|
Опрос
|
реклама
Быстрый переход
Google выпустила ИИ-модель Gemini Robotics 2, которая научила роботов двигаться почти как люди
30.07.2026 [23:49],
Анжелла Марина
Лаборатория искусственного интеллекта Google DeepMind представила ИИ-модель Gemini Robotics 2, которая получила возможность управлять всеми движениями гуманоидного робота. В отличие от предыдущей версии, отвечавшей главным образом за движения верхней части корпуса, новая система координирует действия от ступней до кончиков пальцев. 
Источник изображений: Google Благодаря новой модели роботы смогут выполнять более широкий круг задач, требующих согласованной работы всей конструкции. В опубликованном Google демонстрационном ролике робот Apollo 2 компании Apptronik ходит, приседает, наклоняется, поднимает лейку с пола, а также находит и снимает с полки нужные предметы. В Google DeepMind отметили, что скорость движений ещё, конечно, предстоит улучшать, однако это обновление является «важным шагом к обретению навыков, необходимых для выполнения более сложных задач в реальных условиях, требующих координации движений всего тела».  Одновременно была обновлена модель Gemini Robotics ER 2, отвечающая за анализ окружающей среды, понимание инструкций и выполнение более сложных многоэтапных действий. Новая версия дольше сохраняет контекст задачи, определяет её начало и завершение, а также позволяет нескольким роботам разных типов совместно выполнять одну работу. Например, в одном из примеров Apollo 2 координирует действия двурукого робота Google во время уборки гаража. Ранее 3DNews сообщал о версии Gemini Robotics 1.5 и Gemini Robotics-ER 1.5, которые совместно сначала «обдумывают» задачу и только потом выполняют действие. Кроме того, модель Gemini Robotics ER 2 получила расширенные функции безопасности и теперь лучше распознаёт присутствие людей рядом, автоматически запуская защитный механизм для остановки робота, если человек подходит слишком близко. Компания также сообщила об улучшении локальной модели Gemini Robotics On-Device Model, способной работать непосредственно на самом роботе без подключения к интернету. Китай пригрозил США из-за запрета на импорт человекоподобных роботов
30.07.2026 [17:52],
Павел Котов
Ранее стало известно, что Федеральная комиссия по связи (FCC) США намерена запретить ввоз в страну роботов иностранного производства — от пылесосов до человекоподобных машин. Больнее всего запрет ударит по Китаю, и тот пригрозил американским властям последствиями. 
Источник изображения: unitree.com FCC неоднократно игнорировала, что позиция Пекина в отношении запретов на ввоз той или иной продукции носит сдержанный характер, заявили в Министерстве торговли Китая, но новые меры могут возыметь для США последствия. Американское ведомство продолжает ужесточать ограничения на китайские товары, что «серьёзно подрывает экономическую и торговую стабильность Китая и США», добавили в китайском минторге. Он призвал США отозвать это решение и пригрозил контрмерами, если FCC этого не сделает. В сентябре президент США Дональд Трамп (Donald Trump) планирует принять председателя КНР Си Цзиньпина (Xi Jinping), но напряжённость вокруг технологической гонки двух стран усилилась: министр финансов США Скотт Бессент (Scott Bessent) пригрозил Китаю санкциями за предполагаемую «кражу» моделей искусственного интеллекта. Сам глава американского государства допустил, что власти могут занять более сдержанную позицию в отношении регулирования ИИ, чтобы США смогли сохранить технологическое лидерство над Китаем. Китайские компании Agibot, Unitree и UBTech составляют тройку мировых лидеров в области человекоподобных роботов, гласят данные Counterpoint, — Tesla с её Optimus на мировом рынке лишь пятая. Торгующиеся на гонконгской бирже акции UBTech сегодня потеряли более 6 %; Unitree и Agibot пока не стали публичными. Североамериканский дистрибьютор китайских человекоподобных роботов Robostore объявил о намерении наладить контакты с поставщиками из США. В США создали робокентавра для спасателей — он умеет пользоваться человеческими инструментами
30.07.2026 [14:05],
Геннадий Детинич
Калифорнийский стартап Satyress («Сатиресса») создал дистанционно управляемого робота Threehalves высотой около двух метров, предназначенного для работы в местах с высоким риском для людей. Конструкция робота напоминает кентавра: похожий на человеческий торс установлен на платформе с четырьмя ногами. Ожидается, что это поможет ему уверенно передвигаться по завалам и пересечённой местности. При этом робот способен сходу пользоваться человеческими инструментами. 
Источник изображений: Satyress Threehalves пока не позиционируется как автономная машина: оператор управляет его движениями с безопасного расстояния при помощи джойстика. Вместо намертво закреплённых на роботе рук используется модульная система конечностей, позволяющая за несколько минут менять рабочую конфигурацию и устанавливать инструменты для конкретных работ, например цепную пилу, дрель или шуруповёрт. Унификация компонентов должна упростить ремонт в полевых условиях, а опора на четыре конечности обеспечит потенциально лучшую устойчивость, чем у двуногих роботов. 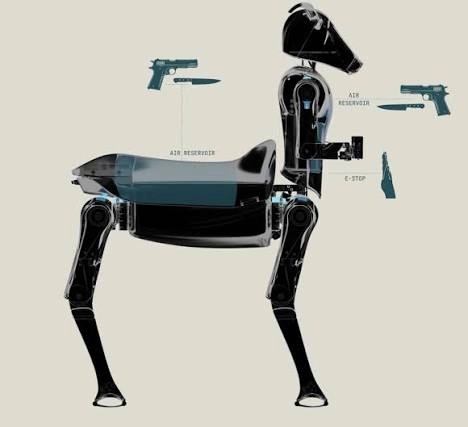 Особое внимание разработчики уделили аварийному отключению мощной машины. Робот способен остановиться после распознавания жеста в виде поднятой ладони. В качестве крайней меры на корпусе размещены баллоны высокого давления: их можно проколоть тем или иным способом (ножом, выстрелом или иными средствами), после чего система сбрасывает давление и механически обездвиживает робота. Тормоза также блокируют механизмы при потере электропитания или давления в пневматической системе.  Несмотря на высоту, Threehalves удобно складывается для перевозки. Утверждается, что два робота могут разместиться рядом в кузове пикапа длиной около 1,7 м. Однако разработчик пока не раскрывает массу аппарата, грузоподъёмность, скорость, время автономной работы, дальность связи и степень защиты от воды, пыли, дыма и высокой температуры. Цена, сроки выпуска и прохождение обязательной сертификации также не объявлены, поэтому на данном этапе Threehalves следует рассматривать, прежде всего, как перспективный прототип, которому ещё предстоит подтвердить работоспособность в реальных аварийно-спасательных операциях.  Добавим, четвероногие машины уже находятся в разработке, как и двуногие. Китайские инженеры развили идею от робопсов до робоконей и даже предлагают своеобразный двуногий робоприцеп для человека, превращающий его в кентавра. Японцы же создают настоящий четвероногий мотоцикл для передвижения по бездорожью. У эволюции не сложилось с колёсами. Человек это исправил и теперь готов заимствовать идеи для транспорта повышенной проходимости у природы, которая лучше четырёх ног для этого ничего не придумала. 
И глаза такие добрые... при этом поигрывая рукояткой газа бензопилы Одноколёсный робокоп: стартап Rollo Robotics показал прототип робота-патрульного 1Rollo
29.07.2026 [17:33],
Павел Котов
Эстонский стартап Rollo Robotics построил функциональный прототип 1Rollo — одноколёсного робота, предназначенного для патрулирования охраняемых территорий. 
Источник изображения: 1rollo.com Идея проекта состоит в том, что по принадлежащей владельцу территории перемещается робот с поддержкой искусственного интеллекта. Он ориентируется в пространстве при помощи системы компьютерного зрения с обзором на 360°, GNSS-позиционирования и коррекции посредством системы RTK (Real-Time Kinematic). Камеры и другие сенсоры используются для выявления препятствий и предотвращения столкновений с ними, а также для «обнаружения аномалий». Обнаружив нечто подозрительное, робот передаёт человеку-оператору оповещение через сеть мобильной связи или Wi-Fi. При необходимости оператор может вызвать на место инцидента охранника или пообщаться с людьми в кадре прямо через робота, оснащённого встроенными динамиками и микрофоном. Используя облачную платформу, оператор сумеет удалённо контролировать целый парк 1Rollo. За поддержание роботом равновесия отвечает вертикально ориентированный маховик, расположенный на одной линии с основным колесом. Поворот влево или вправо осуществляется наклоном этого маховика в соответствующую сторону. 1Rollo разгоняется до 30 км/ч, полного заряда аккумулятора хватает на срок до восьми часов автономной работы. Rollo Robotics намеревается выпустить роботов на рынок в следующем году, но купить их не получится — производитель будет предоставлять их по подписке. Это поможет клиентам снизить эксплуатационные расходы и обеспечит им «постоянный доступ к новейшему оборудованию, ПО и поддержке без первоначальных вложений». США готовят запрет на импорт роботов — под ударом даже роботы-пылесосы
29.07.2026 [10:43],
Павел Котов
Американские власти ведут новый запрет на импорт «передовых роботизированных устройств» и силовых инверторов, произведённых за рубежом. Запрет будет распространяться на человекоподобных, четвероногих и других роботов, включая бытовые, заявили в Федеральной комиссии по связи (FCC) США. 
Источник изображения: unitree.com Эта мера не направлена против какой-либо конкретной страны, заверили в FCC, но она окажет существенное влияние на Китай, который наращивает усилия по производству человекоподобных роботов. В Китае также расположены ведущие мировые производители инверторов: Sungrow и уже внесённая в чёрные список Huawei — это оборудование используется с солнечными батареями и другими системами возобновляемой энергии. В качестве причины радикальной меры значатся «неприемлемые риски для национальной безопасности соединённых Штатов или безопасности граждан Соединённых Штатов». Под «передовыми роботизированными устройствами» в ведомстве понимается машина, способная к «передвижению, обходу препятствий, навигации или перемещению по земле», оснащённая воспринимающим окружение датчиком и имеющая чип для сетевого подключения. Его масса должна составлять более 2 кг, включая док-станцию, если таковая имеется. Под это определение подпадают и роботы-пылесосы — FCC напомнила об инциденте с проблемами безопасности DJI Romo. Как и в случае с запрещёнными в США по общему правилу маршрутизаторами иностранного производства, любая компания может запросить исключение, если хочет и далее ввозить новую продукцию в страну; такая заявка не предполагает требований по повышению безопасности роботов или инверторов. Существующее оборудование в США под запрет не подпадает — частные лица и компании могут пользоваться им и дальше. Роботы и инверторы смогут получать обновления безопасности и совместимости до 1 января 2029 года. Видеообзор робота-пылесоса Midea VCR V15 EVO ULTRA
22.07.2026 [09:00],
Андрей Созинов
Современный робот-пылесос должен не только качественно убирать, но и требовать минимум внимания со стороны владельца. Именно на это делает ставку Midea VCR V15 EVO ULTRA, оснащенный станцией самоочистки, системой автоматической мойки и сушки швабр, а также мощной системой сухой и влажной уборки.  В этом видео мы протестируем возможности устройства, оценим качество уборки на разных типах покрытий, разберем особенности конструкции и мобильного приложения, а также выясним, почему V15 EVO ULTRA можно назвать одним из наиболее привлекательных роботов-пылесосов по соотношению цены и возможностей. Помогать OpenAI создавать роботов будет выходец из китайского автопроизводителя Xpeng
21.07.2026 [12:45],
Алексей Разин
Даже если оставить за скобками выпуск китайской компанией Xpeng близкого по характеристикам конкурента Tesla Model Y, американскому сопернику этот стартап подражает и в других сферах — например, в разработке человекоподобных роботов. Один из руководителей профильного направления перейдёт на работу из Xpeng в OpenAI. 
Источник изображения: Xpeng По крайней мере, об этом сообщает китайское издание CnEVPost со ссылкой на Leiphone, говоря о готовности главы подразделения ИИ-инфраструктуры Лю Сиюаня (Lu Siyuan) перейти на работу из Xpeng в американскую компанию OpenAI. На изначальном месте работы Люс Сиюань руководил созданием ИИ-инфраструктуры китайского автопроизводителя, ему подчинялось около 200 специалистов. В OpenAI он, как ожидается, будет курировать направление создания аппаратных роботов. Опыт Лю, полученный за время работы в Xpeng, весьма обширен, поскольку он отвечал как за обучение ИИ-моделей, так и за развёртывание вычислительной инфраструктуры, адаптацию ПО к чипам Xpeng собственной разработки, оптимизацию ИИ-моделей и внедрение элементов инференса в бортовое ПО автомобилей. Всё это также внедрялось в массовом производстве под руководством Лю Сиюаня. По примеру Xpeng, китайский стартап Li Auto (Lixiang) по итогам недавнего рестайлинга своих гибридов внедрил использование чипов собственной разработки, но первая из компаний такой курс взяла уже давно. После ухода Лю, как ожидается, его подчинённые будут поделены на три более независимые группы, каждая из которых обзаведётся собственным руководителем. Кроме того, кадровый состав команды Xpeng, занимающейся созданием автопилота, претерпит и другие изменения в обозримом будущем, если верить источнику. Xpeng собирается приступить к массовым поставкам человекоподобных роботов в следующем квартале. В следующем году компания предложит фирменные технологии активной помощи водителю на рынках присутствия за пределами КНР. Кстати, в прошлом месяце Xpeng покинул Ми Лянчуань (Mi Liangchuan), который возглавлял робототехнический бизнес компании. Бывший руководитель разработки технологий автопилота Ли Лиюнь (Li Liyun) после ухода из Xpeng в октябре прошлого года перешёл на работу в стартап EngineAI Robotics, который также занимается роботами. Разработана одежда, которая сама надевается на человека
17.07.2026 [18:53],
Павел Котов
Группа южнокорейских и американских инженеров представила роботизированную технологию, которая позволяет человеку одеваться, не используя рук и не прибегая к помощи других — она окажется полезной при работе в чистых помещениях и станет подспорьем для экстренных служб, передаёт Reuters. 
Источник изображения: reuters.com Основу конструкции составляют встроенные в одежду мягкие и гибкие стержни, напоминающие лозу — они приводятся в движение под давлением воздуха. Эти стержни скользят близко к телу человека, как взбирающийся по ограждениям плющ, даже если этот человек стоит на месте. «Робот-лоза находится рядом с человеком и одевает его, выворачивая одежду наизнанку по ходу движения, что позволяет [механизму] стабильно карабкаться по форме тела», — рассказал ведущий разработчик проекта Ким Нам Гюн (Kim Nam Gyun). Полностью на тело костюм надевается за десять секунд. Элементы конструкции увеличиваются в размерах, а не перемещаются по телу, благодаря чему движение по изогнутым поверхностям человеческого тела остаётся стабильным. «Он может проходить через узкие щели, расти, адаптируясь к форме и двигаться независимо от того, скользкая ли поверхность, липкая или неровная», — пояснил другой разработчик Рю Джи Хван (Ryu Jee-Hwan). Роботизированная одежда будет полезной пожилым людям и инвалидам, работникам на полупроводниковых производствах и сотрудникам служб, занятых на ликвидациях последствий аварий. В Китае прошёл первый международный турнир по боям человекоподобных роботов — одному оторвали голову
17.07.2026 [14:58],
Павел Котов
Накануне в Китайском Шэньчжэне прошло мероприятие под названием Ultimate Robot Knock-out Legend (URKL) — первый в мире турнир по боям без правил среди человекоподобных роботов, организованный местной компанией EngineAI. 
Источник изображения: EngineAI В матче сошлись настоящие, полноразмерные человекоподобные машины, которые перед живой аудиторией молотили друг друга кулаками, ногами и проводили манёвры уклонения. Для участия в соревновании были отобраны 32 команды со всего мира, и все они в качестве стандартной боевой платформы выставляли модель EngineAI T800. Один из наиболее драматичных моментов случился, когда во время бою некоему роботу оторвало голову. Утратив функции установленных на голове датчиков, он продолжил бить и держать удары, завершив матч благодаря установленным на туловище системам — это была демонстрация прочности и ударостойкости машины. EngineAI T800 имеет рост 1,73 м; он способен выполнять сложные движения, в том числе наносит апперкоты, бьёт ногой с разворота и быстро встаёт после падения на землю. У робота, уверяет производитель, мощная система контроля осанки, динамическое восприятие и функции амортизаторов, разработанные для боёв высокой интенсивности. Производитель хочет использовать соревнование как стимул для дальнейших исследований и развития отрасли. Турнир подтверждает, насколько продвинулись передовые технологии: механическая структурная балансировка, интеллектуальное принятие решений в миллисекунды и мультимодальная координация сенсоров. Обратная связь в реальных боевых сценариях ускорит переход интеллектуальных роботов от лабораторных прототипов к коммерческому применению, уверены в EngineAI. Прошедшие соревнования — больше чем демонстрация грубой силы. В URKL роботы оцениваются по четырём критериям: эффективности ударов, устойчивости корпуса, способности к защите и уклонению, а также общей прочности. Видеообзор робота-пылесоса Midea VCR V15 MAX ULTRA
17.07.2026 [09:00],
Андрей Созинов
Роботы-пылесосы давно перестали быть просто автоматическими уборщиками, но далеко не каждая модель способна действительно избавить владельца от ежедневной рутины. Midea VCR V15 MAX ULTRA предлагает именно такой подход: интеллектуальная навигация, распознавание препятствий, высокая мощность всасывания и многофункциональная станция самоочистки позволяют доверить уборку практически без остатка.  В этом обзоре мы подробно рассмотрим возможности флагманской модели, проверим эффективность сухой и влажной уборки в реальных условиях, расскажем о фирменных технологиях Midea и разберемся, насколько V15 MAX ULTRA оправдывает статус одного из самых интересных роботов-пылесосов в своем ценовом сегменте. Робопсу Spot от Boston Dynamics нашли новую работу — теперь он доставляет посылки
15.07.2026 [00:09],
Николай Хижняк
Компания Boston Dynamics тестирует новый способ использования робота-собаки Spot в качестве доставщика товаров в рамках «последней мили». Для четвероногого робота разработали специальную компактную конвейерную ленту, с помощью которой он может самостоятельно выгружать заказанные товары у дверей клиентов, выступая помощником курьера. Такой подход призван снизить нагрузку на курьеров. 
Источник изображения: Boston Dynamics Для доставки товаров клиентам некоторые логистические и технологические компании уже несколько лет используют колёсных роботов-доставщиков и даже беспилотные летательные аппараты. Однако люди по-прежнему справляются с этой задачей гораздо лучше, особенно если речь идёт о необходимости преодоления различных препятствий (лестниц, узких проходов и т. д.) на пути доставки товара клиенту в рамках так называемой «последней мили», то есть участка пути от транспортного средства до двери клиента. В Boston Dynamics считают, что с этой задачей вполне может справиться робот-собака Spot. Компания продемонстрировала это на видео. На нём курьер подъезжает к нужному месту доставки, открывает дверь фургона и выпускает робота Spot. Затем он передаёт роботу коробки с товаром, которые нужно доставить по нескольким соседним адресам. Spot добирается до нужного порога дома и аккуратно выгружает товар с помощью конвейерной ленты. Boston Dynamics заявляет, что «уже ведёт переговоры с крупными логистическими компаниями о тестировании Spot в качестве решения для доставки в рамках “последней мили”», и текущая цель компании — перейти от этих демонстраций к полномасштабному пилотному проекту.  Уникальная способность робота Spot преодолевать неровную местность и сложные препятствия может способствовать его использованию в качестве помощника курьера. Как отмечает The Verge, роботы Spot нередко применяются для разбора завалов в рамках поисково-спасательных операций, и компания Boston Dynamics считает, что эти возможности могут сделать их подходящим для передвижения по «неструктурированным территориям пригородных районов», где путь от тротуара до входной двери редко бывает свободным от различных препятствий.  Робот не только поможет снизить физическую нагрузку на водителей-курьеров, но и даст им больше времени для других задач, например, подготовки следующей доставки, пока Spot доставляет текущий груз, что потенциально может повысить эффективность курьерской службы. Но без ложки дёгтя никак: цена каждого робота Spot составляет $75 тыс. Tesla разгромила собственный завод по производству Model S и Model X во Фримонте
11.07.2026 [14:21],
Владимир Мироненко
Tesla опубликовала видеоролик с показом демонтажа производственной линии по сборке электромобилей Model S и Model X на своем заводе во Фримонте в Северной Калифорнии, который был выполнен в рекордные сроки в связи с перепрофилированием завода на выпуск человекоподобных роботов Tesla Optimus. 
Источник изображения: Tesla На работы по демонтажу ушло всего 46 дней. При этом была проведена разборка бетонных котлованов с использованием специальной тяжёлой техники, демонтаж роботизированных манипуляторов и конвейеров, а также расчистка пространства для установки новых производственных линий. О решении прекратить производство Model S и Model X было объявлено во время телефонной конференции Tesla по итогам четвертого квартала 2025 года, прошедшей в конце января 2026 года. Генеральный директор компании Илон Маск (Elon Musk) сообщил, что производство флагманских моделей будет свёрнуто к концу второго квартала 2026 года. Приём заказов на седан и кроссовер был прекращён в начале апреля 2026 года, а последние автомобили сошли с конвейера в начале мая. Двадцатого мая состоялась специальная церемония вручения электромобиля, которая подвела итог их производству. Маск сообщил на конференции, что на заводе будет установлена специализированная линия по производству Optimus с целевым показателем мощности в 1 млн единиц в год. Отвечая на вопросы пользователей по поводу объёмов выпуска роботов, он предупредил, что на первых порах производство будет наращиваться медленно, несмотря на недавний прогресс на производственной линии. «Производство Optimus будет крайне медленным на первых порах, поскольку всё новое. Это не то же самое, что производство автомобиля», — сообщил он в социальной сети Х. У домашнего человекоподобного робота 1X Neo оказались невероятно быстрые пальцы
11.07.2026 [08:40],
Павел Котов
Норвежско-американская компания 1X, которая специализируется на робототехнике, раскрыла подробности о том, на что способны пятипалые руки модели Neo. Они сконструированы для имитации движения сухожилий в руках человека. У рук Neo 25 степеней свободы, у человеческих — 27. 
Источник изображений: 1X Руки 1X Neo могут захватывать предметы необычной формы и обнаруживать, когда что-то из них выскальзывает. Пальцы движутся чрезвычайно быстро и разгибаются в направлениях, недоступных человеческим. Они имеют защиту от воды по стандарты IP68 — робот может сам помыть руки. «Диапазон движений может быть несколько экстремальным, но мы стараемся оставаться близкими к тому, что могут делать люди, чтобы можно было жить в этом мире», — рассказал директор по направлению приводов и рук 1X Джонатан Терфурт (Jonathan Terfurth). Производитель показал, на что способны пальцы робота. Он может вкрутить лампочку и зажечь её, аккуратно потянув за цепочку выключателя. В другой демонстрации 1X Neo вполне убедительно изъясняется на языке жестов. Но пока не вполне ясно, насколько эффективно робот может применять эти возможности. Когда журналисты поинтересовались, находился ли робот во время этих демонстраций в автономном режиме, или им управлял оператор, представитель компании пояснил: «Одни видео сняты в режиме машинных движений, а другие — в режиме дистанционного управления, чтобы показать предельные возможности оборудования». 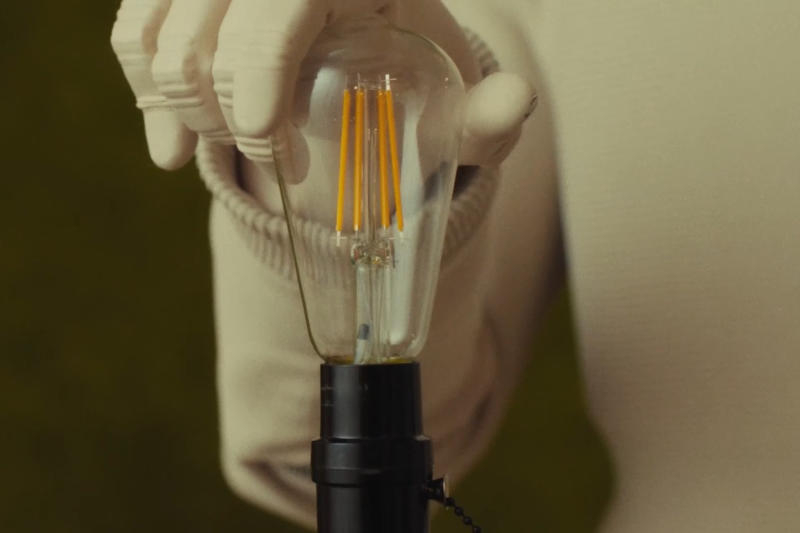 Имеющий мягкое текстильное покрытие 1X Neo разработан как максимально дружелюбная машина. Стоимость робота на этапе раннего доступа составляет $20 000 или $500 в месяц — приоритет при доставке отдаётся тем, кто вносит единовременную предоплату. Компания намеревается обеспечить Neo режим полной автоматизации, но робот до сих пор отчасти управляется дистанционно. Оператор может контролировать Neo удалённо и даже видеть его глазами — эта функция называется «экспертным режимом». В компании уточнили, что оператор компании подключается к роботу только по специальному запросу. В этом случае диапазон движений робота ограничивается, а лица людей и другая конфиденциальная информация размываются — транслируемое видео можно отслеживать через мобильное приложение. Когда 1X Neo находится в режиме удалённого управления, кольцевой индикатор вокруг уха робота загорается синим цветом; отключить оператора можно в любой момент. Как производитель намеревается защитить робота от взлома и перехвата управления хакерами, не уточняется. Во время сеанса видеосвязи с журналистами Wired вице-президент по продуктам и дизайну Дар Слипер (Dar Sleeper) попросил присутствующий экземпляр 1X Neo показать, как быстро он умеет двигать пальцами. Сперва робот поднимал и опускал пальцы очень неспешно, затем начал ускоряться — в итоге пальцы стали барабанить так быстро, что начали сливаться на экране. Демонстрацию робот прервал по голосовой команде. Роботы Unitree G1 под дистанционным управлением прооперировали живых свиней
10.07.2026 [20:59],
Павел Котов
Учёные Калифорнийского университета в Сан-Диего осуществили уникальный медицинский эксперимент — дистанционно управляемые хирургами человекоподобные роботы Unitree G1 удалили двум живым свиньям жёлчные пузыри. 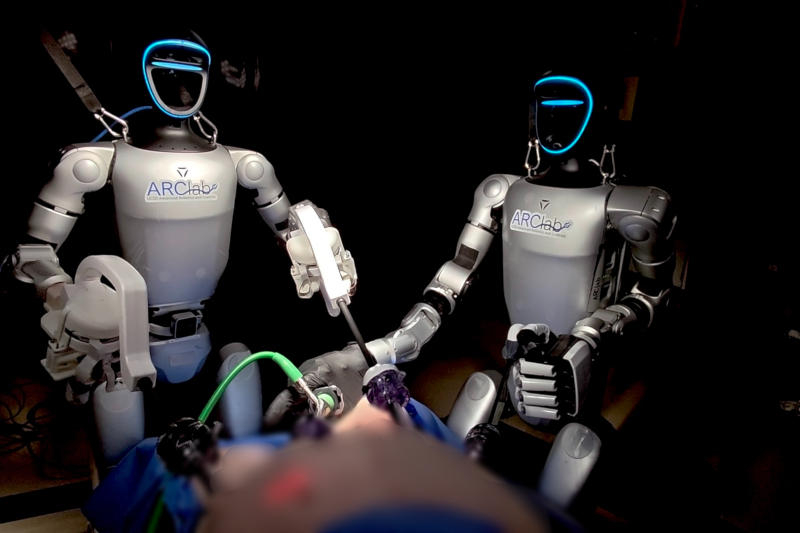
Источник изображения: humanoid-surgeon.github.io Если этот подход станет клинически целесообразным для пациентов-людей, хирурги смогут использовать таких человекоподобных роботов для дистанционного проведения операций в небольших больницах и клиниках, где не хватает ресурсов для установки специализированных, но дорогостоящих хирургических роботов. В эксперименте использовался человекоподобный Unitree G1, произведённый в Китае. Самый недорогой вариант этой модели стоит $13 500 плюс от $300 за доставку, но у данной версии фактически нефункциональные руки — с подходящими для хирургических операций руками стоимость машины превышает $67 000. Для сравнения: одобренный американскими регуляторами в сфере здравоохранения робот da Vinci от Intuitive Surgical стоит от $500 тыс. до нескольких миллионов долларов. Масса хирургического робота составляет около 800 кг, и он занимает много места в операционной, тогда как человекоподобные роботы Unitree имеют рост 1,5 м при массе всего 27 кг. Для проведения экспериментальной операции учёным пришлось создать адаптеры, позволяющие роботам удерживать хирургические инструменты. Они также разработали ПО, которое преобразует интуитивные движения человеческих рук в точное управление хирургическими инструментами, закреплёнными на запястьях роботов. Управляющий роботом хирург видел действия машины через стереоскопический дисплей, а её движениями управлял при помощи ножной педали. В ходе первой операции роботу ассистировал человек, а вторую провели уже два робота. Эксперимент прошёл небезупречно. Операцию несколько раз приходилось прерывать на несколько минут, чтобы перекалибровать роботов или переместить руку машины в нужное положение. Кроме того, рабочая зона руки Unitree G1 составляет всего 450 мм, тогда как у человека этот показатель равен 1,6–1,8 м, что также ограничивало возможности удалённых операторов. Наконец, задержка при дистанционном управлении человекоподобным роботом измеряется сотнями миллисекунд, тогда как для работы в качестве хирурга этот показатель не должен превышать 150 мс, установили исследователи. Mitsubishi начнёт выпускать по 1000 человекоподобных роботов в месяц в следующем году
10.07.2026 [13:31],
Алексей Разин
Многие автопроизводители исторически интересовались возможность выпуска человекоподобных роботов, и если некоторые предпочитали достигать этой фазы развития собственными силами, другие могли сотрудничать со специализированными компаниями или покупать их. Mitsubishi Motors при участии стартапа Highlanders намерена начать выпуск человекоподобных роботов в Японии со следующего года. 
Источник изображения: Highlanders.ai Примечательно, что производство роботов будет организовано на предприятии Mitsubishi Motors в Киото, и объёмы выпуска могут измеряться 1000 роботов в месяц. Автопроизводитель собирается применять этих роботов на собственных предприятиях для транспортировки деталей и сборки автомобильных двигателей. Как только эти роботы зарекомендуют себя с положительной стороны после внутренних испытаний, Mitsubishi Motors задумается о возможности их продажи сторонним компаниям, включая конкурирующих автопроизводителей. Глава корпорации Такао Като (Takao Kato) выразил уверенность, что для внедрения человекоподобных роботов на автосборочном производстве имеется огромный потенциал, поскольку те же логистические операции и сварочные работы они могут осуществлять вполне эффективно. Правда, как в этом контексте будут существовать классические промышленные роботы, в компании не уточняют. Поставщики автокомпонентов, по мнению главы Mitsubishi Motors, вполне удачно могут встроиться в экосистему производства и разработки человекоподобных роботов. В мае этого года Mitsubishi Motors вложилась в капитал японского стартапа Highlanders, который основан выходцами из Токийского университета, дальнейшие инвестиции тоже остаются на повестке дня. Mitsubishi надеется, что свой поздний выход на рынок человекоподобных роботов она компенсирует качеством их изготовления. По итогам прошлого года 85 % поставленных на мировой рынок человекообразных роботов были изготовлены китайскими компаниями. К 2035 году власти КНР хотят вывести эту отрасль национальной экономики в мировые лидеры. Власти Японии намерены к 2040 году ввести в эксплуатацию примерно 10 млн роботов с функциями ИИ. Государство намерено поддерживать исследовательские работы в этой сфере для достижения данной цели. |
© 1997—2026 Электронное периодическое издание "3ДНьюс" | Свидетельство о регистрации СМИ Эл ФС 77-22224
выдано Федеральной Службой по надзору за соблюдением законодательства в сфере массовых коммуникаций и охране культурного наследия
При цитировании документа ссылка на сайт с указанием автора обязательна. Полное заимствование документа является
нарушением
российского и международного законодательства и возможно только с согласия редакции 3DNews.








 MWC 2018
MWC 2018 2018
2018 Computex
Computex