







 MWC 2018
MWC 2018 2018
2018 Computex
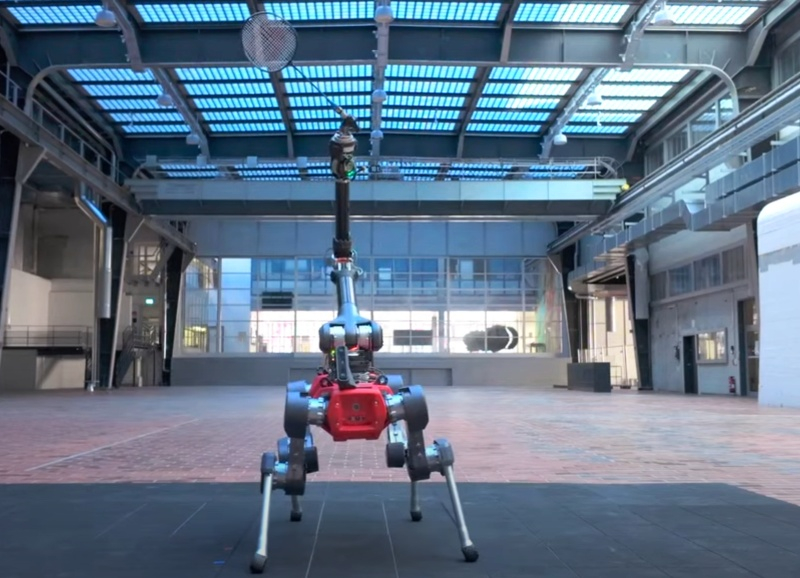
ComputexГруппа учёных из ETH Zürich под руководством робототехника Юньтао Ма (Yuntao Ma) представила робота, способного играть в бадминтон. Робот ANYmal внешне напоминает миниатюрного жирафа с ракеткой «в зубах», и создан на базе четвероногого промышленного робота, предназначенного для работы в нефтегазовой отрасли, от компании ANYbotics. Вес ANYmal составляет около 50 кг, длина корпуса — менее метра, а ширина — менее 50 сантиметров.






Источник изображений: ETH Zürich
На робота установлен манипулятор с несколькими степенями свободы, в который закреплена бадминтонная ракетка. Отслеживание полёта волана и мониторинг окружающей среды осуществляется с помощью стереоскопической камеры. По словам разработчиков, на создание робота ушло около пяти лет.
При разработке системы управления ANYmal были использованы современные методы обучения моделей ИИ с подкреплением. «Вместо того чтобы строить продвинутые модели, мы смоделировали робота в виртуальной среде и позволили ему научиться двигаться самостоятельно», — пояснил Ма. Обучение разбивалось на повторяющиеся блоки, в каждом из которых робот должен был предсказать траекторию полёта волана и попытаться его отбить. В ходе этого процесса ANYmal, как настоящий спортсмен, также определял пределы своих физических возможностей.
Обучение было направлено на развитие зрительно-моторной координации, аналогичной той, которой обладают спортсмены-люди. Модель восприятия, основанная на данных с камеры в реальном времени, обучала робота удерживать волан в поле зрения, несмотря на помехи и ошибки отслеживания. «Представьте, что робот занимает позицию для приёма волана, — рассказал Ма. — Если он движется медленно, шансы на успех снижаются. Если быстро — тряска камеры увеличивает погрешность отслеживания. Это компромисс, и мы хотели, чтобы он научился с ним справляться».
В результате обучения с подкреплением робот освоил принципы правильного позиционирования на площадке. Он пришёл к выводу, что после удачного удара наилучшая стратегия — возврат в центр площадки к задней линии. ANYmal научился самостоятельно вставать на задние «лапы», чтобы лучше видеть приближающийся волан, понял, как избегать падений и оценивать разумность риска с учётом своей ограниченной скорости. Он также воздерживался от попыток, заведомо обречённых на неудачу, тем самым снижая вероятность повреждений.

Результаты реальных матчей с людьми показали, что ANYmal как бадминтонист пока что не более чем любитель. Его время реакции составляло около 0,35 секунды, в то время как средний человек реагирует за 0,2–0,25 секунды, а элитные игроки с натренированными рефлексами и развитой мышечной памятью сокращают это время до 0,12–0,15 секунды. Ещё одной проблемой является ограниченное поле зрения камеры робота.
Учёные планируют продолжать развитие навыков ANYmal. В частности, они намерены сократить время реакции путём предсказания траектории волана на основе позы соперника перед ударом. Также предполагается оснастить робота более продвинутыми камерами со сверхнизкой задержкой. Модернизации потребуют и приводы манипуляторов.
Сам по себе робот, играющий в бадминтон, — скорее курьёз, чем практическое устройство. Однако опыт, полученный в процессе разработки, может быть масштабирован для самых разных задач. «Я думаю, что предлагаемая нами архитектура обучения будет полезна в любом приложении, где необходимо балансировать между восприятием и управлением — например, при подъёме предметов, а также их ловле и броске», — заключил Ма.
Источник:





