|
01.06.2026 [11:56],
Владимир Мироненко
До начала лета остались считанные дни. Ресурс 3DNews совместно с партнёрами подготовил небольшую выборку электронных устройств, которые помогут скрасить летний отдых в отпуске и которые сейчас можно приобрести со значительными скидками.
СЖО PCCooler DA360 Pro ARGB
Реклама | ООО «Флюенс Технолоджи Груп» УНП 691700268
PCCooler DA360 Pro ARGB — яркое и тихое охлаждение до 5000 руб. Летом 2026 года достойным выбором в бюджете до 5000 рублей станет 360-мм СЖО PCCooler DA360 Pro ARGB. Модель предлагает насыщенную ARGB-подсветку и три качественных 120-мм вентилятора с гидродинамическим подшипником. Максимальная скорость — 2200 об/мин, воздушный поток — 75,8 CFM. Вентиляторы соединены гирляндой, что сильно упрощает подключение. Система уверенно охлаждает процессоры до 300 Вт TDP, имеет тонкий радиатор и отличную совместимость с платформами Intel LGA 1700/1851 и AMD AM5. Отличный баланс тишины, производительности и внешнего вида для летней сборки!
Цена СЖО PCCooler DA360 Pro ARGB — 5390 руб.
Смартфон realme C85
Реклама | ООО «РМ КОММЬЮНИКЕЙШН» ИНН 7703474590
realme серии C85 — смартфоны для тех, кто устал выбирать между защищенным «кирпичом» и обычным смартфоном, который страшно уронить. Здесь установлена кремний-углеродная батарея на 7000 мА•ч, поэтому аппарат честно держит заряд пару дней, но не раздувается в кармане. Корпус усилили: добавили амортизацию внутри и укрепили углы, так что бытовые падения со стола или из рук ему не страшны. Плюс защита IP69 Pro: можно заливать водой и не бояться пыли.
Цена realme C85 —от 14 000 руб., realme C85 Pro — от 15 тыс. руб.
Умный браслет HEALBE GoBe U
Реклама | ООО «Хилби» ИНН 7725756196
Умный браслет HEALBE GoBe U — полезный гаджет для тех, кто заботится о здоровье и хочет лучше понимать свой организм без сложных подсчётов. Устройство автоматически подсчитывает усвоенные калории, учитывая индивидуальные особенности метаболизма с помощью технологии HEALBE FLOW. В GoBe U поддерживается 37 параметров здоровья: уровень стресса, гидратация, физическая активность и качество сна. Браслет помогает выстроить более здоровые привычки, следить за самочувствием и поддерживать баланс каждый день, а все данные удобно отображаются в приложении.
Цена HEALBE GoBe U — 19 000 руб.
Виниловый проигрыватель Alive Audio Symphony
Реклама | ООО «Бизнес-Фабрика» ИНН 7714631170
Alive Audio Symphony — идеальный проигрыватель для летних вечеров на даче, террасе или в загородном доме. Корпус из дерева (МДФ), алюминиевые опорный диск и S-образный тонарм делают устройство не только функциональным, но и стильным элементом интерьера — от уютной веранды до гостиной с панорамными окнами. Два внешних динамика общей мощностью 30 Вт наполняют пространство тёплым и объёмным звучанием, будь то джаз на закате или виниловая классика во время летнего ужина с друзьями. А функции антискейтинга и питч-контроля оценят даже опытные любители аналогового звука.
Цена Alive Audio Symphony — 25 990 руб.
Игровой смартфон Infinix GT 50 Pro
Реклама | INFINIX MOBILITY LIMITED ИНН 27/63026833
Новинка от Infinix отлично впишется в планы на лето, если ваш игровой досуг не ограничивается только «три в ряд». GT 50 Pro поддерживает от 120 до 144 ФПС в популярных мобильных проектах, таких как PUBGM, MLBB, Standoff 2 и др. Жидкостная система охлаждения позволит часами играть без потери производительности, а специальные сенсорные триггеры приближают эргономику управления к консольному геймпаду. Этот смартфон создан побеждать!
Цена Infinix GT 50 Pro — 43 999 руб.
Робот-пылесос Midea V15 Max Ultra
Реклама | Jiangsu Midea Cleaning Appliances Co., Ltd.
Midea V15 Max Ultra — самый умный робот-пылесос в линейке Midea, разработанный для автоматизации уборки. Пылесос обладает силой всасывания в 22 000 Па, обеспечивая эффективную уборку как пыли, так и более крупных частиц мусора. Фирменная технология Dual Detangling Technology предотвращает спутывание волос и шерсти, что делает его идеальным для владельцев домашних животных. Система IntelliView AI 2.0 Dual Vision System с распознаванием 200 объектов позволяет избегать препятстви1 на пути движения. Специальная система двойной самоочистки очищает за один раз как швабру, так и поддон, сводя к минимуму использование ручного труда.
Цена Midea V15 Max Ultra — 55 082 руб.
Роботизированная газонокосилка Dreame A1 Pro 2000
Реклама | SPRINT PRODUCTS LIMITED ИНН 9909690291
Dreame A1 Pro 2000 — роботизированная газонокосилка с системой Омнисенс для установки без ограничительных проводов, RTK-станций и сигнальных маяков. Модель строит 3D-карту участка, использует интеллектуальное построение маршрута и распознает препятствия. A1 Pro рассчитана на участки до 2000 м², поддерживает две независимые карты и управляется через приложение Dreamehome.
Цена Dreame A1 Pro 2000 — 199 990 руб.
Игровой ноутбук GIGABYTE GAMING A18 PRO GA8J
Реклама | ООО «Современные устройства» ИНН 9728041471
GIGABYTE GAMING A18 PRO — это тонкий 18-дюймовый игровой ноутбук с автономностью свыше 12 часов. Большой 2.5K-экран с частотой 165 Гц, связка Intel Core 7 и GeForce RTX 5080, объёмный звук Dolby Atmos — всё это делает его отличным вариантом для современных игр, фильмов, стриминга и работы в поездках. Передовое охлаждение WINDFORCE INFINITY EX сохранит комфорт даже в тяжелых задачах, а ИИ-помощник GiMATE подберет оптимальные настройки под любой режим работы, а также поможет в творческих задачах.
Цена GIGABYTE GAMING A18 PRO GA8J — 207 136 руб.
29.08.2025 [00:54],
Анжелла Марина
Компании Nvidia и Carbon Robotics объединили усилия для борьбы с одной из самых назойливых проблем в сельском хозяйстве — сорняками. Результатом их сотрудничества стало создание машины LaserWeeder G2 шириной около шести метров, работающей на базе двух дюжин графических процессоров Nvidia.

Источник изображений: techspot.com
Агрегат, буксируемый трактором по полям, использует вычислительную мощность 24 графических процессоров в сочетании с 36 высокоточными камерами для идентификации и мгновенного уничтожения сорняков при помощи 24 лазерных диодов мощностью 240 Вт каждый. Это позволяет сжигать до 10 000 сорняков в минуту, или около 600 000 в час, без применения химических гербицидов.
Технология уже доказала свою эффективность на сотнях ферм: с 2018 года аграриям в 14 странах было поставлено более 150 единиц техники. Система способна обрабатывать от 0,6 до 1,2 гектара (1,5–3 акра) в час с точностью менее одного миллиметра, превосходя по производительности ручную бригаду из 75 человек. При правильной эксплуатации, как пишет TechSpot, робот уничтожает до 99 % сорняков на обрабатываемом участке.
Подчёркивается, что одним из ключевых преимуществ технологии является невозможность выработки устойчивости у сорняков к лазерному воздействию, в отличие от традиционных гербицидов. Устройство весит около 3265 килограммов и требует для буксировки трактор мощностью не менее 145 лошадиных сил. Каждая поставленная система оснащается годовой гарантией, круглосуточной программной поддержкой и возможностью удалённого сопровождения. Расширенные пакеты сервиса доступны за дополнительную плату.
Помимо борьбы с сорняками, Carbon Robotics работает и над решением проблемы нехватки рабочей силы в сельском хозяйстве. По данным компании, более 25 % продуктовых культур в США остаются несобранными из-за дефицита работников. В этой связи разрабатывается система AutoTractor, представляющая собой автономный комплект дооснащения для существующей сельхозтехники, позволяющий машинам работать в режиме 24/7 с возможностью удалённого мониторинга и управления.
07.08.2025 [22:50],
Владимир Мироненко
«Яндекс Роботикс» и «Яндекс Лавка» запустили первый роботизированный даркстор (локальный склад для товаров) в Москве, сообщает ТАСС со ссылкой на информацию «Яндекса».
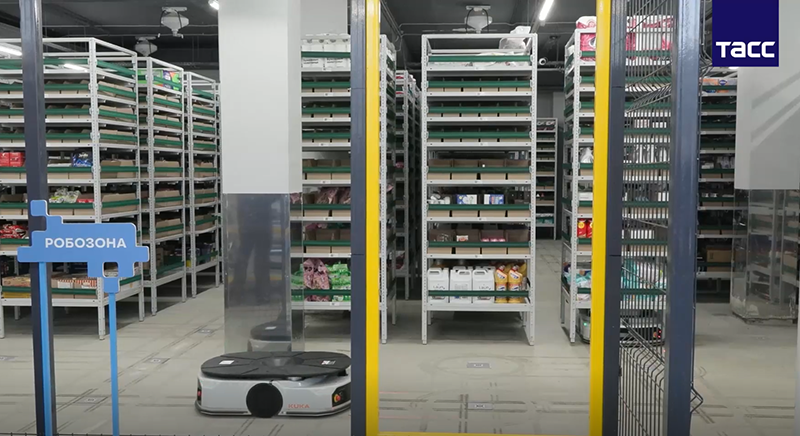
Источник изображения: ТАСС
В так называемой «робозоне», занимающей 28 % площади складского помещения, разместили 84 стеллажа и 12 автономных мобильных роботов (AMR). Один и тот же товар может быть размещён на нескольких стеллажах в разных сочетаниях, что позволяет хранить на той же площади на 15 % больше товаров, сообщили в «Яндекс Роботикс».
Работу мобильных роботов координирует система управления роботами Yandex RMS, разработанная «Яндекс Роботикс». «Роботы доставляют стеллажи с нужными товарами к сотрудникам. Это позволяет ускорить процесс комплектации заказов более чем на 30 % во всём дарксторе и снижает физическую нагрузку на сотрудников», — рассказали в компании.
После оформления клиентом заказа система управления складом (WMS, Warehouse Management System) «Яндекс Лавки» анализирует его и распределяет задачи. Сборку скоропортящихся и замороженных продуктов выполняют сотрудники. Если в заказе есть снеки, сладости и другие товары длительного хранения, WMS передаёт задачу в систему Yandex RMS, которая предложит оптимальный маршрут и направит AMR к нужным стеллажам. Ежедневно мобильные роботы обрабатывают около 40 % ассортимента «Яндекс Лавки».
К середине 2026 года компания планирует запуск ещё пяти автоматизированных дарксторов в Москве и Санкт-Петербурге. В дальнейшем часть новых дарксторов «Яндекс Лавки» сразу получит «робозоны».
09.07.2025 [21:34],
Геннадий Детинич
В процессе поиска новых материалов для определённых задач приходится производить множество замеров. Автоматизация этого процесса значительно ускорила бы исследования, а внедрение ИИ помогло бы с выбором наилучших точек измерения. Всё вместе обещает привести к созданию полностью автоматических лабораторий любого профиля. В Массачусетском технологическом институте сделали выбор в пользу исследования материалов для солнечных панелей.
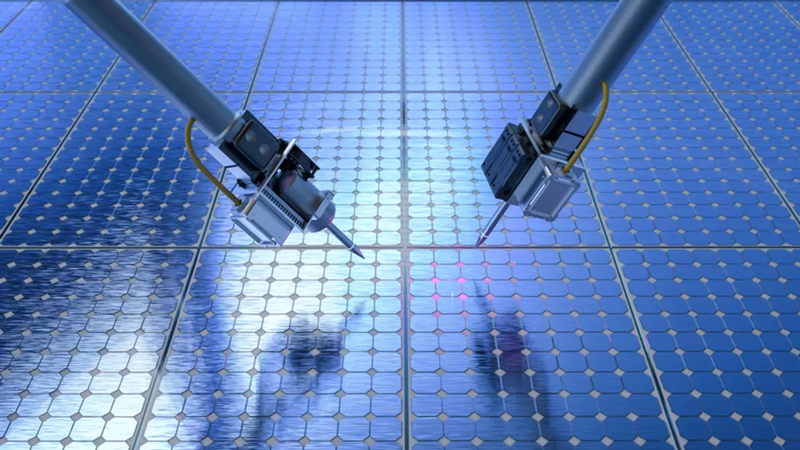
Источник изображения: MIT
При исследовании образцов новых светочувствительных материалов приходится вручную выполнять множество замеров фотопроводимости. Все образцы различаются и редко имеют одинаковую форму. Дополнительные трудности создаёт неоднородность материалов — её необходимо распознать и выбрать правильное место для измерения. Казалось бы, можно воспользоваться машинным зрением, но некоторые характеристики невозможно определить бесконтактным способом. Необходим физический контакт, который отнимает у исследователей массу времени и сил.
Решить эту давнюю проблему — преодолеть медленную скорость ручного измерения ключевых свойств новых материалов, что, в частности, ограничивает прогресс в такой перспективной области, как солнечная энергетика, — взялась группа учёных из MIT. В основе созданной ими автоматической системы лежит роботизированный зонд, способный измерять фотопроводимость — свойство, показывающее, как материал реагирует на свет.
Благодаря интеграции экспертных знаний материаловедов в модель машинного обучения робот научился определять наиболее информативные точки на образце для проведения измерений. Такой подход в сочетании со специализированным алгоритмом планирования позволяет роботу быстро и эффективно перемещаться между точками замера.
«Я нахожу эту работу невероятно интересной, поскольку она открывает путь к автономным методам измерения характеристик, основанным на контакте, — сказал Тонио Буонассиси (Tonio Buonassisi), профессор и старший автор исследования. — Не все важные свойства материала можно измерить бесконтактно. Если необходимо установить контакт с образцом, вы хотите сделать это быстро и получить максимальный объём информации».
Разработанная платформа начинает работу с получения изображения образца перовскита с помощью встроенной камеры. Затем компьютерное зрение делит изображение на сегменты, которые анализируются с помощью нейросетевой модели, использующей знания химиков и материаловедов.
Основываясь на форме и составе образца, нейросеть определяет наилучшие точки для контакта зонда. Эти точки передаются в модуль планирования траектории, который рассчитывает наиболее эффективный маршрут для перемещения зонда. Адаптивность этого подхода имеет решающее значение, поскольку образцы часто имеют уникальную форму. «Это почти то же самое, что измерять снежинки – трудно найти две одинаковые», — отметил Буонассиси.
Ключевым нововведением стала самоконтролируемая работа нейросети, которая выбирает оптимальные точки контакта напрямую по изображениям образцов, без использования обучающих данных. Команда также улучшила алгоритм планирования маршрута, добавив элемент случайности, что помогло роботу находить более короткие и эффективные пути.
В ходе 24-часового тестирования робот выполнял более 125 уникальных измерений в час, превзойдя по точности и надёжности предыдущие ИИ-методы. Этот скачок в скорости и точности поможет ускорить разработку более эффективных солнечных панелей и других электронных устройств.
29.05.2025 [10:56],
Владимир Фетисов
Количество роботов на российских предприятиях необходимо увеличить в пять раз к 2030 году. Об этом заявил премьер-министр России Михаил Мишустин во время недавней встречи со студентами технических вузов.

Источник изображения: Homa Appliances / Unsplash
«За шесть лет нам, конечно, предстоит сделать всё необходимое, чтобы примерно в пять раз нарастить количество роботизированных систем на предприятиях. Плотность мы должны довести до 145 единиц на 10 тысяч работников. Много это или мало – уже неплохо, если нам удастся этого добиться», — приводит источник слова господина Мишустина.
Он также добавил, что работа в озвученном направлении будет сопровождаться всесторонней государственной поддержкой. Глава правительства напомнил, что по поручению президента РФ Владимира Путина страна должна войти в число 25 ведущих стран по уровню роботизации к 2030 году. По данным премьер-министра, в настоящее время в России на 10 тысяч работников приходится 29 роботов.
«Это такой, знаете, сравнительный метод, потому что всё зависит от объёма производства, от спроса и от того, что у конкурентов есть. И четыре года назад параметр не превышал десяти. Идёт мощное развитие <…> Я убеждён, что мы сделаем всё необходимое для того, чтобы Россия стала одной из ведущих стран в производстве роботов», — отметил премьер-министр.
Он добавил, что в настоящее время роботизированные системы активно применяются не только в автопроме или металлообработке, но и в авиа- и судостроении, фармацевтике, пищевой индустрии и других отраслях. В качестве примера разработчика роботизированных комплексов господин Мишустин привёл компанию «Яндекс», которая достаточно давно развивает направление создания роботов.
14.11.2024 [13:55],
Владимир Мироненко
Китайская промышленность в настоящее время пытается решить одну из самых больших проблем с нехваткой рабочей силы. Около 6 млн производителей столкнулись с тем, что стоимость рабочей силы растёт из-за сокращения населения трудоспособного возраста. На помощь приходят роботы, пишет Financial Times.

Источник изображения: Zongwei
Пекин выбрал роботизацию как способ решения проблемы нехватки рабочей силы, предлагая сектору налоговые льготы и субсидии для поощрения инвестиций в это направление. Однако многое будет зависеть от человеческого фактора — в частности, от того, будут ли работники иметь необходимые навыки для управления сложными машинами, отмечает издание. Во многом благодаря господдержке Китай стал за последнее десятилетие крупнейшим в мире рынком промышленных роботов. По данным Международной федерации робототехники, в прошлом году здесь было установлено более 276 тыс. роботов, что составило более половины от общемирового объёма.
Если ранее китайские компании импортировали большую часть роботов, в частности из Японии, Германии и США, то теперь всё чаще устанавливают отечественные устройства, которые гораздо дешевле зарубежных аналогов. Это позволило снизить стоимость интеллектуального производственного оборудования в Китае, но, по словам экспертов, ещё предстоит работа по обучению рабочей силы, которая будет его использовать. Сложное оборудование требует технических знаний, включая инженерные навыки для ремонта и знания ПО, используемого для управления машинами.
Промышленность Китая в значительной степени зависит от почти 300 млн рабочих-мигрантов — выходцев из сельских районов, переехавших в урбанизированные прибрежные регионы в поисках более высокооплачиваемой работы. Из них, по состоянию на прошлый год, только у 52 % было среднее образование, а у 14 % — начальное образование. Как утверждают исследователи, мигранты с наибольшей вероятностью будут вытеснены роботами. В то же время в Китае много инженеров, у которых не будет проблем с адаптацией автоматизированных технологий на заводах.
В первую очередь роботы используются для выполнения работ, от которых работники большей частью отказываются. Генри Хан (Henry Han), президент ABB Robotics China, сообщил, что роботы «умеют выполнять скучную, грязную и потенциально опасную работу, на которую трудно нанять людей».
Провинции со значительными производственными мощностями, в частности Гуандун, запустили программы обучения нового поколения рабочих, но, как выяснилось, из-за отсутствия современного оборудования на этих курсах полагаются на учебники или устаревшие механизмы.
По словам исследователей из университетов Цинхуа и Фудань, наиболее эффективное обучение осуществляется поставщиками роботов и интеллектуального производственного оборудования. Например, компания Zongwei направляет команды инженеров для установки оборудования и обучения клиентов использованию ПО, которое управляет заводской линией. Заместитель генерального директора Zongwei Джек Сю (Jack Xu) пояснил, что высокая конкуренция в Китае позволяет клиентам требовать очень практичного послепродажного обслуживания. Это стимулирует создание простых в эксплуатации машин, чтобы избежать расходов на отправку инженеров для обучения.
Некоторые крупные компании создали специализированные институты для предоставления официальной сертификации. Например, ABB Robotics China создала учебный институт в Шанхае, где проводится обучение клиентов программированию, а также обслуживанию электрической и механической части оборудования.
28.09.2024 [16:14],
Владимир Мироненко
Разработчики Федеральной политехнической школы Лозанны (EPFL, Швейцария) представили на Международной конференции по робототехнике и автоматизации (ICRA) шарнирную роботизированную руку, способную расширить радиус действия, отсоединяясь и самостоятельно перемещаясь к предмету, чтобы его взять.
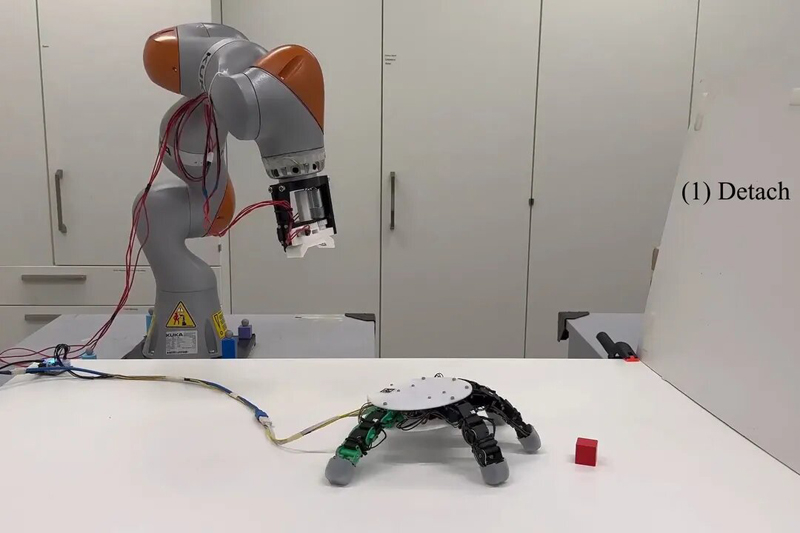
Источник изображения: EPFL
Роботизированные руки обычно прикреплены к основанию на полу или другим конструкциям для дополнительной устойчивости, что ограничивает радиус их действия. Целью исследования, проведённого в Лаборатории алгоритмов и систем обучения EPFL (LASA), была разработка бимодальной роботизированной руки с расширенными возможностями захвата, включая периодическую независимость от руки, к которой она прикреплена.
Роборуки обычно создаются с одной целью: удерживать и перемещать предметы. Чтобы разработать роботизированную руку, которая могла бы делать это, перемещаясь самостоятельно, исследователи сгенерировали и усовершенствовали базовую конструкцию с помощью генетического алгоритма, который опирается на биологические приёмы, и физического симулятора MuJoCo для проверки дееспособности прототипа.
Исследователи определили оптимальное положение и количество необходимых сочленённых пальцев — их оказалось пять, как у человека. Пальцы руки могут сгибаться в двух направлениях, что позволяет ей не только «ползать», но и захватывать два предмета одновременно, будучи прикреплённой к конечности роботизированного манипулятора. Она также может использовать несколько пальцев для подъёма предметов, в то время как остальные функционируют в качестве опоры.
Роботизированная рука также имеет магнитный крепление на «запястье». Если добавить такую шарнирную роботизированную руку, например, к роботу Spot, то его можно будет использовать для исследования или анализа областей, которые сейчас недоступны из-за габаритов и ограниченной манёвренности.
|








 MWC 2018
MWC 2018 2018
2018 Computex
Computex












