







 MWC 2018
MWC 2018 2018
2018 Computex
Computex
⇣ Содержание
|
Опрос
|
реклама
Самое интересное в новостях
Терминатор - 4
Робототехнический и кибернетический бум в конце прошлого столетия полностью изменил мышление и мировосприятие человека. Теперь вы вряд ли можете представить жизнь без компьютеров и интернета, конвейерного производства и электронного документооборота. В будущем мы не сможем обойтись и без автономных роботов. Сейчас уже появляются проекты роботов-солдат, беспилотных самолетов, самоуправляющимися такси и так далее. К чему это все приведет? Вот вопрос из вопросов, над которым задумываются все чаще и чаще. Давайте посмотрим на расстановку позиций сегодня. Машинный метаболизмМы уже затрагивали данную тему ранее, но сейчас имеет смысл повторить пройденное. Метаболизм или, проще говоря, обмен веществ, присущ всем живым организмам, населяющим нашу планету. И если мы испытываем чувства голода или усталости, это подразумевает определенную реакцию мозга на определенные события происходящие в организме. Машинный метаболизм стал изучаться сравнительно недавно - в момент, когда электроника и кибернетика достигли нужного пика. Основной задачей исследователей в этой отрасли стало изучение способностей машины к самостоятельному принятию решений. Самый простой пример - у робота начинает кончаться питание, информация с датчика поступает в центр управления, и механизм самостоятельно едет к подзарядному устройству, при этом узнавая с помощью радиосвязи месторасположение последнего. Мы получаем простейшую замкнутую систему. Это сравнимо с человеческим чувством голода. Другой пример - при выполнении определенных операций некоторые составные элементы робота начинают перегреваться. Данные с термодатчиков поступают в командный центр, и тот дает команду на временную остановку. Этот вариант сравним с нашим чувством усталости. Таким образом, мы получаем механическое повторение человеческих свойств. Структурно его можно разделить на три части: систему считывания данных, блок анализа и управления, систему приведения команд в исполнение. Но, при этом, существует и значительная разница. В качестве командного центра может использоваться и микрокомпьютер внутри устройства, и внешний сервер, который может управлять сразу большим множеством механизмов различного типа. При этом возможен и смешанный (гибридный) вариант. При этом в отличие от человека робот может иметь иерархическую модель управления. Например, на борту у него встроена система навигации, внешний компьютер по радиосвязи отслеживает все данные и связывается в случае необходимости с человеком, который, в свою очередь, дает команду более верхнего уровня. Трехуровневая система управления, которая, в принципе, и прививается сейчас, является одним из самых оптимальных решений. Роботы-военныеВоенная индустрия всегда шла впереди. На данный момент это утверждение не является исключением. Defense Advanced Research Projects Agency (DARPA) является основным исследовательским центром Министерства Обороны США (Department of Defense (DoD)). На сегодня в рамках этой организации проводится очень амбициозная программа - создание армии роботов. Планы Future Combat Systems (FCS) достаточно ярко иллюстрирует следующий график: 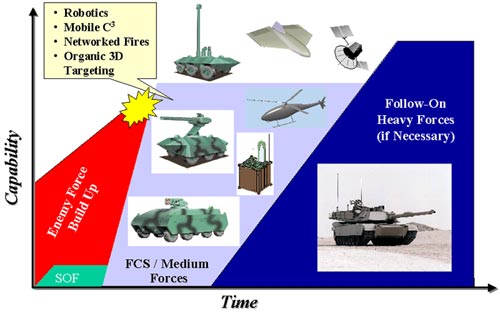 Из него мы можем увидеть, что проект FCS рассчитывается как следующее слово в военной индустрии. Благодаря внедрению роботов, из военных действий исключается самый важный фактор - присутствие на поле боя живых солдат. Соответственно, FCS превращает военные действия в стратегическую игру, сравнимую со Starcraft или MechWarrior. Благодаря спутниковой связи, управление такой армией можно вести из любой точки мира. Мы имеем в наличии беспилотные самолеты, легкое и среднее наземное вооружение. В ближайшем будущем будет предусмотрен и вариант с тяжелой бронетехникой нового поколения. Во время военных действий в Афганистане состоялась премьера использования боевых роботов, а именно, беспилотного бамбардировщика Predator и дозорных-разведчиков Hermes. По оценкам специалистов подготовка робото-армии, состоящей из воздушных сил и пехоты будет завершена в течение ближайших 10 лет. Переход к полноценной робототехнической армии должен состояться к 2025 году. А к 2015 году DARPA планирует сделать одну треть транспортных средств, состоящих на вооружении США, беспилотными. История терминаторов…Исследовательский центр SPAWAR (Space and Naval Warfare Systems Command), начиная с 1980 года занимается разработкой роботов-солдат. То есть, сама идея великого "Терминатора" не была такой футуристичной, как это могло казаться в то время. За истекший период было создано три модели Roboart I, Roboart II и Roboart III. О появлении первого реального "Терминатора" можно было уже сказать в середине 80-х. Разработка последней модели Roboart III началась еще в 1992 году, и, судя по материалам сайта, еще не закончена. Хотя доля вероятности того, что эта модель уже находится в серийном производстве в более продвинутом виде достаточно велика. Поскольку роботы-солдаты необходимы для охраны военных объектов, проведения незначительных операций и т.п. Основная их отличительная особенность - мобильность. 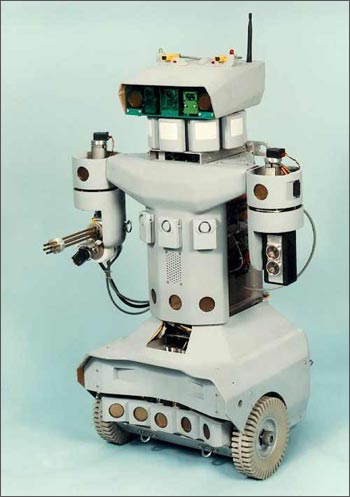 Вот так выглядит "Терминатор" Roboart-III.  Roboart-III имеет на борту сложную системы сенсоров, камер для отслеживания движущихся объектов. В отличие от современных роботов-секъюрити, он еще и вооружен пневматическим оружием. Возвращаясь к предисловию можно сказать, что Roboart III может анализировать входящие данные и вырабатывать решения. Хотя судя по иллюстрации, данный робот передвигается на колесах, что его характеризует не с очень хорошей точки зрения - плохая характеристика проходимости и преодоления препятствий. Например, Roboart III не сможет передвигаться по крутым лестницам либо по сильно неровным поверхностям. Лучший вариант, конечно, - это шагающие роботы, но они имеют другой недостаток - низкую скорость передвижения.  В 2001 году руководитель компании RoboTrix Джордж Осгуд (George Osgood) заявил о выпуске сразу двух моделей роботов-солдат - Gladiator и Spike. На фотографии показан Spike, и как мы видим, он на гусеничном ходу, что увеличивает характеристику проходимости. Кстати, подобные решения уже пробуются в полицейской работе, для захвата преступников и проведения переговоров.  Gladiator является более тяжелым вооружением, на его борту установлен пулемет 7,62-калибра. Данная модель уже реально исследуется на учениях.  Что интересно…Американцы поступают очень красиво, популяризируя технический прогресс как национальную идею. Самые популярные шоу последнего десятилетия - это соревнования роботов. Самые популярные фильмы - фантастика. Самые популярные игры - военные. Делая клич "Алло, мы ищем таланты", и, проводя национальные соревнования, военные выжимают весь творческий и технический потенциал нации. Мы уже не раз писали о боях роботов BattleBots, но это были радиоуправляемые модели. Впервые об автономных механизмах мы заговорили в 2000 году, и как результат - два соревнования 6th International AUV Competition-2003 (подводные роботы) и гонка века DARPA Grand Challenge-2004 (наземные). 6th International AUV Competition Практически из подручных средств, чуть ли не собственном гараже, команды из ведущих университетов занималась созданием автономных подводных роботов. Задачей соревнования было создание непилотируемых подводных машин, способных самостоятельно анализировать и обрабатывать данные. Им нужно было находить под водой объекты и поражать цели самостоятельно. Управление человеком исключалось по правилам. На борту у таких роботов было по два компьютера (один отвечал за считывание данных, второй - за управление), система двигателей, сенсоры, эхо-локаторы, видеокамеры и т.п. В результате мы можем сказать, что мировая премьера в области беспилотной подводной техники состоялась. Событие прошло на военном объекте U.S. Navy's SPAWAR Systems Center (Сан-Диего, Калифорния), что также говорит о заинтересованности армии в подобных решениях. Соревнования 2003 года показали, что реализация беспилотных подводных машин реальна. В 2004 году вес моделей будет уменьшен более чем в два раза (35 кг вместо 100). Таким образом, мы говорим об усовершенствовании полученных результатов. Гонки века - DARPA Grand Challenge Призовой фонд - 1 миллион долларов! Чтобы его получить, нужно создать транспортное средство, которое за десять часов преодолеет расстояние от Лос-Анжелеса до Лас-Вегаса, равное 500 км, 400 из которых - бездорожье. При допуске механизма к соревнованиям не предъявляется много требований, но есть главное - транспортное средство не должно управляться живыми организмами. До этого, конечно, до управления не допускался человек, но мы ведь знаем из новостных лент, что теперь могут животные "в лабораториях NASA":))). Поэтому вступило в силу вот такое ограничение. Как можно посчитать, средняя скорость передвижения будет составлять около 50 км в час. При этом роботу нельзя сбивать или уничтожать препятствия. Их необходимо объезжать. В остальном все стандартно - почти как в фильме "Крысиныые бега" или "Большая прогулка". В октябре 2003 года состоялась аккредитация команд-участников, число которых перевалило за сотню. При этом, многими командами назывались затратные бюджеты от $100.000. Есть и альтруисты, которые собираются потратить на разработку по несколько миллионов долларов. У данного альтруизма есть и подоплека. DARPA заинтересована в разработках касающихся данной области. И вполне возможно, что победителю светит многомиллионный военный контракт. А это уже далеко не призовой фонд. Гонка должна состояться 13 марта 2004 года. Новинки автомобилестроенияОдна из самых роботизированных отраслей - это автомобилестроение. В 2000 году компанией VolksWagen был впервые показан робот-водитель Клаус.  Данная конструкция предусматривает три ноги (по количеству педалей), три руки. Помимо этого на борту Клауса установлено три лазерных сканера, стереокамера, спутниковая навигационная система, радар и т.п. Управление производится за счет компьютера. В роботе предусмотрены алгоритм предотвращения столкновений и система электронного торможения. Разработчики не предусматривают будущего Клауса как водителя, но вместе с тем, на его базе производится отладка механизмов, которые будут встроены в будущие модели от VW. В японской лаборатории NTSEL (Natonal Traffic Safety and Environment Laboratory) - также проводятся эксперименты, результатом которых явился Vehicle Driving Robot. Исследователи не дают много информации по его характеристикам, при этом не было упоминания о его демонстрации на каких-либо выставках. Но в небольшом обзоре по данному устройству сказано, что Driving Robot может выступать в роли тестирующего водителя.  Например, когда вы приобретаете автомобиль, то приглашаете специалиста, чтобы он посмотрел, как звучит двигатель, как идет машина и т.п. И потом он высказывает свое мнение, на которое вы ориентируетесь впоследствии. Driving Robot может более точно оттестировать автомобиль, передавая все полученные данные по различным узлам автомобиля в компьютер. Нужно отметить, что это очень полезное изобретение для автомобильной промышленности. Хотя данная функция, наверняка, предусматривалась как способность робота адаптироваться под различные автомобили. Университеты Огайо, Калифорнии и Аризоны заняты разработкой идеи реализации самоуправляемой машины. В ней нет робота в нашем обычном представлении, поскольку все его узлы распределены по различным узлам машины. Управление производится с помощью компьютера, который получает необходимые данные с различных сканеров и датчиков, а также имеет встроенную карту местности. В принципе, все подобные разработки похожи. Например:  Разработка Университета Аризоны.  Разработка университета Огайо. Очень примечателен в этих изобретениях один момент - они сделаны на базе реально существующих автомобилей. Например, модель от Аризонского университета, именуемая VISTA, создана на базе Chevrolet Celebrity 1989. А вот так выглядит джип Wrangler Spot калифорнийской доработки:  Таким образом, на основе вышеперечисленных примеров, можно сказать о том, что вся современная техника потомственна, и новые варианты управления, которые мы имеем пока только на уровне разработки - это следующий этап развития окружающей нас техники в целом. При этом сейчас разрабатываются варианты автоматизированного управления всего транспорта, включая поезда, грузовые автомобили и т.п. Что касается космоса…Космические автономные роботы сегодняшнего дня позволяют производить передвижения по поверхностям небесных тел либо в космическом пространстве, делать фото и видео-съемку, химический анализ материалов и сред, связываться с командным центром. В будущем планируется создание роботов строителей. И пока не ясно будут ли это обыкновенные роботы или нано-технологии. В любом случае и то, и другое - пока фантастика. А разберемся ли мы на Земле?Очевидно, что роботизированная армия - это неизбежность. Только она хранит в себе и определенную долю опасности. Как я уже говорил в своих прошлых материалах, мы наделяем роботов супервидением, суперслухом и суперчувствительностью. Закладывая алгоритмы анализа данных и выработки решений мы даем нашим железным помощникам толику примитивного разума. Параллельно с этим сейчас идут опыты с повторением человеческого мозга в электронном виде. В середине сентября 2003 года прошла новость о том, что американская компания Artificial Development закончила работу над первым функциональным блоком крупнейшей нейронной сети в мире, именуемой CСortex. Помимо этого мы имеем подобные новости из Хельсинского университета и компании Mitsubishi. Изучением возможности создания нейронных моделей человеческого мозга также длительное время занимались и в рамках SPAWAR в период 1987 - 1996 гг.  Искусственный интеллект в варианте компании Artificial Development - это суперкомпьютер состоящий из пятисот ячеек, в качестве каждой из которых используются двухпроцессорные функциональные блоки. Общая перативная память измеряется 1,5 терабайтами, а физическая равна 80 Тб. Суперкомпьютер позволяет эмулировать 20 миллиардов нейронов человеческого мозга.  И вот в чем парадокс, создавая для роботов зрение, мы сделали суперзрение в диапазонах которые нам не подвластны, слух - суперслух, чувствительность - суперчувствительность, мозг - %-) Вот, в принципе и все, о чем я хотел сказать в этой статье. Дополнительные материалы
Если Вы заметили ошибку — выделите ее мышью и нажмите CTRL+ENTER.
Материалы по теме
|
© 1997—2026 Электронное периодическое издание "3ДНьюс" | Свидетельство о регистрации СМИ Эл ФС 77-22224
выдано Федеральной Службой по надзору за соблюдением законодательства в сфере массовых коммуникаций и охране культурного наследия
При цитировании документа ссылка на сайт с указанием автора обязательна. Полное заимствование документа является
нарушением
российского и международного законодательства и возможно только с согласия редакции 3DNews.





