерывную тягу, хотя и сравнительно слабую. Реактор будет вынесен далеко вперёд относительно блока с аппаратурой и полезной нагрузкой. Ещё одним отличительным признаком SR-1 Freedom станут охлаждающие панели, размещённые на основном корпусе. Корабль SR-1 Freedom будет далёк от идеального ядерного буксира. С учётом сжатых сроков реализации проекта это будет максимально упрощённый демонстратор. NASA завершило миссию марсианского зонда MAVEN — он так и не нашёлся после загадочной аварии на борту
04.06.2026 [09:37],
Геннадий Детинич
3 июля 2026 года NASA официально попрощалось с миссией и зондом MAVEN — первым космическим аппаратом, специально созданным для изучения процессов в верхних слоях атмосферы Марса. Зонд проработал на орбите Красной планеты более 11 лет, хотя его основная миссия была рассчитана всего на один год. Последний раз сигнал от MAVEN был получен 6 декабря 2025 года, после чего аппарат неожиданно перестал выходить на связь. 
Источник изображения: NASA Созданная NASA в феврале 2026 года комиссия по расследованию происшествия пришла к выводу, что аппарат уже не подлежит восстановлению. Что самое обидное, до того как скрыться за диском Марса все подсистемы MAVEN работали штатно, но после расчётного выхода из радиотени спутник не возобновил связь с Землёй. Анализ чудом полученного из шума короткого фрагмента радиотелеметрии показал, что аппарат находился в безопасном режиме и вращался с необычно высокой скоростью. По предварительному выводу, это вращение привело к потере ориентации солнечных панелей и полному разряду аккумуляторов, после чего система связи не смогла возобновить работу. При этом первопричина самой аномалии пока не установлена — финальный отчёт NASA ожидает позднее в 2026 году. Научное значение MAVEN NASA оценивает как исключительно высокое. Аппарат изучал, как солнечный ветер и солнечные бури постепенно «сдувают» марсианскую атмосферу в космос, помогая понять, почему древний Марс мог быть более тёплым и влажным, а затем превратился в холодную и сухую планету. Одним из важных результатов стало подтверждение того, что потери атмосферы резко усиливаются во время солнечных бурь. MAVEN также открыл несколько типов марсианских полярных сияний, включая протонные сияния, которые на Марсе могут возникать не только у полюсов, как на Земле, а практически повсеместно. Кроме этого, MAVEN впервые измерил процесс атмосферного распыления у другой планеты: энергичные ионы врезаются в атмосферу Марса и выбивают из неё частицы газа, в частности аргона. Это нейтральный газ и его потеря в атмосфере обусловлена исключительно влиянием солнечного ветра. Аппарат также изучал, как глобальная пылевая буря 2018 года поднимала молекулы воды в верхние слои атмосферы и ускоряла её распыление в космос. За время работы команда MAVEN подготовила более 800 научных публикаций, а сам аппарат был важным элементом марсианской ретрансляционной сети NASA, передавая данные от марсоходов на Землю. Поэтому завершение миссии — это не просто потеря одного зонда, а закрытие одного из самых продуктивных этапов изучения атмосферы Марса. Учёные предложили засеять марсианские пещеры летающими «одуванчиками», которые доставит робот-мокрица
25.05.2026 [17:33],
Дмитрий Федоров
Учёные предложили отправить в марсианские лавовые трубки шарообразный аппарат с тысячами малых летательных зондов, созданных по образцу семян одуванчика. Система должна проникнуть в подземные ходы через провалы в сводах пещер, выпустить зонды и составить карту скрытой сети, куда марсоходы Curiosity и Perseverance не могут попасть из-за размеров. 
Источник изображения: G. Neukum / ESA, DLR, FU Berlin Марсианские лавовые трубки — крупнейшая известная сеть подземных ходов в Солнечной системе. Они сформировались после древних вулканических извержений. Отдельные трубки достигают более 250 метров в поперечнике, что более чем в восемь раз превышает ширину пещер в Калифорнии. Исследователи уже обнаружили на Марсе системы лавовых трубок протяжённостью свыше 1200 километров. Учёные считают, что часть подземной сети ещё не найдена, поэтому для её изучения нужны аппараты, способные проходить через узкие провалы, работать без солнечного света и двигаться в неизвестных воздушных потоках. «Марсоходы размером со школьный автобус», — заявил доцент Горного и технологического института Нью-Мексико Мостафа Хассанальян (Mostafa Hassanalian). — «Именно поэтому они не могут туда попасть». Он предлагает систему из двух типов аппаратов. Первый — шарообразная машина, созданная по образцу мокрицы. Такой аппарат планируют опустить через отверстие в своде пещеры на парашюте, чтобы он мягко спустился на дно лавовой трубки. Внутри него разместят тысячи малых летательных зондов, похожих на семена одуванчика. 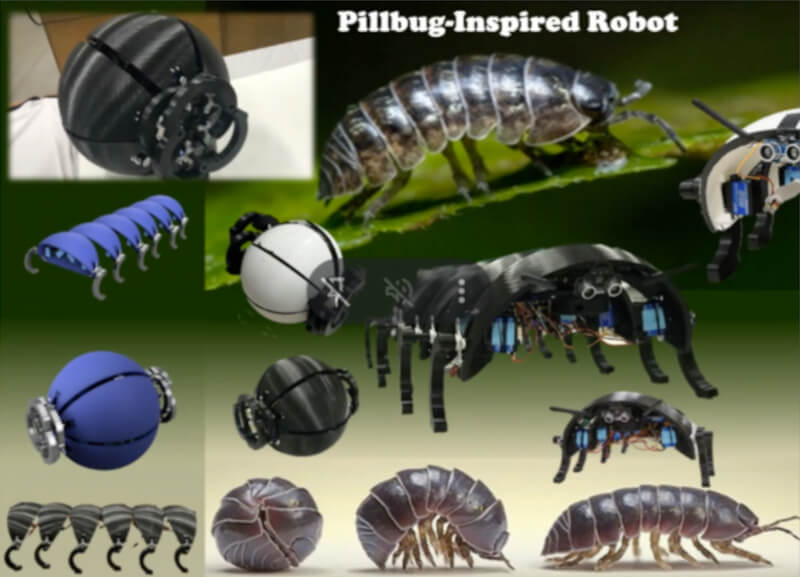
Концепция шарообразного робота, созданного по образцу мокрицы: аппарат должен доставить в марсианские лавовые трубки миниатюрные летательные зонды, выпустить их внутри для составления карты. Источник изображения: New Mexico Tech После посадки аппарат выпустит зонды в подземный ход, а марсианские ветры смогут унести их на большие расстояния. Во время движения зонды будут измерять влажность и температуру, передавать данные по радиосигналу и постепенно формировать карту всей системы ходов. Главный риск связан с неизвестной силой ветра внутри марсианских лавовых трубок. Ни один созданный человеком аппарат ещё не попадал в такие структуры, поэтому учёные не знают, насколько мощными там окажутся воздушные потоки. Если ветра будет недостаточно, зонды не смогут продвигаться по ходам. На этот случай шарообразный аппарат оснастят мощным устройством для нагнетания воздуха. Другая проблема — отсутствие солнечного света. Внутри лавовых трубок не смогут работать солнечные панели, поэтому зонды должны получать питание от электрического заряда, возникающего при изгибе гибкого полимерного материала. Исследователи также планируют окрашивать зонды в белый цвет: такая поверхность меньше нагревается и помогает увеличить дальность перемещения. NASA уже проверило возможность воздушной разведки Марса: марсианский беспилотный роботизированный вертолёт Ingenuity выполнил 72 полёта над поверхностью планеты. Однако он создавался для открытого пространства и не успел попасть в лавовые трубки до выхода из строя в 2024 году. 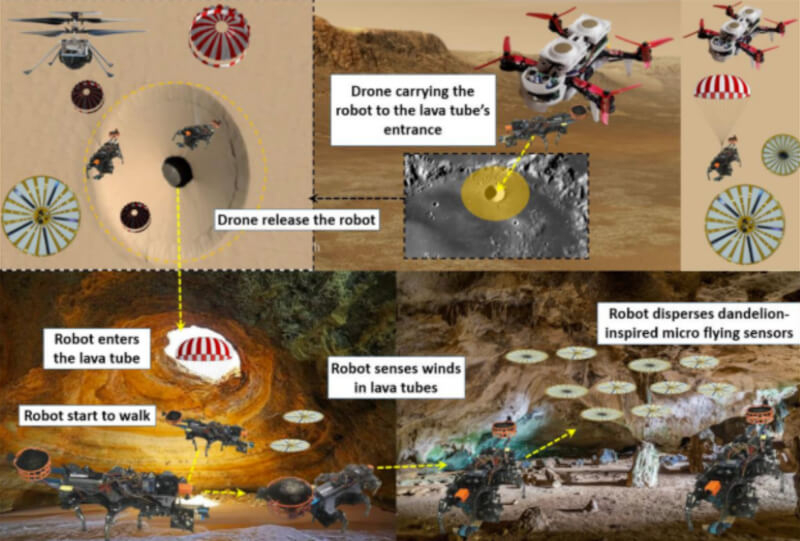
Предложенная схема исследования марсианских лавовых трубок: летательный аппарат доставит шарообразного робота к подземному ходу, робот спустится внутрь, оценит движение воздуха и выпустит миниатюрные летательные зонды, чтобы они разлетелись и помогли составить карту. Источник изображения: New Mexico Tech Особый интерес NASA проявляет к Арсии (лат. Arsia Mons) — щитовому вулкану, то есть широкому и пологому вулкану, образованному потоками жидкой лавы, в марсианской области Фарсида — крупном вулканическом регионе Марса. В его вулканическом щите обнаружены провалы, возникшие после обрушения сводов лавовых трубок: такие отверстия образовали колодцы и открыли доступ к крупной внутренней сети подземных ходов. Тепловые измерения в районе этих провалов показали, что температура внутри меняется менее резко, чем на поверхности Марса. Более стабильная температура делает марсианские подземные ходы возможными укрытиями для будущих экспедиций. Они могут защитить астронавтов от суровых условий поверхности и помочь заранее выбрать места для будущих баз. Высадка людей на Марсе ожидается не раньше 2030-х годов. К этому времени разведка лавовых трубок с помощью малых летательных аппаратов может стать одним из условий долгосрочного присутствия человека на Красной планете. Марсоход NASA Perseverance нашёл на Марсе «сэндвич» из камней
22.05.2026 [08:23],
Дмитрий Федоров
Марсоход NASA Perseverance сфотографировал необычную каменную конструкцию на поверхности Красной планеты — три камня, уложенных друг на друга наподобие сэндвича. Снимок сделан 13 мая (сол 1859 — 1859-й день работы ровера на Марсе) камерой Mastcam-Z на мачте ровера. 
Источник изображения: NASA, JPL-Caltech, ASU На Земле такие каменные пирамидки знакомы любому туристу. По данным Службы национальных парков США (National Parks Service), некоторые из них служат указателями троп. Но на Марсе некому складывать камни — на планете до сих пор не побывал ни один человек. Учёные считают, что перед нами, вероятнее всего, один камень, расколовшийся из-за ветровой эрозии или воздействия воды, которая текла по поверхности Марса в далёком прошлом. Наблюдения другого марсохода, Curiosity, указывают на то, что ветер остаётся главной геологической силой на планете и разрушает породы на протяжении сотен миллионов и даже миллиардов лет. Находка не уникальна. Марсоходы и раньше обнаруживали необычные образцы: странный пупырчатый камень, валуны, расставленные на равных расстояниях друг от друга, и камень с чёткими полосами. Конспирологические теории сопровождают марсианские снимки с 1976 года, когда на фотографии миссии Viking исследователи разглядели подобие человеческого лица. Но выяснить, почему марсианские камни приняли такую форму, куда интереснее любых домыслов. Понимание того, как именно раскалываются и выветриваются марсианские породы, помогает учёным восстанавливать геологическую историю планеты — от древних рек до современных песчаных бурь. NASA испытает первые космические «заправки» для полётов к Луне и Марсу
20.05.2026 [00:49],
Николай Хижняк
В конце этого года американское аэрокосмическое агентство NASA собирается провести испытания технологий хранения и транспортировки сверхохлаждённого криогенного топлива в космосе. Это необходимо для будущих пилотируемых миссий на Луну и Марс. 
Рендер модуля LOXSAT в космосе. Источник изображения: Eta Space Для этих целей NASA собирается запустить на околоземную орбиту демонстрационный аппарат Liquid Oxygen Flight (LOXSAT). С помощью этого модуля космическое агентство хочет протестировать возможности управления жидкостями, которые потребуются для хранения криогенного топлива в условиях микрогравитации, что сопряжено с дополнительными трудностями по сравнению с другими видами топлива. В заявлении NASA говорится, что в будущем такие аппараты могут стать «своего рода космическими заправками, которые обеспечат возможность длительных космических исследований». По данным NASA, аппарат LOXSAT планируется вывести на околоземную орбиту этим летом на борту спутникового модуля Photon компании Rocket Lab. Запуск состоится с космодрома компании в Новой Зеландии приблизительно в середине июля (пока в планах — 17 июля) с помощью ракеты-носителя Electron. Миссия рассчитана на девять месяцев. В ходе неё будут проведены испытания и сбор данных о 11 различных компонентах системы управления криогенными жидкостями. Эти данные помогут усовершенствовать технологии для их последующего масштабирования. Криогенное топливо необходимо хранить при строго контролируемой температуре, чтобы оно не испарялось ни на Земле, ни в космосе. Те же температурные условия, из-за которых эти жидкости сложно хранить, затрудняют и их транспортировку. Проект LOXSAT проводится в сотрудничестве с компанией Eta Space из Рокледжа, штат Флорида, США. NASA надеется, что эта технология поможет в перспективе создать на орбите топливохранилища для космических аппаратов, предназначенных для долгосрочных миссий в дальний космос. Это ключевой фактор для достижения целей NASA по возвращению на Луну в рамках программы Artemis, а также часть более фундаментального проекта по разработке системы управления криогенными жидкостями, в котором участвуют учёные и инженеры из Центра космических полётов имени Джорджа Маршалла, Исследовательского центра Гленна и Космического центра Кеннеди. Компания Eta Space была выбрана в рамках инициативы NASA Tipping Point. В её рамках агентство поручило 14 компаниям разработку различных технологий для достижения целей программы Artemis по обеспечению стабильной работы на поверхности Луны к 2030 году. Возможность управления криогенным топливом в космосе — важнейшая часть всей архитектуры. Предполагается, что оба лунных посадочных модуля миссий Artemis, разработанных в рамках программы NASA Human Landing System, будут использовать криогенное топливо и потребуют дозаправки на орбите. Это необходимо для выполнения миссии по высадке астронавтов на поверхность Луны, а затем их возвращения обратно на лунную орбиту. Оба модуля используют жидкий кислород в качестве окислителя для своих топливных смесей. Корабль Starship от SpaceX работает на смеси жидкого кислорода и жидкого метана (металокс). Другой модуль, Blue Moon от компании Blue Origin, работает на жидком кислороде и жидком водороде (гидролокс). Оба вида топлива требуют постоянного криогенного охлаждения для поддержания жидкого состояния. Пока ни один из этих модулей, как и ни один другой космический аппарат на сегодняшний день, не продемонстрировал, как будет обеспечиваться долгосрочное хранение этих сверхохлаждённых видов топлива, а также как будет осуществляться дозаправка с одного аппарата на другой. Таким образом, LOXSAT может стать первым аппаратом такого рода. 
Модуль LOXSAT внутри производственного комплекса сборки космических аппаратов компании Rocket Lab в Лонг-Бич, Калифорния. Источник изображения: Rocket Lab Компании SpaceX и Blue Origin продолжают испытания своих лунных посадочных модулей. Starship от SpaceX готовится к двенадцатому испытательному полёту, запланированному на 20 мая, а модуль Blue Moon Mark 1 (MK1) от Blue Origin проходит заключительный этап испытаний на объектах компании недалеко от Космического центра Кеннеди во Флориде. Результаты 12-го испытательного полёта Starship окажут существенное влияние на дальнейшее развитие этого космического корабля до конца года. Это будет первый запуск новой версии ракеты Starship V3. Успешное испытание при первом запуске может означать, что в дальнейшем частота испытательных полётов увеличится — с момента последнего запуска Starship прошло семь месяцев. Но неудача может ещё больше затормозить разработку Starship и, в свою очередь, отодвинуть сроки реализации программы NASA Artemis. Модуль Blue Moon MK1 от Blue Origin готовится к запуску, но ракета New Glenn для его доставки на орбиту в настоящее время не используется из-за аварии второй ступени во время последнего запуска, в результате которой полезная нагрузка не была выведена на орбиту. MK1 — грузовая версия пилотируемого посадочного модуля, который компания Blue Origin планирует использовать для миссий Artemis. В конце этого года планируется провести демонстрационную (непилотируемую) посадку модуля на Луну. Однако этого не произойдёт, пока Федеральное управление гражданской авиации не завершит расследование предыдущей аварии New Glenn. NASA планирует провести миссию Artemis-3 в конце 2027 года. В рамках этой миссии четыре астронавта отправятся на низкую околоземную орбиту, чтобы отработать манёвры сближения и стыковки космического корабля Orion с одним или обоими лунными посадочными модулями программы. NASA заявило, что запуск будет проводиться с любым из модулей, который будет готов к моменту запланированного начала миссии, даже если это будет означать, что один из модулей останется на Земле. К тому времени LOXSAT завершит собственные орбитальные испытания. Если всё пойдёт по плану, аппарат предоставит учёным и инженерам полезные данные, которые могут помочь SpaceX и Blue Origin в разработке систем управления криогенным топливом в условиях микрогравитации и в конечном итоге привести к созданию орбитальных заправочных станций, которые понадобятся не только для поддержки миссий Artemis, но и для других экспедиций к Луне, Марсу и другим отдалённым уголкам космоса. Зонд Mars Express показал «хаос и кратеры», образовавшиеся в результате древних наводнений на Марсе
16.05.2026 [00:33],
Николай Хижняк
Новые потрясающие снимки, сделанные европейским орбитальным аппаратом Mars Express, показывают суровый марсианский ландшафт, образовавшийся в результате катастрофических наводнений, которые когда-то обрушились на Красную планету миллиарды лет назад. Об этом пишет Space.com со ссылкой на отчёт Европейского космического агентства. 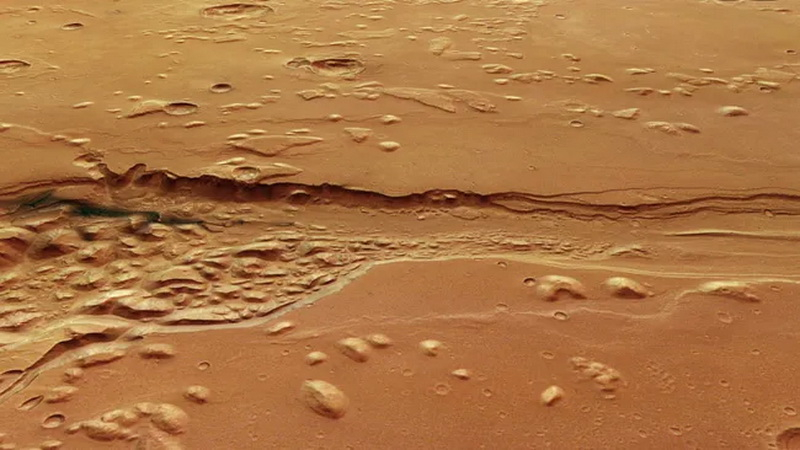
Источник изображений: ESA/DLR/FU Berlin Впечатляющий новый снимок, опубликованный Европейским космическим агентством (ЕКА) 13 мая, демонстрирует долину Шалбатана — обширную марсианскую систему древних каналов вблизи экватора планеты, которая простирается примерно на 800 миль (1300 километров), или примерно на длину Италии. Изображение было сделано стереокамерой высокого разрешения Mars Express (HRSC), подчёркивающей то, что планетологи называют «хаотической местностью», говорится в заявлении космического агентства. Хаотичный рельеф характеризуется растрескавшимися, беспорядочно разбросанными каменными глыбами, которые, как предполагается, образовались, когда подземный лёд растаял и вызвал обрушение поверхности над ним. В долине Шалбатана ландшафт простирается вдоль извилистых долин, образовавшихся в результате огромных наводнений, которые когда-то прошли по Марсу около 3,5 млрд лет назад. «Такой рельеф часто встречается на Марсе и уже был запечатлён Mars Express», — говорится в заявлении ЕКА. Исследователи полагают, что огромное количество грунтовых вод вырвалось на поверхность в результате серии катастрофических наводнений, которые устремились вниз по склону и быстро сформировали обводнённые долины, наблюдаемые сегодня. Основной канал, видимый на снимках, имеет ширину около 6 миль (10 километров) и глубину примерно 1640 футов (500 метров). 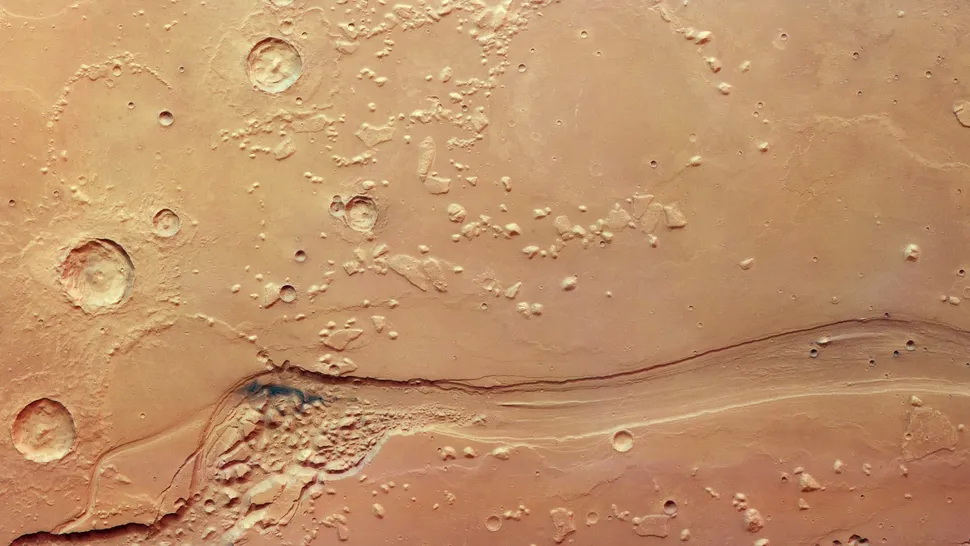
Часть долины Шалбатана, крупного канала в экваториальной области Марса Недавние снимки также демонстрируют следы сложного геологического прошлого Марса по всему региону, что позволяет предположить: долина Шалбатана, возможно, когда-то была ещё глубже, прежде чем со временем постепенно заполнилась отложениями, пеплом и другими материалами. Считается, что тёмные сине-чёрные отложения, разбросанные по долине, представляют собой вулканический пепел, переносимый марсианскими ветрами, в то время как ударные кратеры, морщинистые хребты и изолированные горные массивы указывают на повторяющиеся циклы катастрофических наводнений, потоков лавы и эрозии, продолжавшиеся миллиарды лет. 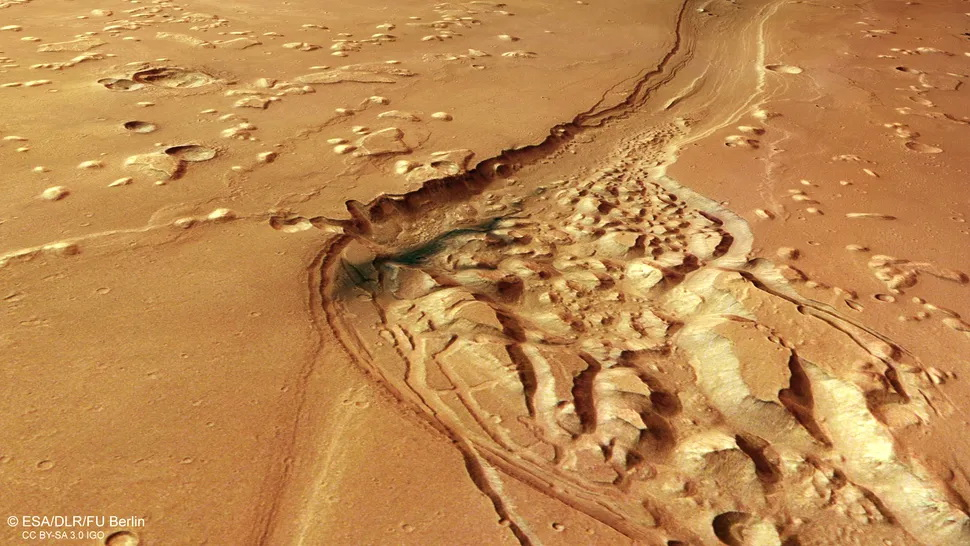
Небольшой участок хаотичного рельефа в долине Шалбатана Учёных особенно интересуют такие регионы, как долина Шалбатана, поскольку они хранят свидетельства того, что когда-то на Марсе было намного теплее и влажнее, чем сегодня. Согласно заявлению ЕКА, канал впадает в равнину Хриса — один из самых низменных регионов Марса, где, по мнению некоторых исследователей, когда-то мог существовать древний океан. Запущенный в 2003 году аппарат Mars Express остаётся одной из самых долго работающих миссий на Марсе. Его камера высокого разрешения уже более двух десятилетий составляет цветные и трёхмерные карты Красной планеты. За время своей работы аппарат сыграл важную роль в обнаружении свидетельств водного прошлого Марса, картировании минералов, образовавшихся в воде, изучении залежей льда и даже получении данных, указывающих на возможное наличие жидкой воды под южной полярной шапкой планеты. Марсоход NASA Perseverance сделал бодрое селфи в ореоле солнечных лучей
15.05.2026 [09:00],
Геннадий Детинич
NASA опубликовало новый художественный автопортрет марсохода Perseverance, сделанный на поверхности Марса во время его работы на западной кромке кратера Езеро (Jezero). Снимок был собран из 61 отдельного кадра, полученного камерой WATSON, установленной на роботизированной руке аппарата. Изображение оказалось одновременно поэтичным и познавательным, радуя глаз и давая учёным пищу для размышлений. 
Источник изображений: NASA Сам снимок был сделан ещё 11 марта, на 1797-й сол (марсианские сутки) миссии, в районе, который команда исследователей назвала Lac de Charmes. Это одна из наиболее удалённых точек маршрута Perseverance с момента его посадки в кратере Езеро в феврале 2021 года. На переднем плане виден скальный выступ Arethusa, где марсоход предварительно выполнил зачистку поверхности: специальный инструмент сточил верхний слой породы, открыв внутренние структуры для спектроскопического анализа. Такой метод позволяет изучать минералогический состав древних пород и искать признаки того, что миллиарды лет назад здесь могла существовать вода, а возможно, и микробная жизнь. Технически создание подобных селфи — достаточно сложная задача. Камера WATSON делает десятки снимков с разных углов, а затем программные алгоритмы на Земле объединяют их в одну слитную композицию. Роботизированная рука длиной около 2,1 м при этом специально выводится из кадра благодаря особой последовательности съёмки. Сам марсоход массой около 1025 кг оснащён радиоизотопным термоэлектрическим генератором мощностью около 110 Вт, который позволяет ему работать независимо от солнечного света. На борту находятся семь научных инструментов, включая спектрометры SHERLOC и PIXL, георадар RIMFAX и систему сбора образцов, предназначенных для последующей доставки на Землю в рамках будущей миссии возврата марсианского грунта. Как отмечено выше, новый автопортрет имеет не только эстетическое значение, но и научную ценность. Он позволяет инженерам оценивать состояние корпуса, колёс и приборов после пяти лет работы в суровых условиях Марса, где температура может опускаться ниже –90 °C, а мелкодисперсная пыль неуклонно оказывает разрушительное воздействие на механические элементы ровера. Кроме того, такие снимки фиксируют этапы продвижения Perseverance по древнему руслу марсианской дельты. Сейчас аппарат исследует особенно интересные геологические образования западного края кратера Езеро — региона, который может хранить самые древние свидетельства существования жидкой воды на Красной планете и потенциальные следы древней марсианской жизни. 
Панорама Марса в апреле 2026 года (можно увеличить, нажав на снимок) «То, что я вижу на этом снимке — это превосходное изображение, вероятно, самых древних горных пород, которые мы собираемся исследовать в ходе этой миссии», — сказал Кен Фарли (Ken Farley), один из ведущих сотрудников проекта Perseverance в Калифорнийском технологическом институте в Пасадене. Возможно, через год или около того учёные воплотят эти наблюдения в научную работу, а нам достаточно знать, что марсоход начал шестой (земной) год работы на Красной планете, радуя нас новостями и картинками древних марсианских ландшафтов. NASA испытало лопасти будущего марсианского вертолёта сверхзвуковой скоростью вращения
09.05.2026 [09:42],
Геннадий Детинич
Инженеры NASA сообщили о важном технологическом достижении: во время испытаний лопасти нового марсианского вертолёта впервые превысили скорость звука, достигнув показателя 1,08 Маха. Это примерно на треть больше по сравнению с прошлым марсианским вертолётом Ingenuity, а значит, обещает большую грузоподъемность будущих марсианских воздушных разведчиков. 
Источник изображения: NASA Тесты проводились в специальной вакуумной камере, имитирующей разреженную атмосферу Марса, где давление примерно в сто раз ниже земного. Это стало серьёзным шагом вперёд в развитии внеземной авиации, поскольку полёты в столь неплотной атмосфере требуют крайне высоких оборотов роторов и нестандартных инженерных решений. Новый проект создаётся как развитие успешного марсианского вертолёта Ingenuity, который в 2021 году стал первым аппаратом, совершившим управляемый полёт на другой планете. Однако возможности Ingenuity были ограничены его массой и полезной нагрузкой. Для следующего поколения вертолётов инженеры стремятся увеличить грузоподъёмность и дальность полёта. Согласно результатам испытаний, переход к сверхзвуковой скорости вращения концов лопастей позволяет повысить подъёмную силу примерно на 30 %, что даст возможность перевозить более тяжёлые научные приборы, аккумуляторы увеличенной ёмкости и сложные системы навигации. Испытания проходили на нескольких вариантах роторов. Один из них — трёхлопастная конструкция, другой — двухлопастная система под названием SkyFall. Чтобы добиться нужного эффекта, исследователи использовали встречный поток воздуха, создаваемый дополнительным винтом (на реальном вертолёте их должно быть два, чтобы аппарата не вращался вокруг своей оси), что позволило смоделировать реальные условия движения аппарата в атмосфере Марса. Несмотря на то что преодоление звукового барьера на Земле обычно сопровождается сильными вибрациями и аэродинамической нестабильностью, испытания показали, что конструкция выдерживает экстремальные нагрузки без разрушения. Это подтверждает перспективность технологии для будущих инопланетных миссий, а не только для Марса. Разработка таких сверхскоростных роторов открывает новые возможности для исследования Красной планеты. Следующие марсианские вертолёты смогут выполнять не только разведку местности, как это делал Ingenuity, но и доставлять научное оборудование, обследовать труднодоступные каньоны, кратеры и пещеры, а также помогать наземным роверам прокладывать безопасные маршруты. В перспективе подобные технологии могут стать основой для полноценной воздушной транспортной системы на Марсе, что значительно расширит возможности будущих экспедиций и приблизит человечество к более масштабному освоению планеты. Двухлопастной ротор показал лучшую динамику, разгоняясь до сверхзвуковой скорости быстрее трёхлопастного: на 3570 об/мин для двух лопастей против 3750 об/мин для трёх. Двухлопастной ротор имеет больший диаметр, поэтому его кончики быстрее достигают целевой скорости. Миссия SkyFall, в честь которой назвали пару лопастей, — это запланированный NASA полёт к Марсу корабля с ядерным двигателем, который должен состояться в конце 2028 года. Если всё будет реализовано, спускаемый аппарат сбросит в воздухе три вертолёта, которые среди прочих задач будут искать место для оптимальной высадки человека на Красную планету. Бур марсохода NASA Curiosity застрял в камне — инженеры целую неделю вызволяли его из ловушки
07.05.2026 [09:37],
Геннадий Детинич
Марсоход NASA Curiosity столкнулся с необычной ситуацией во время очередного бурения породы на Марсе. 25 апреля 2026 года ровер брал керн из камня по прозвищу «Атакама». В процессе возврата манипулятора он поднял в воздух камень, который прочно застрял на защитной втулке вокруг сверла. Хотя ранее при бурении верхние слои пород иногда отделялись, этот стал первым, когда камень полностью остался висеть на буре. 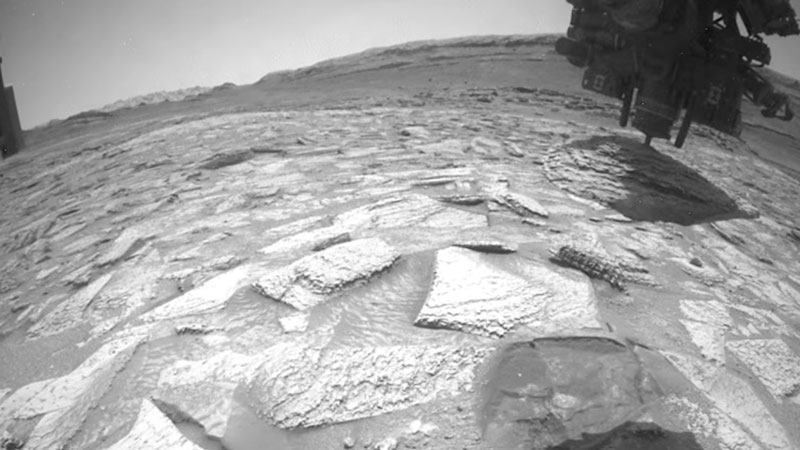
В правом верхнем углу зависший в воздухе на буре камень. Источник изображения: NASA Поскольку ситуация оказалась нештатной, специалисты миссии начали импровизировать. Сначала они попытались избавиться от камня вибрацией бура, однако это не дало результата. Надо сказать, что кусок породы был приличного размера — массой около 13 кг, толщиной 15 см и длиной 45 см. 29 апреля команда NASA изменила ориентацию роботизированной руки и снова использовала вибрацию бура, чтобы стряхнуть камень. Этим удалось лишь стряхнуть пыль с образца, а сам камень продолжил висеть как ни в чём не бывало. Окончательное решение проблемы нашли 1 мая. Инженеры наклонили бур сильнее, одновременно используя вращение манипулятора, вибрацию и включение самого сверла. К удивлению команды, камень отвалился уже при первой попытке, расколовшись при падении на поверхность Марса. За этими процессами всё время наблюдали с помощью чёрно-белых камер ровера на его шасси (камер безопасности) и навигационных камер на его мачте. Это было бы рядовым событием на Земле, но стало настоящим квестом в космосе, где прямое управление системой невозможно. Тем не менее люди и техника справились. Поиском мест для добычи воды на Марсе займутся дроны с георадарами
02.05.2026 [14:02],
Дмитрий Федоров
Беспилотники с радаром могут помочь аппаратам на Марсе точнее выбирать место для бурения в поисках воды. Команда Аризонского университета (University of Arizona) во главе с Роберто Агиларом (Roberto Aguilar) показала, что георадар на беспилотнике с большой точностью картирует погребённые ледники Аляски и Вайоминга — наземные аналоги ледяных залежей Красной планеты. 
Источник изображения: Jack W. Holt / space.com, agupubs.onlinelibrary.wiley.com Работа была опубликована 24 марта в журнале Journal of Geophysical Research. Установленный на беспилотнике георадар фиксировал толщину обломочного слоя горных пород над залежами льда и внутреннюю структуру самого льда — задачи, недоступные орбитальной радиолокации. На малой высоте над ледниками Аляски и Вайоминга учёные строили карты толщины льда и регистрировали слои горных обломков всего в несколько футов. Точность подтвердили полевыми измерениями в шурфах, при бурении и численным моделированием. «Чтобы решить, где бурить на Марсе, нужно знать, лежит ли искомый лёд под одним метром обломочного материала или под десятью, — заявил в сообщении Агилар, аспирант Лунно-планетной лаборатории (Lunar and Planetary Laboratory) Аризонского университета. — Именно такие данные и способна дать система на базе беспилотников». Десятилетиями марсианские миссии искали лёд под поверхностью планеты орбитальными радарами — в частности, радаром подповерхностного зондирования SHARAD на борту аппарата NASA Mars Reconnaissance Orbiter (MRO). Орбитальные данные подтвердили, что под слоями породы и пыли в средних широтах планеты заключены огромные объёмы водяного льда. Однако точную глубину льда и толщину перекрывающего его обломочного слоя не установили — а от этих параметров зависит, удастся ли вообще добраться до искомого ресурса. 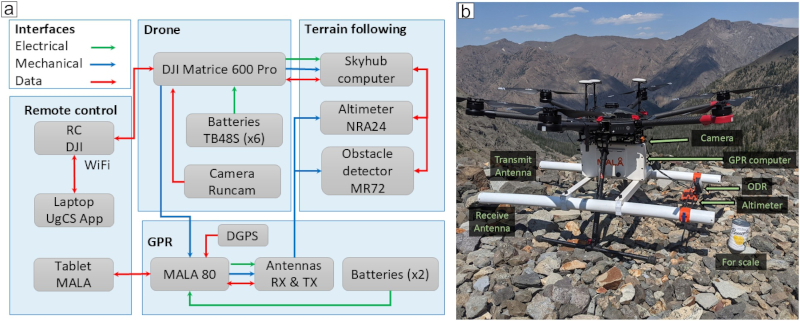
Слева показана схема архитектуры системы, справа — дрон DJI M600 Pro с георадаром MALA Geodrone 80 на стартовой площадке каменного ледника Галена-Крик; белые цилиндры — антенны длиной 1,04 м с разносом 0,5 м, а консервная банка дана для масштаба. Источник изображения: agupubs.onlinelibrary.wiley.com «Мы и раньше знали, что георадар работает, но впервые установили его на беспилотники и проверили, как технологию применить на практике, — рассказал Агилар. — Например, мы выяснили, на какой высоте и с какой скоростью должен лететь беспилотник, насколько важно двигаться в направлении течения ледника и как обеспечить правильную ориентацию радара, чтобы он улавливал отражения от льда». В будущих миссиях беспилотники, скорее всего, не заменят орбитальные аппараты и марсоходы, а станут промежуточным звеном многоуровневой разведки: орбитальные приборы выделяют крупные участки, беспилотники уточняют карты с высоким разрешением, а наземные миссии ведут бурение и анализ. Такой подход может снизить риски и направить миссии в наиболее перспективные точки. Водяной лёд на Марсе — одновременно научный архив прошлых климатических условий и потенциальный ресурс для будущих астронавтов: источник питьевой воды, основа для производства кислорода и ведения сельского хозяйства. Точный выбор района также может повысить шансы обнаружить следы прошлой жизни на планете. 
Источник изображения: Michael Daniel / space.com, tapir.lpl.arizona.edu Идея опирается на опыт вертолёта NASA Ingenuity, который продемонстрировал возможность моторного полёта в разреженной атмосфере Марса и открыл путь к более совершенным летательным научным платформам. «Мы заполняем пробел между сегодняшними наблюдениями с орбиты и более далёким будущим, в котором астронавты высадятся на Марсе и будут вести наблюдения на поверхности, — заявил Агилар. — Это даёт возможность изучать ледники уже сейчас — с воздуха». |
© 1997—2026 Электронное периодическое издание "3ДНьюс" | Свидетельство о регистрации СМИ Эл ФС 77-22224
выдано Федеральной Службой по надзору за соблюдением законодательства в сфере массовых коммуникаций и охране культурного наследия
При цитировании документа ссылка на сайт с указанием автора обязательна. Полное заимствование документа является
нарушением
российского и международного законодательства и возможно только с согласия редакции 3DNews.








 MWC 2018
MWC 2018 2018
2018 Computex
Computex