







 MWC 2018
MWC 2018 2018
2018 Computex
ComputexРазработчики из Лондонского университета королевы Марии (Queen Mary University of London) представили мягкий тактильный сенсор, который позволяет роботам фактически видеть прикосновение: давление и деформация внутренней поверхности мягкой оконечности датчика сразу превращаются в цветовую картину, считываемую обычной камерой. Так без сложных алгоритмов робот моментально получает исчерпывающую информацию о том, к чему он прикоснулся.






Источник изображения: ИИ-генерация ChatGPT/3DNews
Не секрет, что осязание даётся роботам с трудом. В руке человека свыше 10 тыс. механорецепторов. Наделить робота подобной тактильной чувствительностью пока практически невозможно: либо недостаёт датчиков, либо нужны слишком сложные алгоритмы и вычислительные мощности.
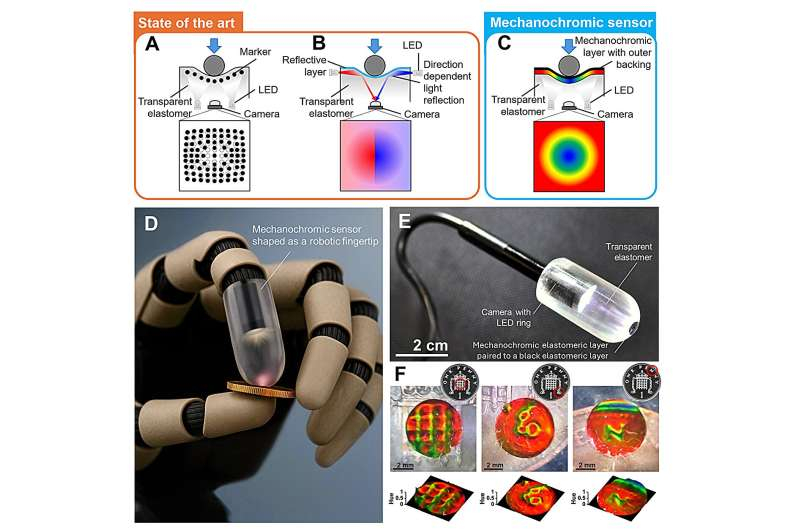
Британские учёные поступили хитро — они предложили прямо считывать деформацию мягкого датчика в месте касания как данные о рельефе поверхности и её механических свойствах. Ключевой элемент устройства — эластичный брэгговский отражатель, заключённый между двумя слоями мягкого силикона.
При нажатии материал деформируется в зависимости от поверхности, к которой его прижимают, и он формирует определённую палитру цветов — пространственно распределённый цветовой узор не за счёт какого-либо красителя, а в силу изменения оптического отклика своей структуры. Эти цветовые узоры несут информацию о контакте, давлении и деформации, поэтому даже простая USB-камера может считывать карту нагрузки напрямую, без плотной сетки датчиков физического касания, сложной архитектуры и запредельных алгоритмов.
Источник изображения: Queen Mary University of London
Предложенное решение позволяет забыть о необходимости компромисса между разрешением и скоростью. Классические тактильные датчики — ёмкостные, резистивные или пьезоэлектрические — работают в реальном времени, но ограничены размером чувствительных ячеек, расстоянием между ними, разводкой и взаимными помехами, что редко выводит их за пределы разрешения менее 1 мм. Тактильные датчики на основе машинного зрения способны видеть более мелкие детали, но требуют серьёзных вычислительных ресурсов. Предложенное британцами решение позволяет различать элементы поверхности с шагом около 100 мкм причём в реальном режиме времени без лишней нагрузки на процессор.
Разработка поможет наделить роботизированные манипуляторы высокой тактильной чувствительностью для производственных, медицинских и бытовых нужд. Такая «кожа» может быть установлена на захваты для сборки микрокомпонентов, когда даже небольшое превышение давления способно повредить деталь. В случае протезов это даст богатую тактильную обратную связь, а в хирургических роботах поможет различать здоровые и повреждённые ткани на ощупь.
Источник:





