







 MWC 2018
MWC 2018 2018
2018 Computex
Computex
Швейцарские инженеры разработали беспилотный летательный аппарат (БПЛА) самолётного типа , которому не нужна взлётно-посадочная полоса. Всё, что нужно роботизированному БПЛА — это столбы или деревья, за которые он цепляется своими гибкими крыльями как летучая мышь или сова.






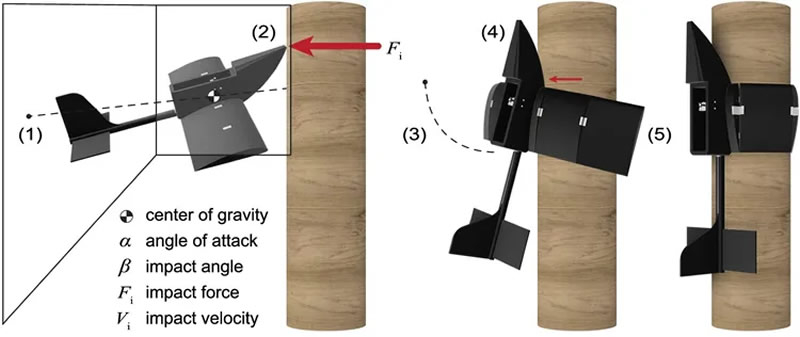
Источник изображения: Nature
Вдохновлённые ловкостью летучих мышей и сов, исследователи из Федеральной политехнической школы Лозанны (EPFL) в Швейцарии оснастили дрон шарнирными крыльями двойного назначения, которые могут быть как жёсткими для полёта, так и гибкими для захвата опоры.
PercHug весом всего 550 грамм имеет «конструкцию с загнутым носом» которая помогает ему автоматически принимать вертикальное положение при обнаружении препятствия. Соприкосновение с препятствием одновременно ослабляет и натяжной трос, активируя пружинный механизм, разворачивающий крылья вокруг опоры, поясняет The Verge, ссылаясь на опубликованную в журнале Nature статью учёных.

Источник изображения: Nature
Уникальная конструкция PercHug позволяет отказаться от традиционных посадочных механизмов, делая его более лёгким, но при этом увеличивая потенциальную грузоподъёмность и дальность полёта. В ходе испытаний PercHug продемонстрировал 73 % успешных приземлений на деревья и столбы после короткого планирования. Однако, прежде чем БПЛА можно будет использовать для размещения дорогостоящего оборудования, такого как датчики и камеры, необходимо повысить процент успешных посадок, признают разработчики.
Источник изображения: Nature
В настоящее время PercHug представляет собой просто планер, запускаемый вручную и не имеющий системы управления. В будущем учёные планируют оснастить его электронной пилотажно-навигационной системой и датчиками управления, а также разработать механизм, позволяющий ему самостоятельно отцепляться от опоры для продолжения полёта. Потенциально планер может быть использован для мониторинга окружающей среды, проведения инспекций инфраструктуры и выполнения спасательных операций в труднодоступных местах.
Источники:





