|
Опрос
|
реклама
Быстрый переход
В США создали робокентавра для спасателей — он умеет пользоваться человеческими инструментами
30.07.2026 [14:05],
Геннадий Детинич
Калифорнийский стартап Satyress («Сатиресса») создал дистанционно управляемого робота Threehalves высотой около двух метров, предназначенного для работы в местах с высоким риском для людей. Конструкция робота напоминает кентавра: похожий на человеческий торс установлен на платформе с четырьмя ногами. Ожидается, что это поможет ему уверенно передвигаться по завалам и пересечённой местности. При этом робот способен сходу пользоваться человеческими инструментами. 
Источник изображений: Satyress Threehalves пока не позиционируется как автономная машина: оператор управляет его движениями с безопасного расстояния при помощи джойстика. Вместо намертво закреплённых на роботе рук используется модульная система конечностей, позволяющая за несколько минут менять рабочую конфигурацию и устанавливать инструменты для конкретных работ, например цепную пилу, дрель или шуруповёрт. Унификация компонентов должна упростить ремонт в полевых условиях, а опора на четыре конечности обеспечит потенциально лучшую устойчивость, чем у двуногих роботов. 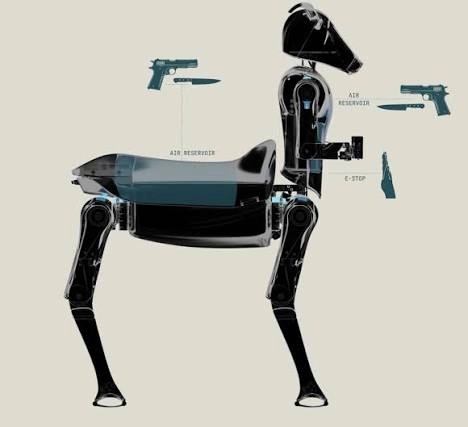 Особое внимание разработчики уделили аварийному отключению мощной машины. Робот способен остановиться после распознавания жеста в виде поднятой ладони. В качестве крайней меры на корпусе размещены баллоны высокого давления: их можно проколоть тем или иным способом (ножом, выстрелом или иными средствами), после чего система сбрасывает давление и механически обездвиживает робота. Тормоза также блокируют механизмы при потере электропитания или давления в пневматической системе.  Несмотря на высоту, Threehalves удобно складывается для перевозки. Утверждается, что два робота могут разместиться рядом в кузове пикапа длиной около 1,7 м. Однако разработчик пока не раскрывает массу аппарата, грузоподъёмность, скорость, время автономной работы, дальность связи и степень защиты от воды, пыли, дыма и высокой температуры. Цена, сроки выпуска и прохождение обязательной сертификации также не объявлены, поэтому на данном этапе Threehalves следует рассматривать, прежде всего, как перспективный прототип, которому ещё предстоит подтвердить работоспособность в реальных аварийно-спасательных операциях.  Добавим, четвероногие машины уже находятся в разработке, как и двуногие. Китайские инженеры развили идею от робопсов до робоконей и даже предлагают своеобразный двуногий робоприцеп для человека, превращающий его в кентавра. Японцы же создают настоящий четвероногий мотоцикл для передвижения по бездорожью. У эволюции не сложилось с колёсами. Человек это исправил и теперь готов заимствовать идеи для транспорта повышенной проходимости у природы, которая лучше четырёх ног для этого ничего не придумала. 
И глаза такие добрые... при этом поигрывая рукояткой газа бензопилы Представлены чипы AMD X100 — процессоры на Zen 5 с мощной графикой для роботов
24.07.2026 [11:41],
Павел Котов
AMD представила спецверсии гибридных чипов APU Strix Halo для систем физического искусственного интеллекта — для роботов. Они имеют схожие характеристики с клиентскими Ryzen AI Max, но рассчитаны на круглосуточный режим работы и десять лет эксплуатации. 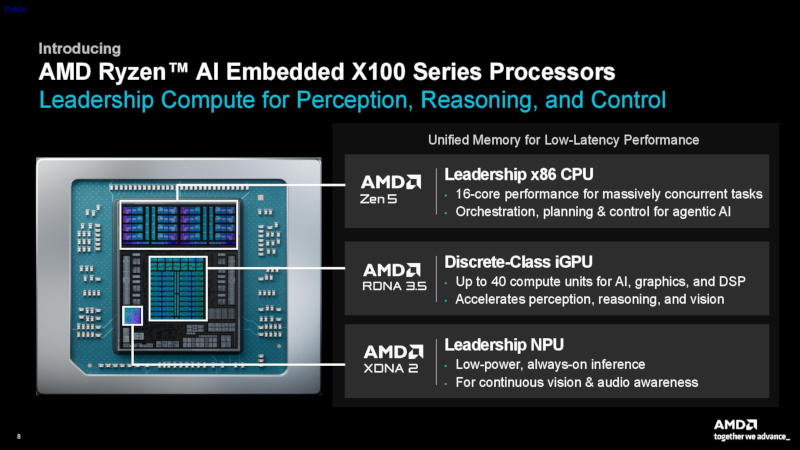
Источник изображений: AMD Существуют три варианта чипов, соответствующих трём оригинальным моделям Strix Halo. Старшая модель X199 предлагает 16 ядер Zen 5 и 40 вычислительных блоков RDNA 3.5; X188 — 12 ядер и 32 вычислительных блока; X168 — восемь ядер и те же 32 вычислительных блока. Подробные спецификации каждой модели не уточняются, но известно о тактовой частоте до 5,1 ГГц в режиме Boost и поддержке до 128 Гбайт унифицированной памяти. Во всех случаях присутствуют нейропроцессор XDNA 2 с производительностью до 50 TOPS, настраиваемый TDP от 45 до 120 Вт и диапазон рабочих температур от -40 °C до 105 °C. 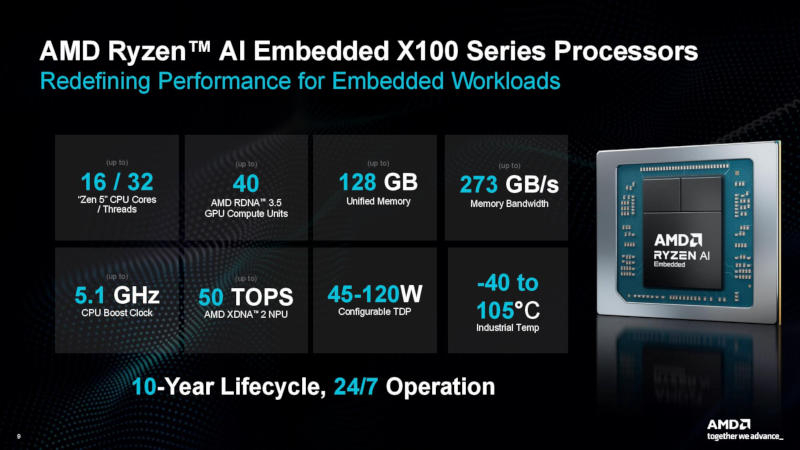 Новая линейка AMD — это ответ на чипы Intel Panther Lake для роботов. Обе компании выступают за интегрированные решения, позволяющие снизить задержку по сравнению с архитектурами, в которых центральный, графический и нейропроцессор, а также память находятся на разных чипах. Чипы линейки AMD X100 физически больше, чем аналоги Panther Lake, но и содержат больше кремниевых компонентов для более ресурсоёмких задач. 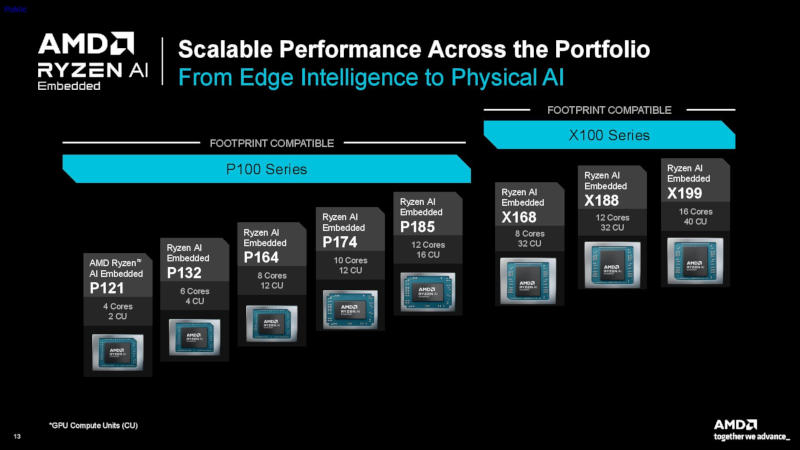 AMD показала сравнительные тесты флагманского X199 с Intel Core Ultra X7 358H — 16-ядерным процессором и интегрированной графикой Intel Arc B390 с 12 ядрами Xe3. Модель AMD X199 оказалась в 1,2 и 1,3 раза быстрее в тестах GeekBench 6.1 и PassMark соответственно, а также в 1,5 раза производительнее в неофициальном тесте SPECrate 2017 с целочисленными нагрузками. В графическом бенчмарке AMD превзошла конкурента в 1,4 раза в Vulkan, в 1,7 раза — в OpenGL (в обоих случаях использовался GFXBench 5 под Ubuntu), а также в 1,6 раза — в Unigine Heaven Extreme. 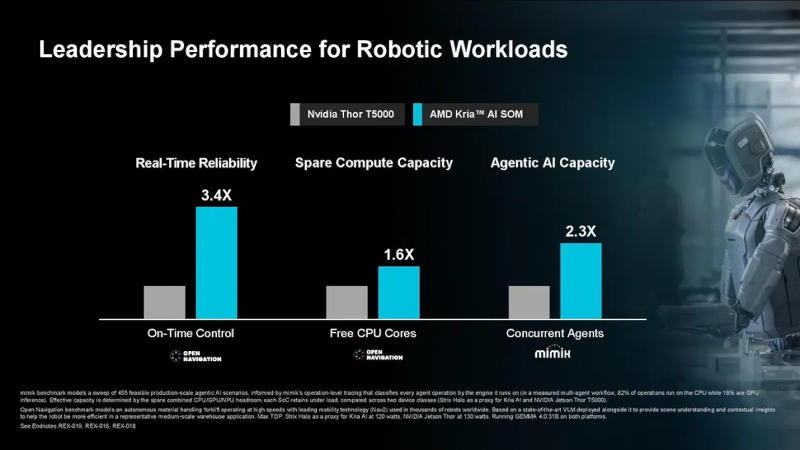 В задачах физического ИИ время до первого токена (TTFT) удалось сократить в 1,4 раза, а число токенов в секунду в бенчмарке Llama с бэкендом Vulkan и TDP 45 Вт — увеличить в 3,5 раза. Правда, тестирование проводилось на AMD Ryzen AI Max 395+, «сконфигурированном в соответствии со спецификациями Ryzen AI Embedded X199», на эталонной плате Maple с тактовой частотой центрального процессора 5,1 ГГц, графического — 2,9 ГГц и постоянным TDP 45 Вт. Intel Core Ultra X7 358H тестировался на MSI Prestige 16 Flip AI+ с TDP 30 Вт, после чего AMD «спрогнозировала» производительность чипа Intel при TDP 45 Вт, «используя коэффициенты масштабирования, полученные из общедоступных данных бенчмарков». Другими словами, сравнение не совсем корректное. 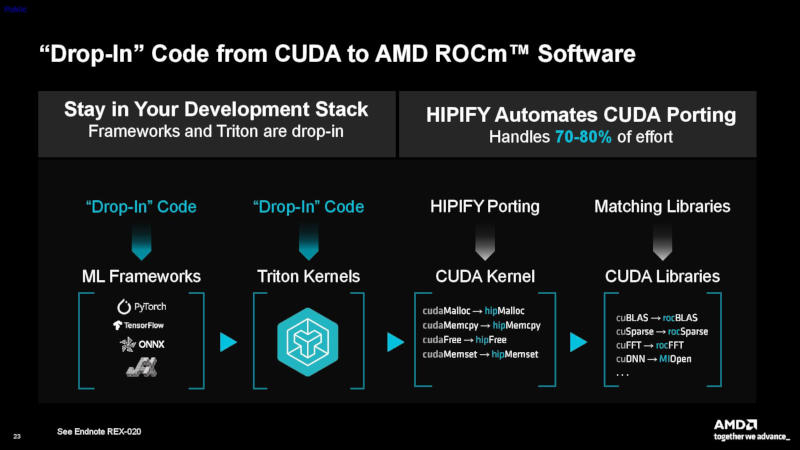 AMD предлагает не только сами чипы X100, но и выпускает их в составе Kria System on Module (SOM) — интегрированной платформы для разработчиков робототехники. Плата размером 120 × 120 мм соответствует стандартному формфактору COM-HPC. Это полностью интегрированное устройство с платой AMD Spartan UltraScale+ FPGA — готовое решение для создания робототехнических систем, включающее специализированные интерфейсы для подключения камер, промышленных сетей и датчиков. В тестах AMD X100 Kria сравнивали с Nvidia Thor T5000, однако проводились они не самой AMD, а по заказу компаний Open Navigation и Mimix. И здесь бенчмарки также не были прямыми: комплект разработчика Nvidia Jetson AGX Thor сравнивался с мини-ПК GMKtech EVO-X2 AI на чипе Ryzen AI Max+ 395, «сконфигурированном в соответствии со спецификациями Ryzen AI Embedded X199». AMD не оставляет попыток переманить разработчиков с платформы Nvidia CUDA: инструмент HIPIFY преобразует код CUDA в AMD HIP C++, принимая на себя 70–80 % «трудозатрат» по портированию. В ходе тестирования компания успешно портировала 15 приложений CUDA общим объёмом 1199 строк кода с показателем автоматизации 70–80 %. AMD X100 Kria составляет «мозг» робототехнической платформы, но компания планирует создать комплексное решение для человекоподобных роботов с использованием программируемых микросхем Spartan UltraScale+, Zynq UltraScale+ и Versal AI Edge Gen 2. Помогать OpenAI создавать роботов будет выходец из китайского автопроизводителя Xpeng
21.07.2026 [12:45],
Алексей Разин
Даже если оставить за скобками выпуск китайской компанией Xpeng близкого по характеристикам конкурента Tesla Model Y, американскому сопернику этот стартап подражает и в других сферах — например, в разработке человекоподобных роботов. Один из руководителей профильного направления перейдёт на работу из Xpeng в OpenAI. 
Источник изображения: Xpeng По крайней мере, об этом сообщает китайское издание CnEVPost со ссылкой на Leiphone, говоря о готовности главы подразделения ИИ-инфраструктуры Лю Сиюаня (Lu Siyuan) перейти на работу из Xpeng в американскую компанию OpenAI. На изначальном месте работы Люс Сиюань руководил созданием ИИ-инфраструктуры китайского автопроизводителя, ему подчинялось около 200 специалистов. В OpenAI он, как ожидается, будет курировать направление создания аппаратных роботов. Опыт Лю, полученный за время работы в Xpeng, весьма обширен, поскольку он отвечал как за обучение ИИ-моделей, так и за развёртывание вычислительной инфраструктуры, адаптацию ПО к чипам Xpeng собственной разработки, оптимизацию ИИ-моделей и внедрение элементов инференса в бортовое ПО автомобилей. Всё это также внедрялось в массовом производстве под руководством Лю Сиюаня. По примеру Xpeng, китайский стартап Li Auto (Lixiang) по итогам недавнего рестайлинга своих гибридов внедрил использование чипов собственной разработки, но первая из компаний такой курс взяла уже давно. После ухода Лю, как ожидается, его подчинённые будут поделены на три более независимые группы, каждая из которых обзаведётся собственным руководителем. Кроме того, кадровый состав команды Xpeng, занимающейся созданием автопилота, претерпит и другие изменения в обозримом будущем, если верить источнику. Xpeng собирается приступить к массовым поставкам человекоподобных роботов в следующем квартале. В следующем году компания предложит фирменные технологии активной помощи водителю на рынках присутствия за пределами КНР. Кстати, в прошлом месяце Xpeng покинул Ми Лянчуань (Mi Liangchuan), который возглавлял робототехнический бизнес компании. Бывший руководитель разработки технологий автопилота Ли Лиюнь (Li Liyun) после ухода из Xpeng в октябре прошлого года перешёл на работу в стартап EngineAI Robotics, который также занимается роботами. Samsung тоже захотела делать роботов — новое подразделение возглавил выходец из Hyundai
21.07.2026 [12:43],
Павел Котов
Samsung Electronics объявила о создании подразделения робототехники с прямым подчинением генеральному директору. Инициатива призвана ускорить разработку и коммерциализацию в этой области, а также превратить робототехнику в фактор роста компании. 
Источник изображения: BoliviaInteligente / unsplash.com Новое подразделение Samsung RX (Robotics eXperience) будет определять среднесрочную и долгосрочную стратегию в области робототехники, разработку основополагающих технологий и реализацию бизнес-планов, а также расширит исследовательские возможности компании как в Южной Корее, так и за её пределами. Стратегический отдел в области робототехники возглавит исполнительный вице-президент Ли Дон Кун (Lee Dongkun) — ранее он руководил стратегией в области робототехники в Hyundai Motor, в том числе направлением развития Boston Dynamics. Samsung планирует создать исследовательские центры в области робототехники в США, Китае и Японии, где данное направление развивается быстро — доступ к местным экосистемам и опыту специалистов поможет компании повысить конкурентоспособность. В ходе телефонной конференции в рамках январского ответа под итогам финансового года Samsung заявила о намерении добиться «ощутимых» результатов в своём бизнесе по производству человекоподобных роботов. В апреле корейский электронный гигант сообщил о готовности рассматривать инвестиции и поглощения, где это необходимо, чтобы ускорить разработку и вывод робототехники на рынок; а также о намерении установить партнёрские отношения с местными компаниями для разработки технологий. Достижения в области физического искусственного интеллекта делают связанный с робототехникой бизнес более жизнеспособным, считают в Samsung. Сначала они будут развёртываться на производственных площадках, а затем появятся в бытовой и розничной сферах. Nvidia представила компактные компьютеры Jetson T3000 и T2000 на чипах Blackwell для роботов
16.07.2026 [15:52],
Николай Хижняк
Компания Nvidia анонсировала две компактные вычислительные платформы Jetson Thor для роботов, промышленного оборудования и других периферийных систем искусственного интеллекта. Модели Jetson T3000 и T2000 планируется выпустить в первом квартале 2027 года. 
Источник изображений: Nvidia Платформа Jetson Thor T3000 использует графический процессор Nvidia Blackwell и восьмиядерный процессор Arm Neoverse. Она обеспечивает производительность ИИ на уровне 865 FP4 TFLOPS. Система оснащена 32 Гбайт памяти LPDDR5X с пропускной способностью 273 Гбайт/с и поддерживает сетевое подключение со скоростью до 25 Гбит/с. 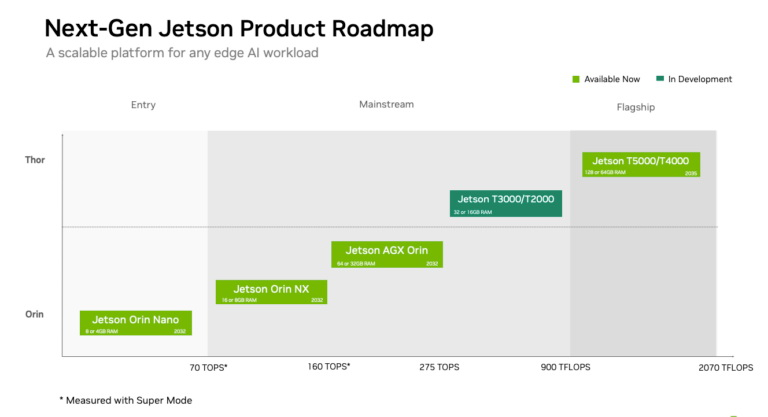 Nvidia заявляет, что T3000 примерно вдвое компактнее и потребляет примерно вдвое меньше энергии, чем существующий модуль T5000. Несмотря на уменьшение размеров, компьютер может обеспечить аналогичную производительность при выполнении таких задач, как обработка естественного языка, компьютерное зрение и моделирование робототехнических систем, отмечает Nvidia. Jetson Thor T2000 — это более доступный вариант с производительностью 400 FP4 TFLOPS, оснащённый 16 Гбайт памяти. Nvidia ожидает, что этот компьютер будет использоваться в системах компьютерного зрения, мобильных роботах, промышленных манипуляторах и других машинах, которым не требуется производительность уровня T3000.  Разработчики смогут эмулировать T3000 уже в конце этого месяца, используя JetPack 7.2.1 и текущий комплект разработчика Jetson AGX Thor. Эмуляция T2000 появится позже, а выпуск физических модулей T3000 и T2000 запланирован на первый квартал 2027 года. Nvidia и Toyota объявили о расширении сотрудничества в сфере физического ИИ
16.07.2026 [07:37],
Алексей Разин
Крупнейший автопроизводитель в мире — корпорация Toyota Motor, исторически уделяла особое внимание оптимизации производственных процессов, поэтому в условиях развития технологий ИИ не может оставаться в стороне от прогресса. Помощь автогиганту в эффективном применении ИИ должна оказать Nvidia — стороны объявили о расширении сотрудничества в этой сфере. 
Источник изображения: Toyota Motor Прежде всего, Nvidia будет помогать Toyota расширять физическое применение ИИ на экспериментальном полигоне Woven City в префектуре Сидзуока, где автопроизводитель обкатывает свои передовые решения. Система управления дорожным движением на этом полигоне будет основана на компонентах и программном обеспечении Nvidia. Системы активной помощи водителю, применяемые в автомобилях Toyota, также будут построены с участием Nvidia. Кроме того, обширный парк роботов на автосборочных предприятиях корпорации также будет управляться с использованием разработок Nvidia, а также американского стартапа Ready Robotics. Сотрудничество Nvidia и Toyota продолжается с 2017 года. Системы автопилота уровня 2+, которые устанавливаются в машины японской марки, основаны на компонентах Nvidia. Основатель компании Дженсен Хуанг (Jensen Huang) на этой неделе находится в Японии, где общается с действующими и будущими партнёрами Nvidia. Корпорация Toyota будет использовать технологию «цифровых двойников» в виртуальной среде Nvidia Omniverse для оптимизации процесса сборки автомобилей. Робототехнические платформы Nvidia также будут использоваться Toyota в различных сферах деятельности. В прошлом году Toyota договорилась об использовании платформы Nvidia Drive AGX Orin в своих будущих транспортных средствах коммерческого назначения. У домашнего человекоподобного робота 1X Neo оказались невероятно быстрые пальцы
11.07.2026 [08:40],
Павел Котов
Норвежско-американская компания 1X, которая специализируется на робототехнике, раскрыла подробности о том, на что способны пятипалые руки модели Neo. Они сконструированы для имитации движения сухожилий в руках человека. У рук Neo 25 степеней свободы, у человеческих — 27. 
Источник изображений: 1X Руки 1X Neo могут захватывать предметы необычной формы и обнаруживать, когда что-то из них выскальзывает. Пальцы движутся чрезвычайно быстро и разгибаются в направлениях, недоступных человеческим. Они имеют защиту от воды по стандарты IP68 — робот может сам помыть руки. «Диапазон движений может быть несколько экстремальным, но мы стараемся оставаться близкими к тому, что могут делать люди, чтобы можно было жить в этом мире», — рассказал директор по направлению приводов и рук 1X Джонатан Терфурт (Jonathan Terfurth). Производитель показал, на что способны пальцы робота. Он может вкрутить лампочку и зажечь её, аккуратно потянув за цепочку выключателя. В другой демонстрации 1X Neo вполне убедительно изъясняется на языке жестов. Но пока не вполне ясно, насколько эффективно робот может применять эти возможности. Когда журналисты поинтересовались, находился ли робот во время этих демонстраций в автономном режиме, или им управлял оператор, представитель компании пояснил: «Одни видео сняты в режиме машинных движений, а другие — в режиме дистанционного управления, чтобы показать предельные возможности оборудования». 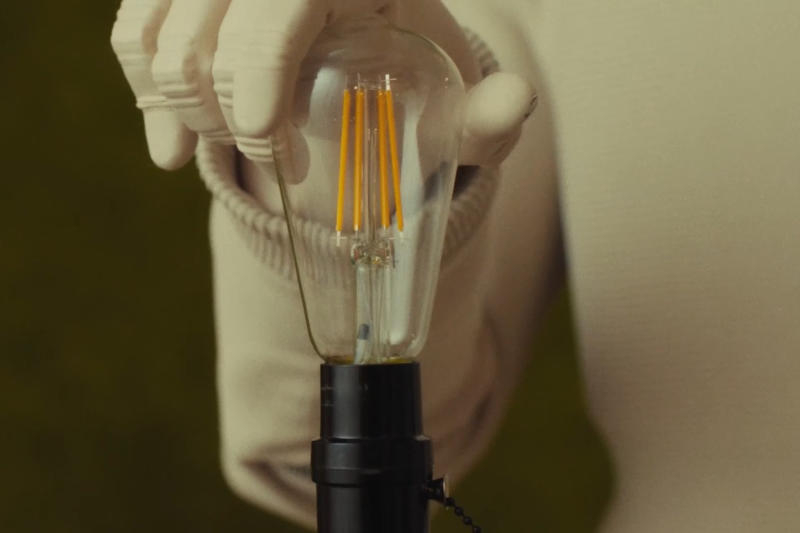 Имеющий мягкое текстильное покрытие 1X Neo разработан как максимально дружелюбная машина. Стоимость робота на этапе раннего доступа составляет $20 000 или $500 в месяц — приоритет при доставке отдаётся тем, кто вносит единовременную предоплату. Компания намеревается обеспечить Neo режим полной автоматизации, но робот до сих пор отчасти управляется дистанционно. Оператор может контролировать Neo удалённо и даже видеть его глазами — эта функция называется «экспертным режимом». В компании уточнили, что оператор компании подключается к роботу только по специальному запросу. В этом случае диапазон движений робота ограничивается, а лица людей и другая конфиденциальная информация размываются — транслируемое видео можно отслеживать через мобильное приложение. Когда 1X Neo находится в режиме удалённого управления, кольцевой индикатор вокруг уха робота загорается синим цветом; отключить оператора можно в любой момент. Как производитель намеревается защитить робота от взлома и перехвата управления хакерами, не уточняется. Во время сеанса видеосвязи с журналистами Wired вице-президент по продуктам и дизайну Дар Слипер (Dar Sleeper) попросил присутствующий экземпляр 1X Neo показать, как быстро он умеет двигать пальцами. Сперва робот поднимал и опускал пальцы очень неспешно, затем начал ускоряться — в итоге пальцы стали барабанить так быстро, что начали сливаться на экране. Демонстрацию робот прервал по голосовой команде. Mitsubishi начнёт выпускать по 1000 человекоподобных роботов в месяц в следующем году
10.07.2026 [13:31],
Алексей Разин
Многие автопроизводители исторически интересовались возможность выпуска человекоподобных роботов, и если некоторые предпочитали достигать этой фазы развития собственными силами, другие могли сотрудничать со специализированными компаниями или покупать их. Mitsubishi Motors при участии стартапа Highlanders намерена начать выпуск человекоподобных роботов в Японии со следующего года. 
Источник изображения: Highlanders.ai Примечательно, что производство роботов будет организовано на предприятии Mitsubishi Motors в Киото, и объёмы выпуска могут измеряться 1000 роботов в месяц. Автопроизводитель собирается применять этих роботов на собственных предприятиях для транспортировки деталей и сборки автомобильных двигателей. Как только эти роботы зарекомендуют себя с положительной стороны после внутренних испытаний, Mitsubishi Motors задумается о возможности их продажи сторонним компаниям, включая конкурирующих автопроизводителей. Глава корпорации Такао Като (Takao Kato) выразил уверенность, что для внедрения человекоподобных роботов на автосборочном производстве имеется огромный потенциал, поскольку те же логистические операции и сварочные работы они могут осуществлять вполне эффективно. Правда, как в этом контексте будут существовать классические промышленные роботы, в компании не уточняют. Поставщики автокомпонентов, по мнению главы Mitsubishi Motors, вполне удачно могут встроиться в экосистему производства и разработки человекоподобных роботов. В мае этого года Mitsubishi Motors вложилась в капитал японского стартапа Highlanders, который основан выходцами из Токийского университета, дальнейшие инвестиции тоже остаются на повестке дня. Mitsubishi надеется, что свой поздний выход на рынок человекоподобных роботов она компенсирует качеством их изготовления. По итогам прошлого года 85 % поставленных на мировой рынок человекообразных роботов были изготовлены китайскими компаниями. К 2035 году власти КНР хотят вывести эту отрасль национальной экономики в мировые лидеры. Власти Японии намерены к 2040 году ввести в эксплуатацию примерно 10 млн роботов с функциями ИИ. Государство намерено поддерживать исследовательские работы в этой сфере для достижения данной цели. Прежде чем стать безопасными соседями для людей, роботам предстоит ещё сильно усовершенствоваться
05.07.2026 [08:03],
Алексей Разин
Разработчики человекоподобных роботов спешат продемонстрировать серьёзный прогресс в их развитии, но за кадром остаются проблемы с их адаптацией к нахождению среди людей — разных и очень непредсказуемых. Прежде чем такое соседство станет социальной нормой, создателям роботов и программного обеспечения для них предстоит очень многое усовершенствовать. 
Источник изображения: UBTech Robotics Как повествует The Wall Street Journal, в социальных сетях гуляет немало сюжетов, которые демонстрируют не очень приятные примеры взаимодействия роботов с окружающими людьми. Один из роликов раскрывает неконтролируемые танцы человекоподобного робота в ресторане, другой показывает пнувшего маленького ребёнка робота во время выступления в Китае. Роботы, которые по своему предназначению должны постоянно находиться в непосредственной близости к человеку, становятся всё крупнее и тяжелее. Специалисты утверждают, что даже потеря электроснабжения в результате разрядки тяговой батареи способна повлечь неприятные для окружающих последствия, поскольку двуногий робот при падении может покалечить взрослого человека или ребёнка. Аналитики Morgan Stanley ожидают, что к 2050 году в мире будет эксплуатироваться 1 млрд человекоподобных роботов, а оборот профильного рынка достигнет $7,5 трлн. Робототехническая отрасль по мере перехода роботов из сферы промышленной автоматизации к домашнему применению сталкивается с новым вызовом: роботам нужно научиться работать в более непредсказуемой среде по сравнению с условиями производственного предприятия, где всё упорядочено в соответствии с технологическими процессами. Программное обеспечение для бытовых роботов будет ориентироваться на вероятностные оценки тех или иных событий, а не следовать строго прописанным алгоритмам. Искусственный интеллект в этом случае поможет разработчикам ПО, но совершенствовать его придётся долго и тщательно. Меры предосторожности необходимо будет закладывать изначально, как на уровне внешних физических кнопок принудительной остановки, так и на уровне защитных функций в схемотехнике. Помимо камер и датчиков непосредственно на корпусе робота, в этом деле помогут и окружающие устройства, с которыми робот сможет обмениваться информацией. Разработчики стараются предусмотреть разного рода функции безопасности. Компания Neura Robotics, например, в случае угрозы падения своего человекообразного робота заставляет его делать это с минимальным риском для окружающих. Кто-то из производителей роботов отказывается от использования ног в пользу более устойчивых оснований с колёсами. Тем более, что последние позволяют разместить и более ёмкую тяговую батарею. Низкий центр тяжести, в свою очередь, позволяет исключить падение в большинстве ситуаций. Кто-то из производителей ограничивает усилие, которое могут развивать роботы. Они при этом способны выполнять требуемые от них операции, но с меньшей вероятностью могут навредить человеку. Вместо тысяч датчиков одна дешёвая камера — роботов научили чувствовать пальцами
04.07.2026 [17:35],
Геннадий Детинич
Разработчики из Лондонского университета королевы Марии (Queen Mary University of London) представили мягкий тактильный сенсор, который позволяет роботам фактически видеть прикосновение: давление и деформация внутренней поверхности мягкой оконечности датчика сразу превращаются в цветовую картину, считываемую обычной камерой. Так без сложных алгоритмов робот моментально получает исчерпывающую информацию о том, к чему он прикоснулся. 
Источник изображения: ИИ-генерация ChatGPT/3DNews Не секрет, что осязание даётся роботам с трудом. В руке человека свыше 10 тыс. механорецепторов. Наделить робота подобной тактильной чувствительностью пока практически невозможно: либо недостаёт датчиков, либо нужны слишком сложные алгоритмы и вычислительные мощности. Британские учёные поступили хитро — они предложили прямо считывать деформацию мягкого датчика в месте касания как данные о рельефе поверхности и её механических свойствах. Ключевой элемент устройства — эластичный брэгговский отражатель, заключённый между двумя слоями мягкого силикона. При нажатии материал деформируется в зависимости от поверхности, к которой его прижимают, и он формирует определённую палитру цветов — пространственно распределённый цветовой узор не за счёт какого-либо красителя, а в силу изменения оптического отклика своей структуры. Эти цветовые узоры несут информацию о контакте, давлении и деформации, поэтому даже простая USB-камера может считывать карту нагрузки напрямую, без плотной сетки датчиков физического касания, сложной архитектуры и запредельных алгоритмов. 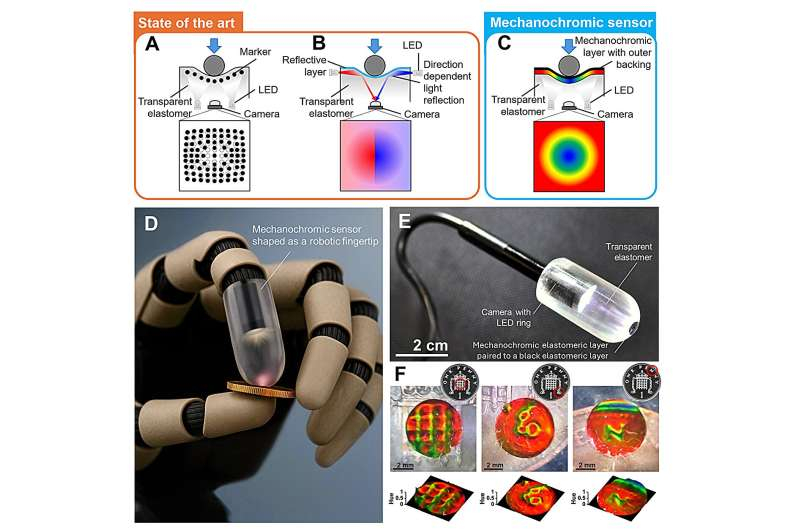
Источник изображения: Queen Mary University of London Предложенное решение позволяет забыть о необходимости компромисса между разрешением и скоростью. Классические тактильные датчики — ёмкостные, резистивные или пьезоэлектрические — работают в реальном времени, но ограничены размером чувствительных ячеек, расстоянием между ними, разводкой и взаимными помехами, что редко выводит их за пределы разрешения менее 1 мм. Тактильные датчики на основе машинного зрения способны видеть более мелкие детали, но требуют серьёзных вычислительных ресурсов. Предложенное британцами решение позволяет различать элементы поверхности с шагом около 100 мкм причём в реальном режиме времени без лишней нагрузки на процессор. Разработка поможет наделить роботизированные манипуляторы высокой тактильной чувствительностью для производственных, медицинских и бытовых нужд. Такая «кожа» может быть установлена на захваты для сборки микрокомпонентов, когда даже небольшое превышение давления способно повредить деталь. В случае протезов это даст богатую тактильную обратную связь, а в хирургических роботах поможет различать здоровые и повреждённые ткани на ощупь. Япония решила взять реванш на мировом рынке роботов с помощью ИИ
03.07.2026 [14:41],
Алексей Разин
В восьмидесятые годы прошлого века Япония славилась не только электроникой, но и робототехникой. С тех пор лидирующие позиции страны в этих сферах были утрачены, но местные производители с надеждой смотрят на ИИ, рассчитывая вдохнуть в роботов новую жизнь. Новые технологии значительно расширяют сферу использования робототехники. 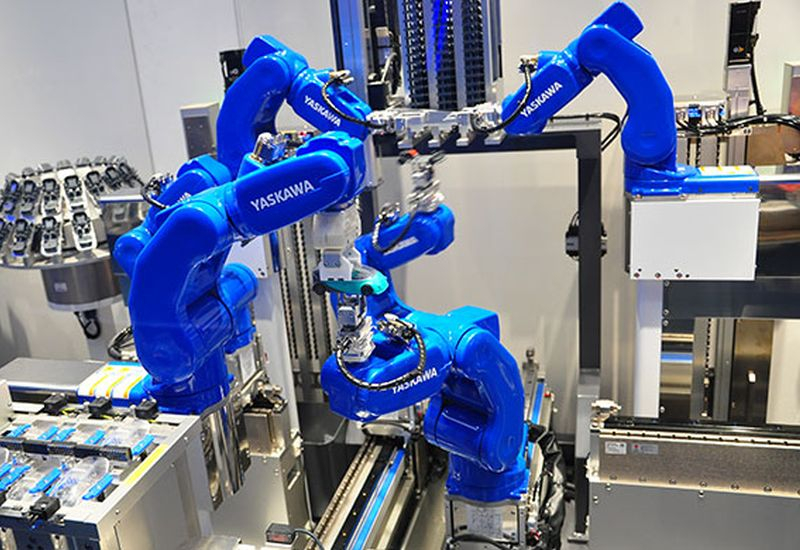
Источник изображения: Yaskawa Electric Как поясняет Nikkei Asian Review на примере японского производителя робототехнической продукции Yaskawa Electric, внедрение функций ИИ позволяет повысить эффективность применения роботов на производстве и поднять уровень автоматизации. По словам управляющего новой фабрики Yaskawa, производительность труда после внедрения роботов с функцией ИИ удалось удвоить. Сейчас примерно треть из 100 применяемых на предприятии роботов поддерживает функции искусственного интеллекта. Классические модели роботов этой марки могли выпускать на одной производственной линии не более двух или трёх типов продукции. Версия роботов с ИИ способна выпускать на одной линии 12 разных продуктов, что значительно повышает гибкость планирования производства. Семейство роботов Yaskawa Motoman Next было разработано при поддержке Nvidia, каждый из таких роботов оснащается собственным GPU и гибким программным обеспечением с широкими возможностями обучения. Простым примером разницы в эффективности новых и старых роботов может служить ситуация с затягиванием винтов. Если классический робот при неудачной попытке затянуть винт не будет доводить операцию до конца и потребует вмешательства человека, то робот нового поколения будет предпринимать повторные попытки добиться успеха. Статистика весьма благоприятна, поскольку новые роботы доводят операцию до конца почти в 100 % случаев. Yaskawa планирует поручить роботам довольно сложные по классическим меркам операции типа прокладки проводки или сборки сложных изделий. На предприятиях компании планируется довести уровень автоматизации с нынешних 40 до 90 %. Ещё в девяностые годы прошлого века японские роботы по объёмам производства занимали 80 % мирового рынка, но в последние годы их доля упала до 40 %. Внедрение ИИ поможет местным производителям отыграть хотя бы часть утраченных позиций. Рассчитывать на полноценный реванш вряд ли можно, поскольку европейские и особенно китайские конкуренты с тех пор ушли далеко вперёд. Компания Fanuc в мае этого года продемонстрировала прототип робота, понимающего запросы на естественном языке, включая распознавание текста с бумажных документов. Для их обработки используется платформа Google Gemini. Как поясняют представители Fanuc, с такими роботами могут взаимодействовать даже неквалифицированные сотрудники, не прошедшие длительной специализированной подготовки. Репутация японских производителей промышленного оборудования в этой сфере позволит им наладить поставки клиентам, желающим ощутить выгоду от внедрения ИИ. Weave представила бытового робота Isaac 1 — он будет наводить порядок, пока хозяев нету дома
02.07.2026 [16:41],
Геннадий Детинич
Американская Weave Robotics представила мобильного домашнего робота Isaac 1 («Айзек 1»), не блистающего гибкостью и ловкостью, но готового неспешно привести комнату в божеский вид, пока хозяев нет дома. Модель стала развитием стационарной версии Isaac 0, заточенной под складывание белья после стирки и сушки. 
Источник изображения: Weave Robotics «Айзек 1» получил колёсную базу, складной корпус и две подвижные руки, чтобы перемещаться по дому и работать в разных комнатах. Производитель заявляет два основных направления работы платформы: Laundry Flow — поиск и сбор грязной одежды, переноска корзин с одеждой, а также складывание и раскладывание вещей; и Daily Reset — «возврат» комнат в исходное состояние, включая уборку кроватей, аккуратное размещение подушек и одеяла, сбор игрушек и обуви, а также восстановление элементарного бытового порядка. Конструктивно «Айзек 1» выполнен в виде колёсного шасси с регулируемой по высоте верхней частью корпуса. Его основание занимает примерно 52 × 56 см, а высота изменяется примерно от 91 до 175 см. Робот способен дотянуться до предметов, расположенных на высоте до двух метров (203 см). Для шеи предусмотрены две степени свободы, для рук — шесть степеней свободы на каждую, по одной степени свободы для каждой кисти, по две — для торса и базы; суммарно робот имеет 21 степень свободы. Автономность по питанию заявлена на уровне восьми часов, время зарядки — два часа, связь осуществляется по Wi-Fi. Снаружи на робота установлены сменные тканевые оболочки. Они одновременно смягчают контакт с мебелью и людьми и делают устройство менее похожим на промышленного робота. Выдвижной торс позволяет ему вытягиваться до человеческого роста во время работы и уменьшаться, когда это не требуется. Колёсное шасси специально выбрано для использования в домашних условиях, чтобы повысить устойчивость платформы и, очевидно, сделать её дешевле. Если робот не способен выполнить операцию автономно, предусмотрена возможность телеуправления. Цена устройства составит $8000 при единовременной покупке или $449 в месяц по подписке с внесением депозита в размере $250. По некоторым данным, первые поставки «Айзека 1» стартуют осенью этого года, но массовая доступность ожидается в 2027 году. Интересно, думал ли Айзек Азимов, что его именем будут называть модели роботов? Об этом история умалчивает... Ant Group разогнала инвестиции в китайских человекоподобных роботов
02.07.2026 [09:57],
Павел Котов
Ant Group (входит в Alibaba) стала ключевым инвестором в раунде финансирования стартапа Zeroth, занимающегося созданием человекоподобных роботов. Гигант электронной коммерции вложил в стартап 500 млн юаней ($73,58 млн). 
Источник изображения: zeroth0.com Это уже двенадцатая компания в секторе робототехники, в которую Ant инвестировала с начала 2025 года: компания вложила средства в создателей человекоподобных роботов Galaxea и Unitree, а также в стартапы Linkerbot, Hypershell и Genrobot AI, которые специализируются на производстве компонентов и разработке ПО. В 2020 году китайские власти заблокировали выход Ant на биржу, и ответственная за платёжный сервис Alipay компания выпустила сначала приложение для медицинских услуг, а затем собственные модели искусственного интеллекта. В конце 2024 года Ant создала дочернюю компанию RobbyAnt, которая специализируется на роботах, и впоследствии она выпустила собственную человекоподобную машину. Ant также выпустила новую версию Alipay, совместимую с ИИ и робототехникой, и Zeroth изъявила желание сотрудничать в этой области. В последнем раунде финансирования Zeroth также приняли участие Monolith, Geely Capital, 37 Interactive Entertainment и Hua Capital — общий объём привлечённых средств увеличился до 1 млрд юаней ($147,16 млн). Компания была основана в конце 2024 года. Стартап планирует поэтапный подход к созданию человекоподобных роботов для дома — он начал с компаньонов для ухода за пожилыми людьми и домашними животными, а затем перешёл к роботам для обучения детей. К настоящему моменту Zeroth получила заказы на более чем 30 000 единиц, операционная выручка в первом полугодии выросла на 600 % год к году. Компания намеревается наладить продажи в Европе и Северной Америке, когда выполнит нормативные требования местных регуляторов. Нехватку людей восполнят машины: в Японии планируют внедрить 10 млн роботов к 2040 году
01.07.2026 [13:27],
Алексей Разин
Когда речь идёт о замене людей роботами, не все задумываются о том, что они будут активнее использоваться в тех сферах деятельности, которые для людей опасны или непривлекательны. Японские власти рассчитывают, что к 2040 году количество эксплуатируемых в стране роботов будет измеряться 10 млн штук, и некоторая их часть займётся обеспечением медицинского ухода за престарелыми и больными людьми. 
Источник изображения: UBTech Robotics Демографическая проблема японского общества заключается в том, что оно стремительно стареет, и для ухода за расширяющейся аудиторией пожилых граждан перестаёт хватать рабочих рук. По словам министра экономики, торговли и промышленности Японии Рёсэя Акадзавы (Ryosei Akazawa), на которого ссылается The Register, роботов нужно активнее внедрять не только в сфере здравоохранения, но и производства напитков и продуктов питания. Японское правительство для реализации этой программы готово увеличить инвестиции в создание ИИ-моделей для сферы робототехники и других физических воплощений подобных технологий. К участию в инициативе будут привлечены крупные японские компании, обладающие опытом в сфере робототехники: SoftBank, NEC, Sony Group и Honda Motor. Они объединят свои усилия в рамках консорциума Noetra, присоединиться к нему могут также Fujitsu и Rakuten, которые пока не подтвердили своего участия. По словам японского министра, местные компании обладают большим опытом использования роботов для ухода за престарелыми людьми, промышленного производства, устранения последствий стихийных бедствий, включая аварию на атомной станции в Фукусиме. Помимо обслуживания потребностей внутреннего рынка, Япония в ближайшие годы хотела бы превратиться в крупного игрока в мировой робототехнике. Помимо демографических проблем, японская экономика также страдает от строгого иммиграционного законодательства, которое в значительной мере ограничивает приток иностранной рабочей силы. Её также смогут заменить роботы во многих отраслях, причём без серьёзных социальных потрясений в условиях ограниченности людского ресурса. Южная Корея тоже собирается занять лидирующие позиции на мировом рынке робототехнической продукции. Местной компании Hyundai Motor, например, уже принадлежит американский разработчик Boston Dynamics, известный своими ловкими и быстрыми роботами. Роботов научат осваивать новые профессии без людей — достаточно ИИ и симуляции
29.06.2026 [17:15],
Владимир Мироненко
Гуманоидные роботы могут состязаться в преодолении марафона, танцевать и кувыркаться, но всё же их главное предназначение — выполнять всевозможные рутинные задачи. Швейцарский стартап Flexion Robotics разработал способ обучения роботов выполнению сложных задач, требующих простых навыков, с помощью симуляции и ИИ-алгоритмов. 
Источник изображения: Flexion Robotics Разработка Flexion Robotics предусматривает обучение отдельным приёмам и навыкам с помощью симуляции с последующим использованием ИИ-алгоритмов для определения способов их применения. В большинстве демонстрационных видеороликов показаны гуманоидные роботы, обучение которых выполнению конкретных задач, например складыванию рубашек или загрузке полок, осуществлялось с помощью телеуправления. Flexion утверждает, что её система более эффективна и надёжна, поскольку обучает роботов с использованием симуляции и при минимальном участии человека. Подход Flexion основан на объединении различных ИИ-систем. Основная ИИ-модель определяет, как выполнять задачу, анализируя видеозаписи действий людей. Затем ПО сопоставляет полученные в ходе симуляции навыки с видеозаписями и использует их для выполнения задач в реальном мире. Например, чтобы добраться до почтового отделения в офисе, модель определяет, что нужно открыть определённые двери и воспользоваться лифтом. Система также управляет приводами робота, обеспечивая ему сохранение равновесия, возможность перемещаться и управление конечностями. По словам Никиты Рудина (Nikita Rudin), соучредителя и генерального директора Flexion, ранее работавшего в NVIDIA, «секретный ингредиент» разработки компании — это широкое применение обучения с подкреплением. Этот подход используется на каждом уровне ПО — от основной модели ИИ до моделирования и управления приводами робота. Как ожидается, роботы-гуманоиды окажут огромное влияние на экономику, заменив людей при выполнении рутинных операций. Но, как показал опыт Flexion, для расширения возможностей роботов-гуманоидов потребуются фундаментальные достижения в области ИИ. Рудин сообщил, что Flexion сотрудничает с целым рядом робототехнических компаний, выпускающих различных роботов-гуманоидов, что позволит расширить число систем, поддерживаемых её ПО. |
© 1997—2026 Электронное периодическое издание "3ДНьюс" | Свидетельство о регистрации СМИ Эл ФС 77-22224
выдано Федеральной Службой по надзору за соблюдением законодательства в сфере массовых коммуникаций и охране культурного наследия
При цитировании документа ссылка на сайт с указанием автора обязательна. Полное заимствование документа является
нарушением
российского и международного законодательства и возможно только с согласия редакции 3DNews.








 MWC 2018
MWC 2018 2018
2018 Computex
Computex



