







 MWC 2018
MWC 2018 2018
2018 Computex
Computex
⇣ Содержание
|
Опрос
|
реклама
Самое интересное в новостях
Роботы, весна 2005
Первые "бионические комплекты" поступят в продажу уже в этом годуУже с самого начала этого года мы говорим о том, что наука от романтики переходит к серийному производству робототехнических приспособлений. И если ранее повсюду анонсировались опытные образцы, то теперь имеет место их розничная продажа. В частности, речь идет об экзоскелетах, которые позволяют улучшить механику человеческого тела. Робототехническая HAL-система (аббревиатура от Hybrid Assistive Limb, переводя дословно, "гибридная вспомогательная конечность") Bionic Suite уже готова к массовому производству и должна поступить в продажу по цене примерно $19000. Разработка Bionic Suite велась в течение 10 лет. Структурно ее можно описать следующим образом - на человека одевается экзоскелет с биоэлектрическими сенсорами, сенсорами гравитации, силовыми приводами, батареей питания и компьютером с возможностью беспроводной связи. И хотя все это весит достаточно много, человек не ощущает никакой нагрузки, поскольку она распределяется только в рамках экзоскелета. HAL-система может "увеличить" мышечную силу рук и ног, например, позволит поднимать тяжести выше 40 кг, при этом для человека такая нагрузка окажется незаметной. Одними из самых важных элементов подобных конструкций являются биоэлектрические датчики, которые считывают импульсы, подаваемые от мозга к мышцам. Данные от этих сенсоров поступает в компьютер, где преобразуются в команды для силовых приводов экзоскелета.  На данный момент имеет смысл говорить о появлении серийных экзоскелетов The Raw Feed для ног. В самом ближайшем будущем можно ожидать появления более полноценного комплекта. HAL-экзоскелеты Bionic Suite в шутку называют костюмами супермена. И это похоже на действительность. Несколько слов о развитии ситуацииСама идея выпуска экзоскелетов не нова и уже не раз обсуждалась в рамках применения в военных и космических целях. Но если анализировать ситуацию более конкретно, то развитие данного направления может столкнуться с некоторыми трудностями - стоит ли создавать экзоскелеты, когда можно без труда сделать специализированные управляемые человеком машины? Например, для поднятия тяжестей может вполне подойти обыкновенный автопогрузчик, производство которого не требует серьезных затрат и применения сверхвысоких технологий. Вместе с тем, активизируя внимание на экзоскелетах, мы подразумеваем возможность более точного выполнения операций, работу на неровных поверхностях, "умную" транспортировку грузов. Что нас ожидает в ближайшем будущем? Современные модели будут, пожалуй, анализировать команды мозга для небольшой группы мышц, таких как, например, бицепсов, трицепсов, дельтавидных, бедра и голени - то есть рук и ног. О появлении экзоскелета с биоэлектрикой мышц спины и позвоночника пока речи не идет. Я не имею в виду вариант, когда позвоночник поворачивается на 20 градусов, а экзоскелет на 360 :). Дело в том, что сами экзоскелеты представляют из себя тяжелые конструкции, и человек вряд ли сможет их поворачивать самостоятельно. Другой момент заключается в специфике биоэлектрических датчиков, считывающих информацию не напрямую с мозга, а с мышц. Именно эта идея и позволяет сейчас говорить о появлении первых экзоскелетов. Передовые роботы от WASEDAТо, что японский университет Waseda University попал в историю антропоморфных роботов - неопровержимый факт. Нужно отметить, что само слово "Waseda" - уже брэнд. Глядя на современных Honda ASIMO, Fujitsu HOAP-2 или Sony SDR-4X невольно вспоминаешь фотографии начала 70-х, на которых был изображен громоздкий "железный" гуманоид WABOT-1 с кучей проводов. Удивительно, что в самом начале транзисторной эры, когда производственные процессы были далеки от совершенства, профессор Иширо Като (Ichiro Kato) в рамках данного университета создал лабораторию, которая смогла выпускать функционирующие модели. При этом стоит отметить, что многие из выбранных тогда направлений оказались предопределяющими. Например, в середине 80-х в роботов была внедрена поддержка стандарта MIDI, благодаря чему роботы могли самостоятельно музицировать. Если смотреть на хронологию событий, то стандарт MIDI потом использовался не только как чисто музыкальный, но и как один из вариантов командной системы управления. В конце 90-х нередко можно было встретить модели, которые управлялись с помощью MIDI-сообщений. Возвращаясь к Waseda University, скажем, что вы можете ознакомиться с историей японских роботов-гуманоидов, посетив сайт Humanoid Robotics Institute, где можно найти видеофайлы, буклеты, книги, посвященные данной теме.  Американцы, например, пошли по совершенно иному пути, поставив перед собой задачу создания армии роботов. Их не столько интересовали человекоподобные механизмы, сколько вооруженные до зубов вездеходы. Если говорить о современных разработках, то японцы больше акцентируют внимание на привлекательных роботах-гидах, роботах-сиделках, роботах-актерах. В США "очеловечивание" роботов происходит другим образом - американцы называют именами пылесосы-шайбы Roomba, или устраивают гонки R2-D2 (персонаж "Звездных войн") самостоятельной сборки. В данном материале мы расскажем о роботах-флейтистах (Anthropomorphic Flutist Robot) серии WF, говорящих роботах WT, разрабатываемых в рамках подразделения Waseda University - лаборатории Takanishi. История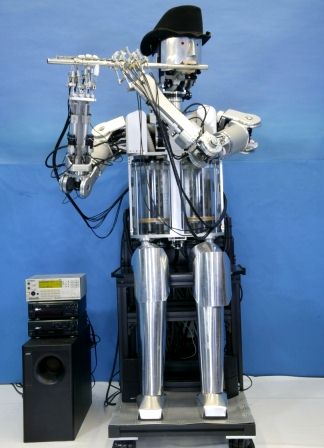 Разработка серии WF началась в 1990 году. За основу была взята идея механического повторения движений музыканта-флейтиста. Основное внимание было сфокусировано на создании механической эмуляции легких, горла, языка, губ, рук и пальцев. Первая модель WF-1 была не очень похожа на человека - на специальной подставке-раме была размещена система из цилиндров и трубок, эмулирующая легкие, горло и губы. В 1992 году была продемонстрирована существенно доработанная модель WF-2, у которой появились руки и пальцы, правда еще в неявном их виде. Именно с этой модели проявились очертания реализации придуманной идеи - вся система в целом интегрирована с MIDI, и позволяет преобразовывать MIDI-сообщения в команды для всех эмулируемых механических элементов. Но задача была не из легких, поскольку изобретатели из лаборатории Takanishi хотели создать профессионального музыканта, играющего с учетом всех нюансов звукоизвлечения. Поэтому для серии WF- наступило долгое время испытаний и доработок. В 1998 году появляется модель WF-3RIV, внешне похожая на кучу металлолома, а в 2002 она приобрела определенные очертания в виде WF-3RIX. Для усиления визуального эффекта разработчики сделали достаточно страшное пластиковое лицо (понятно, что не художники они) и сверху на WF-3RIX нахлобучили черный котелок. По внешнему виду WF-3RIX остался смешной этажеркой. 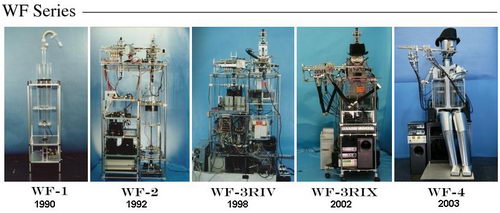 По существу, данная версия третьей модели могла использоваться как "живой" MIDI-инструмент. Все управление производилось с помощью двух компьютеров - первый (секвенсор) отвечал за аккомпанемент, генерацию темпа и тона, второй - за управление непосредственно роботом. Синхронизация между ними происходила по протоколу MTC (MIDI Time Clock). В качестве дополнительного элемента управления была разработана специальная педаль, с помощью которой можно запускать систему на воспроизведение и обозначать темп. Данное решение было специально создано для обеспечения совместного выступления WF-3RIX и человека-музыканта. 2003 и 2004 годы разработчики посвятили созданию новой модели WF-4. Одна из основных целей, которая преследовалась изобретателями - создание интерактивной модели "человек-робот". На живого музыканта надевались специальные датчики, считывающие информацию о движении рук, дыхании, педаль заменили на специальное чувствительное покрытие пола, а музыкальную информацию получали путем записи через микрофон. Внешне WF-4 также изменился - страшное пластиковое лицо было заменено на глупое металлическое, появились несуществующие ноги (муляж). Вместо подставки под инструмент были реализованы статические механические руки-держатели. Таким образом, набор металлолома превратился в гуманоидоподобное существо. Среди других усовершенствований можно отметить новый вариант механизма губ, позволяющий более стабильно управлять воздушным потоком. Если Вы заметили ошибку — выделите ее мышью и нажмите CTRL+ENTER.
Материалы по теме
|
© 1997—2026 Электронное периодическое издание "3ДНьюс" | Свидетельство о регистрации СМИ Эл ФС 77-22224
выдано Федеральной Службой по надзору за соблюдением законодательства в сфере массовых коммуникаций и охране культурного наследия
При цитировании документа ссылка на сайт с указанием автора обязательна. Полное заимствование документа является
нарушением
российского и международного законодательства и возможно только с согласия редакции 3DNews.





