







 MWC 2018
MWC 2018 2018
2018 Computex
ComputexГруппа учёных из США опубликовала в журнале Science Robotics статью с описанием прыгающего робота. Он способен перепрыгивать с ветки на ветку и может использоваться в строительстве или лесном хозяйстве. Оснащение робота датчиками позволит проводить инспекцию сооружений и мониторинг окружающей среды, а также откроет множество новых способов применения для этой платформы, способной удерживать баланс в сложных условиях.





Источник изображений: Justin K. Yim
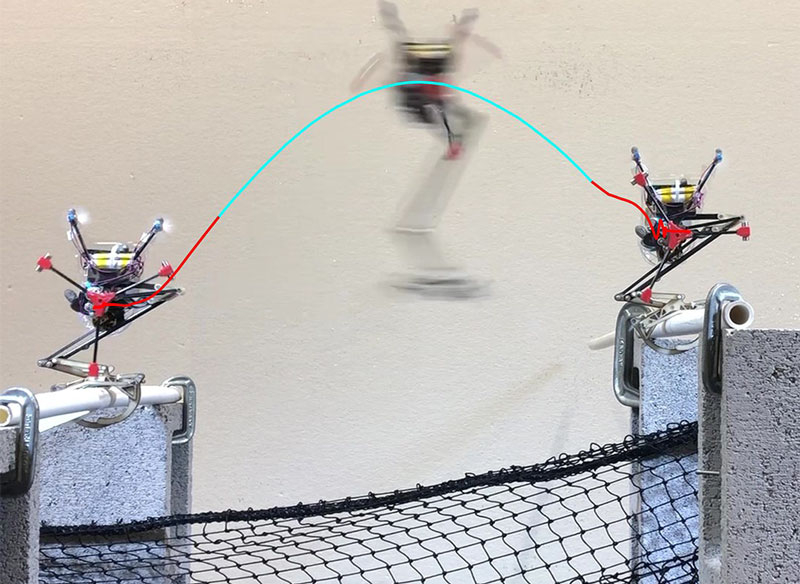
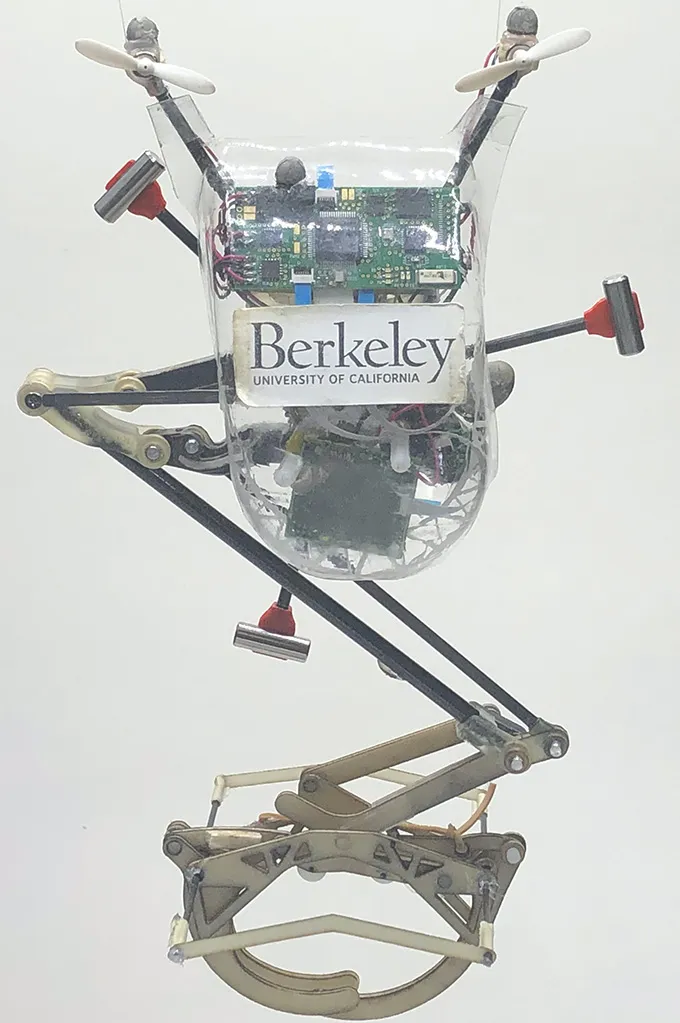
«Нас вдохновили белки», — объяснила Джастина Йим (Justin Yim), которая трудится в Университете Иллинойса в Урбане-Шампейне. Белки умеют компенсировать недолёты и перелёты при приземлении, балансируя телом таким образом, чтобы удержаться на месте, куда перепрыгнули. Учёные попытались воспроизвести похожие механизмы в небольшой роботизированной платформе с одной ногой. Для большей надёжности они снабдили её захватом, чтобы робот-белка не упал с опоры даже в случае потери баланса.
Сообщается, что в 25 из 30 попыток перепрыгнуть с одной тонкой ПВХ-трубы на другую робот смог приземлиться на столь маленькую цель. В двух случаях он сделал это идеально, оставшись в вертикальном положении, тогда как в остальных переворачивался и зависал на захватах. Это открыло путь для очередной модификации робота, направленной на создание более крепких захватов, подобно цепким когтям белок. В конечном итоге робот сможет прыгать с одной опоры на другую и делать это с мастерством живой белки. Однако, как уточняют исследователи, до этого пройдёт ещё немало времени.
Источник:





