|
Опрос
|
реклама
Быстрый переход
КАМАЗ рассказал, когда на дороги выйдут грузовики без водителей — ждать осталось недолго
23.07.2026 [18:37],
Павел Котов
В 2028 году КАМАЗ намеревается начать эксплуатацию грузовых автомобилей в полностью беспилотном режиме, сообщает ТАСС со ссылкой на заявление Сергея Назаренко, главного конструктора инновационных автомобилей на предприятии. 
Источник изображения: kamaz.ru «Работа идёт, и мы движемся к тому моменту, когда сможем уверенно говорить о том, что машина отрабатывает весь маршрут, в 99,99% случаях, без необходимости вмешательства. Мы ставим себе целью в 2028 году начать заезды таких машин без водителей в кабине», — заявил господин Назаренко. Сейчас при движении машин на автопилоте за ними следит оператор-логист, который при необходимости имеет возможность смешаться в работу систем, в том числе перевести на себя управление автомобилем, ориентируясь по видеокамерам. «Такое вмешательство носит эпизодический характер и допускается лишь для разрешения отдельных сложных ситуаций: например, для выезда из затора или объезда препятствия, которое автономная система не может корректно обработать», — пояснил конструктор. Грузовые машины КАМАЗ с автопилотом ранее проходили испытания на трассах общего пользования. В 2023 году по трассе М-11 «Нева» между Москвой и Санкт-Петербургом начали ходить три магистральных тягача с автономными системами управления. В 2025 году беспилотные машины КАМАЗ испытывались на центральной кольцевой автодороге (ЦКАД) в Помосковье. Tesla поставила рекорд по числу ДТП с участием автопилота FSD — 207 за месяц
23.07.2026 [11:53],
Алексей Разин
Компания Tesla хоть и старается максимально скрывать подробности о дорожных инцидентах с участием своей технологии активной помощи водителю FSD, вынуждена регулярно подавать отчёты на эту тему американскому ведомству NHTSA. Свежий отчёт гласит, что количество происшествий неуклонно растёт, в позапрошлом месяце оно достигло рекордных 207 штук. 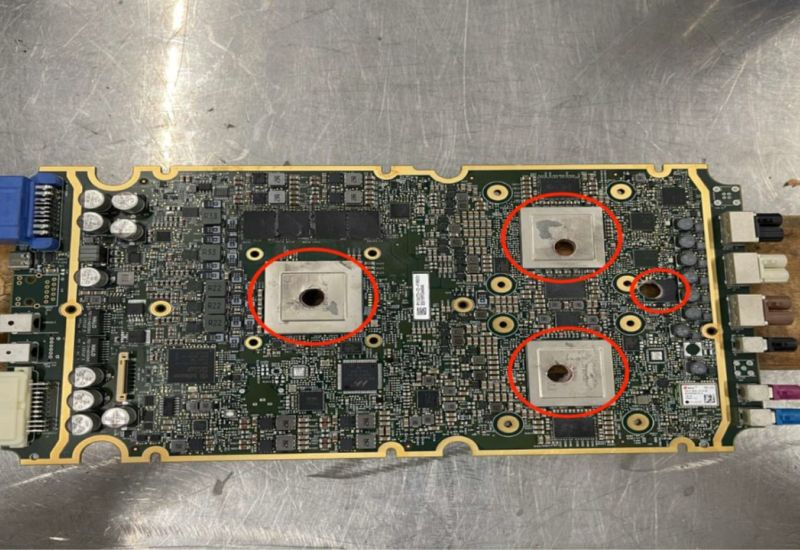
Источник изображения: Tesla Примечательно, что за весь 2021 год количество ДТП с участием электромобилей Tesla под управлением FSD не превысило 157 штук, а теперь показатель в 207 инцидентов достигается всего за один месяц. Накопленным итогом Tesla отвечает за 3763 происшествия на территории США, которые произошли в режиме автоматического управления транспортными средствами. Это около 85 % статистики всех компаний, чьи беспилотные технологии используются на территории страны. Если за весь прошлый год количество ДТП с участием FSD достигло 1043 штук, то только за первую половину текущего года было зарегистрировано 826 инцидентов. Формально, в годовом сравнении статистика происшествий увеличилась с начала текущего года на 73 %. Подобная динамика, по большому счёту, неизбежна с учётом расширения эксплуатируемого парка электромобилей Tesla с комплексом FSD. Кроме того, эти машины в совокупности проезжают больше в пределах отчётного периода, чем это наблюдалось ранее, а потому закономерно растёт вероятность ошибок в работе автоматики. В прошлом квартале, например, как следует из свежего отчёта Tesla, количество оформленных подписок на FSD соответствовало 55 % продаж новых машин этой марки. Только в четырёх странах Европы, где FSD уже одобрена к использованию, пройденное клиентами с активностью этого режима расстояние превысило 50 млн километров только с начала июля. В своей отчётности для NHTSA компания продолжает тщательно скрывать подробности о происшествиях. Как добавляет Electrek, на недавней квартальной конференции Tesla генерального директора Илона Маска (Elon Musk) спросили о выработке решения для владельцев электромобилей, которые оснащены оборудованием для FSD третьего поколения (HW3), но хотели бы достичь полной автономности управления. Глава компании был вынужден признать, что пока никаких решений для этой проблемы не выработано. Напомним, с 2016 года Илон Маск настаивал, что возможностей аппаратного обеспечения всех выпускаемых с того момента электромобилей Tesla должно хватить, чтобы после обновления ПО в будущем научиться обходиться без водителя во время движения. Маск только признался, что по-хорошему, надо бы обновить все бортовые компьютеры электромобилей Tesla с оборудованием ниже поколения HW4, но подобные мероприятия обошлись бы компании в крупную сумму. Замене на более совершенное оборудование подлежали бы около 4 млн электромобилей. Пока же с учётом эксплуатации разномастного по возможностям «железа» автопарка, компания вынуждена для более возрастных модификаций выпускать усечённые по своим возможностям версии программного обеспечения. При этом Маск дал понять, что и уровня HW4 недостаточно для реализации полноценной автономности управления. Вместо этого он сослался на более совершенный бортовой компьютер, который в производство будет запущен в середине следующего года и превзойдёт по некоторым критериям тот самый HW4. Либо, как добавил Маск, можно сразу же перейти на чип AI5, который должен выйти на этап массового производства к концу следующего года. Первые партии чипов AI5, как пояснил Маск, будут направляться для использования роботами Optimus. Другими словами, возрастные электромобили Tesla если и получат апгрейд бортового компьютера, то не в первую очередь, и не в этом году. Tesla похвасталась расширением сервиса роботакси, но его рост почти остановился
23.07.2026 [10:18],
Алексей Разин
Как и предполагалось, на квартальной отчётной конференции руководство Tesla не забыло упомянуть, что воспользоваться фирменными роботакси теперь можно ещё в двух городах штата Флорида, помимо Майами. При этом приведённый компанией график роста количества оплачиваемых поездок таил подвох — по его данным получалось, что темпы роста во втором квартале текущего года приблизились к нулю. 
Источник изображений: Tesla Формально, как поясняет Electrek, в первом квартале сервис прибавил 900 000 миль оплачиваемых поездок, и во втором квартале ситуация повторилась, но именно это говорит о замедлении темпов экспансии услуги. Например, в третьем квартале прошлого года объём оплачиваемых перевозок увеличился на 150 000 миль, в четвёртом — сразу на 450 000 миль, а в первом полугодии темпы роста фактически вышли на плато, хотя само по себе количество оплачиваемых поездок продолжило увеличиваться. В любом случае выход на плато лучше падения. 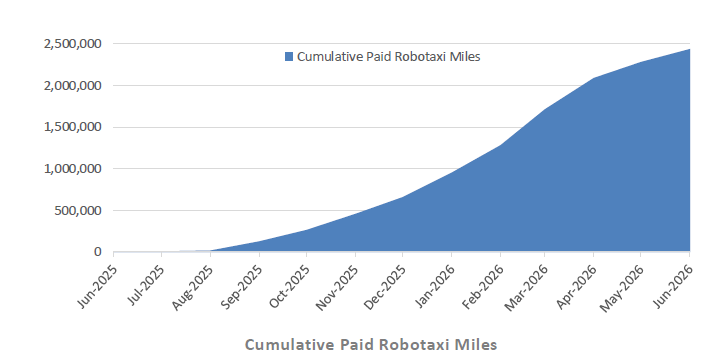 Внутри квартала динамика выглядит ещё более неравномерной. Если в апреле сервис прибавил сразу 500 000 миль, то в мае и июне — лишь примерно по 200 000 миль в каждом случае. По сути, в начале второго квартала Tesla наращивала объёмы оказания услуг роботакси гораздо активнее, чем в конце периода. Как отмечалось недавно, в избранных городах присутствия фирменные роботакси Tesla работают в составе парка из 21 машины, причём 17 из них эксплуатируются в Остине. В Калифорнии, к тому же, за рулём роботакси Tesla находится страхующий водитель, поскольку его отсутствие компания пока не может согласовать с местными властями. В Техасе роботакси Tesla работают в трёх городах, во Флориде — тоже в трёх, а в столицах Невады и Аризоны они пока только должны появиться. В районе залива Сан-Франциско роботакси Tesla передвигаются с водителями за рулём. В презентации Tesla отмечается, что запуску сервиса в новых городах предшествует инструктаж сотрудников аварийных служб по взаимодействию с электромобилями этой марки. В частности, пожарные должны уметь грамотно тушить электромобили и быстро обесточивать их. Tesla запустила свои роботакси в два города Флориды, но лишь формально
22.07.2026 [13:32],
Алексей Разин
В окрестностях штаб-квартиры Tesla в столице Техаса фирменные роботакси перевозят пассажиров по особым приглашениям уже больше года, но непосредственно размер таксопарка нельзя назвать обширным, а его работу интенсивной. Теперь чисто формально сервис беспилотных такси Tesla начинает работать и в двух городах штата Флорида. 
Источник изображения: Tesla Как отмечает Electrek, об этом стало известно по лаконичному заявлению на официальной странице сервиса в социальной сети X: «Роботакси теперь в Тампе и Орландо». На этой неделе Tesla отчитывается о результатах второго фискального квартала, а потому компании нужны подобные события для упоминания перед инвесторами. При этом компания не стала уточнять, какое количество роботизированных такси выйдет на улицы указанных двух городов во Флориде, хотя и схематично обозначила одобренную для их эксплуатации территорию площадью в несколько кварталов. По всей видимости, в салоне роботакси в Тампе и Орландо будет присутствовать нанятый Tesla наблюдатель, хотя он может и находиться на переднем пассажирском сидении, как это происходит в Техасе. Позже компания удалила страхующего испытателя из салона роботакси, но он продолжил незримо контролировать ситуацию из машины, которая следовала по пятам за таксомотором и требовала присутствия отдельного водителя. То есть, на связку из двух машин всё равно приходилось в общей сложности два водителя, просто они сосредоточились в одной из них. Численность автоматического таксопарка также остаётся не самой любимой темой для обсуждения представителями Tesla. Если в конце апреля по улицам Остина ездило 25 машин, то к июню их количество сократилось до 17 штук. В Далласе набралось ещё четыре таксомотора, но всего по территории Техаса в ограниченном периметре передвигалась только 21 машина. Илон Маск (Elon Musk) подобную медлительность с точки зрения экспансии сервиса объяснял заботой о безопасности. Независимые наблюдатели отмечают, что в Остине роботакси Tesla в среднем в четыре раза чаще попадают в ДТП или ситуации, граничащие с аварийными. На рынке США конкурирующая Waymo имеет все основания считаться лидером, поскольку её парк из 3000 беспилотных такси распределён по нескольким крупным городам, и они еженедельно осуществляют более 500 000 оплачиваемых поездок. Tesla же до сих пор разрешает пользоваться своими роботакси только тщательно отбираемым клиентам. ИИ и автопилот смогут раскрыть потенциал электромобилей, считают в Foxconn
21.07.2026 [12:51],
Алексей Разин
В определённый момент времени перспективными типами продукции начинают интересоваться многие участники рынка. Искусственный интеллект и роботы сейчас на подъёме, а вот спрос на электромобили меняется волнообразно. В компании Foxconn считают, что именно ИИ и технологии автопилота способны в полной мере раскрыть рыночный потенциал электромобилей. 
Источник изображения: Foxconn Для этого тайваньского контрактного производителя электронных устройств Apple и серверных систем Nvidia данный вопрос имеет принципиальное значение, поскольку Foxconn уже не первый год пытается закрепиться в статусе крупного контрактного производителя электромобилей. Правда, удачным портфолио проектов Foxconn пока похвастать не может, поскольку наиболее известные за пределами рынка Тайваня примеры типа Lordstown Motors и Fisker завершились банкротствами обоих потенциальных партнёров. По слухам, теперь Foxconn собирается наладить выпуск электромобилей для кого-то из японских заказчиков, но среди них не будет Nissan. Директор по стратегии электромобильного бизнеса Foxconn Дзюн Сэки (Jun Seki) считает, что ИИ и автопилот могут дать электромобилям то преимущество по сравнению с гибридами, которого они сейчас в явном виде лишены. Сейчас электромобили, по его словам, остаются дорогими и не очень функционально развитыми относительно гибридных машин. Возможность скоростной зарядки могла бы улучшить восприятие электромобилей покупателями, но решающим преимуществом по сравнению с гибридами она сама по себе не станет. Автономное функционирование позволит серьёзным образом изменить рынок транспортных средств, как считает представитель Foxconn. Машины смогут довозить людей до места назначения и возвращаться к месту стоянки, а пожилым людям или инвалидам автономный транспорт позволит свободнее перемещаться. По мнению Дзюна Сэки, характеристики современных электромобилей и их дизайн сейчас фактически очень однородны, производителям сложно как-то выделить свою продукцию на фоне конкурентов при помощи функциональности. По его словам, к 2040 году более 80 % новых транспортных средств будут обладать автопилотом четвёртого или более высокого уровня. Фактически, он будет предусматривать участие человека в управлении только по запросу водителя. Как отмечает Дзюн Сэки, электромобили лучше подходят для внедрения передовых цифровых технологий, чем гибриды, а ещё последние сложно автоматизировать на этапе заправки топливом. Беспилотные автомобили будут реже попадать в ДТП, а износ их деталей будет более равномерным, поскольку автопилот исключает резкие торможения или ускорения. Пока стоимость передовой системы автопилота в пересчёте на один автомобиль может достигать $20 000, как признаётся Сэки, и это ограничивает их распространение на рынке. Примерно лет через пять, как он считает, ИИ в сфере автопилота усовершенствуется настолько, что машинам потребуются менее сложные и дорогие сенсоры, а точные цифровые карты местности будут нужны не так сильно, как сейчас. Системы автопилота станут стандартизированными и более доступными, что и будет способствовать росту популярности электромобилей на фоне альтернатив. Горе от ума: с новыми версиями FSD электромобили Tesla стали чаще нарываться на штрафы
21.07.2026 [12:47],
Алексей Разин
В электромобилях Tesla программное обеспечение определяет большинство функциональных возможностей, но самые интересные из них относятся к технологиям автономного управления. Они непрерывно совершенствуются, но иногда кривая прогресса приводит к ухудшению потребительских качеств машины. Например, в новых версиях FSD автоматика стала менее предсказуемо вести себя с точки зрения соблюдения скоростного режима. 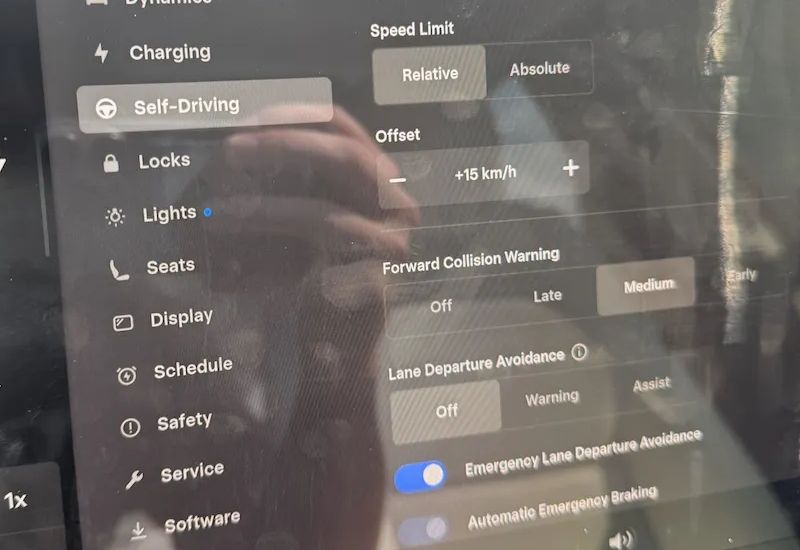
Источник изображений: Electrek Как поясняет редактор Electrek Фред Ламберт (Fred Lambert), проживающий в Канаде, недавно он поплатился за включение FSD на прямом участке загородной дороги необходимостью общения с полицейским патрулём и выплатой штрафа за превышение скорости. По словам автора исходной публикации, в минувшие выходные он демонстрировал двум своим пассажирам возможности комплекса FSD, включив режим автономного управления на загородном участке дороги, на котором предусмотрено ограничение максимальной скорости на уровне 50 км/ч. При этом FSD работал в стандартном режиме, предусматривающем законопослушное, но максимально приближённое к навыкам среднестатистического североамериканского водителя поведение. В один момент автоматика в силу каких-то непонятных причин решила, что на свободном участке дороги в светлое время суток лучше ехать чуть быстрее, и разогнала машину до 78 км/ч. Проезжавший навстречу полицейский патруль зафиксировал это нарушение на бортовую камеру, развернулся и принудил сотрудника редакции Electrek остановиться у обочины для оформления штрафа за превышение скорости на 28 км/ч. Как пояснил сам Ламберт, обычно в Канаде допускается превышение скорости на 10 или 20 км/ч от предписываемого знаком уровня, и местная полиция не привлекает водителей к ответственности, если те едут равномерно и не вызывают подозрения. Тем не менее, 28 км/ч превышения в случае фиксации на камеру не позволяли рассчитывать на снисходительность блюстителей закона, а потому Ламберту пришлось раскошелиться на штраф, хотя машиной в момент правонарушения управлял не он, а бортовая автоматика Tesla. 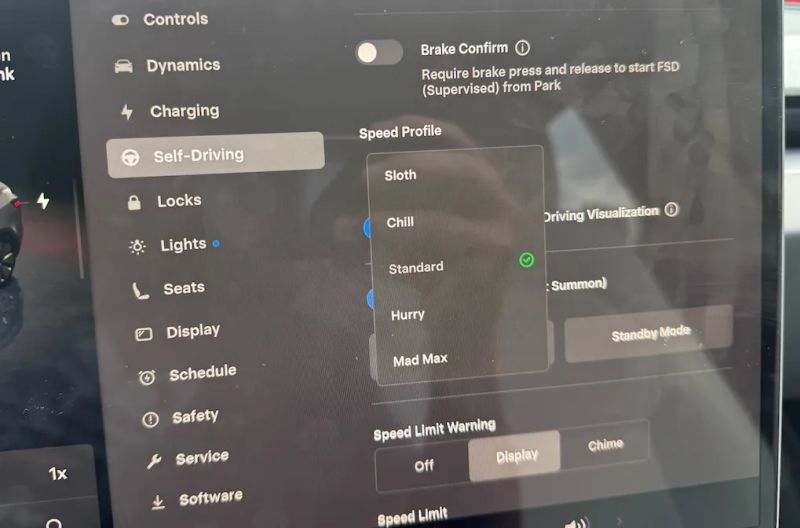 Как поясняет автор публикации, в прежних версиях FSD имелась возможность вручную выставить допустимый предел нарушения скоростного режима (см. первое фото), и машина никогда не пренебрегала этой установкой во время движения в автономном варианте. В новых версиях FSD компания заменила числовые параметры на набор из пяти фиксированных пресетов, которые напрямую не характеризуют способность автоматики превышать максимально разрешённую скорость. Пресловутый «Mad Max» буквально запрограммирован на скоростную езду, но в конкретном случае был выбран «стандартный» режим. Как добавляет Ламберт, в нынешней версии FSD даже не предупреждает водителя о превышении допустимой скорости, что поднимает ещё больше вопросов к полезности реализованных в обновлении изменений. Следствие подтвердило слова Tesla: водитель Model 3 отключил автопилот перед смертельным ДТП
17.07.2026 [08:25],
Алексей Разин
Ещё на ранних этапах расследования ДТП в Техасе, в результате которого погибла находившаяся в своём доме женщина, представители Tesla выражали уверенность, что за несколько секунд до трагедии водитель электромобиля Model 3, который на высокой скорости пробил стену жилища жертвы, своими действиями отключил фирменный автопилот. Следствие в своих предварительных заключениях теперь подтверждает этот вывод. 
Источник изображения: Tesla Как отмечает The Verge, американское ведомство NTSB в своём опубликованном предварительном заключении приходит к выводу о виновности водителя в этом ДТП. Нажав на педаль акселератора до предела на подъезде к перекрёстку, возле которого располагался дом жертвы, он тем самым отключил систему FSD, которая управляла машиной до этого. Резкое ускорение привело к росту скорости электромобиля до 112 км/ч, после чего он пробил стену дома, где находилась 76-летняя Марта Авила (Martha Avila), позже скончавшаяся от полученных травм. В материалах расследования также отмечается, что до находился возле дороги с двухполосным движением и ограничением скорости 48 км/ч, в момент трагедии была ясная погода без осадков, а дорожное покрытие было сухим. ДТП произошло в светлое время суток, поэтому условия видимости были благоприятными. Компания Tesla изначально настаивала на том, что машина потеряла управление именно из-за нажатия водителем на педаль акселератора до предела. Настройки системы FSD подразумевают, что эти действия предпринимаются водителем осознанно — например, для исключения аварийной ситуации, а потому автопилот при резком нажатии на педаль отключается. Сам водитель, скорее всего, просто перепутал педали. Обвиняемый в непреднамеренном убийстве 44-летний Майкл Батлер (Michael Butler) изначально утверждал, что система FSD была активирована незадолго до столкновения его машины с домом. Nvidia и Toyota объявили о расширении сотрудничества в сфере физического ИИ
16.07.2026 [07:37],
Алексей Разин
Крупнейший автопроизводитель в мире — корпорация Toyota Motor, исторически уделяла особое внимание оптимизации производственных процессов, поэтому в условиях развития технологий ИИ не может оставаться в стороне от прогресса. Помощь автогиганту в эффективном применении ИИ должна оказать Nvidia — стороны объявили о расширении сотрудничества в этой сфере. 
Источник изображения: Toyota Motor Прежде всего, Nvidia будет помогать Toyota расширять физическое применение ИИ на экспериментальном полигоне Woven City в префектуре Сидзуока, где автопроизводитель обкатывает свои передовые решения. Система управления дорожным движением на этом полигоне будет основана на компонентах и программном обеспечении Nvidia. Системы активной помощи водителю, применяемые в автомобилях Toyota, также будут построены с участием Nvidia. Кроме того, обширный парк роботов на автосборочных предприятиях корпорации также будет управляться с использованием разработок Nvidia, а также американского стартапа Ready Robotics. Сотрудничество Nvidia и Toyota продолжается с 2017 года. Системы автопилота уровня 2+, которые устанавливаются в машины японской марки, основаны на компонентах Nvidia. Основатель компании Дженсен Хуанг (Jensen Huang) на этой неделе находится в Японии, где общается с действующими и будущими партнёрами Nvidia. Корпорация Toyota будет использовать технологию «цифровых двойников» в виртуальной среде Nvidia Omniverse для оптимизации процесса сборки автомобилей. Робототехнические платформы Nvidia также будут использоваться Toyota в различных сферах деятельности. В прошлом году Toyota договорилась об использовании платформы Nvidia Drive AGX Orin в своих будущих транспортных средствах коммерческого назначения. Tesla подтвердила разработку беспилотного такси для людей на инвалидных колясках
14.07.2026 [12:07],
Алексей Разин
Идея повышения мобильности при помощи новых технологий должна учитывать интересы и тех граждан, которые по состоянию здоровья не могут перемещаться даже пешком, не говоря уже об управлении автомобилями. Представители Tesla недавно признались, что компания разрабатывает беспилотное такси для тех, кто вынужден передвигаться в инвалидном кресле. 
Источник изображения: Cruise, Raymond Rudolph Адаптированные под нужды этой категории пассажиров транспортные средства должны обеспечивать не только удобство посадки и высадки, но и соответствующую компоновку внутреннего пространства. В идеале человек в инвалидном кресле должен попадать в салон машины без посторонней помощи и так же самостоятельно покидать его. Пока трудно сказать, насколько усилия Tesla в этой сфере сосредоточены на обеспечении этих условий, но представители компании не скрывают, что ведут профильные разработки. По информации Wired, старший советник по политике Tesla Индия Хёрдман (India Herdman) в понедельник, выступая перед городским советом Вашингтона, заявила, что компания занимается разработкой специализированного автономного транспортного средства, которое позволит колясочникам самостоятельно передвигаться. «Мы знаем, что перемещение людей с ограниченными возможностями сильно затруднено, но прикованные к инвалидным креслам люди всё равно имеют право свободно передвигаться, поэтому мы активно занимаемся созданием такого продукта в Техасе», — пояснила представительница компании. В какие сроки появится такое транспортное средство, не уточняется, но Илон Маск (Elon Musk) о необходимости его создания говорил ещё прошлой осенью, а в фирменном приложении для вызова беспилотного такси появилась специальная вкладка, которая пока ведёт к сторонним сервисам для перевозки людей с ограниченными возможностями. Данная ниша на американском рынке пассажирских перевозок развита недостаточно. Даже лидирующая в сегменте беспилотных такси компания Waymo признаёт, что пока не нашла подходящего транспортного средства для предоставления подобных услуг. Беспилотные такси сама Waymo не разрабатывает, предпочитая оснащать специализированным оборудованием серийные электромобили и минивэны. Совместить удобство использования таких такси людьми в инвалидных креслах с установкой оборудования для автопилота у компании пока не получается, хотя она и не отказывается от идеи создания подходящих беспилотных такси. В США этот вопрос находится на контроле у властей, которые требуют от операторов рынка такси наличия специальных транспортных средств для инвалидов. General Motors силами своего подразделения Cruise Automation в 2023 году разработала прототипы беспилотных шаттлов Origin, которые технически позволяли людям в инвалидных креслах передвигаться в них без посторонней помощи, но через год финансирование всего бизнеса Cruise было прекращено, и соответствующему транспортному средству не суждено было пойти в серию. Получается, что Tesla остаётся одной из немногих компаний, разрабатывающих удобное для людей в инвалидных креслах беспилотное такси. Власти США потребовали от разработчиков беспилотных автомобилей перестать мешать экстренным службам
09.07.2026 [11:08],
Павел Котов
Компании, которые разрабатывают технологии автопилота для автотранспорта, должны оперативно отреагировать на «явную закономерность»: беспилотные транспортные средства создают помехи для сотрудников правоохранительных органов и других служб экстренного реагирования. Об этом заявил глава Национального управления безопасностью движения (NHTSA) США Джонатан Моррисон (Jonathan Morrison). 
Источник изображения: waymo.com В адресованном отрасли письме он отметил, что ведомство задокументировало многочисленные случаи въезда беспилотных автомобилей на места происшествий, а также другие инциденты, когда эти транспортные средства «блокировали дорогу машинам скорой помощи и пожарных или не распознавали и не реагировали на основные условия, такие как мигающие огни, сигнальные ракеты, дым, огонь и дорожные конусы». «Давайте я внесу ясность: неспособность обнаруживать и адекватно реагировать на такие ситуации представляет собой функциональный изъян», — отметил господин Моррисон. К концу месяца NHTSA запланирует встречи с разработчиками систем автопилота для поиска решений. Управление призвало разработчиков и операторов беспилотных автомобилей заняться решением проблемы. «Беспилотный автомобиль, который не может безопасно взаимодействовать с сотрудниками экстренных служб, представляет опасность для населения», — говорится в письме. Конкретные инциденты в документе не приводятся, и какие именно компании получили письмо, тоже не уточняется. В конце мая в Далласе (шт. Техас) беспилотный автомобиль Waymo частично перекрыл дорогу, по которой пожарные машины ехали к горящему многоквартирному дому. Есть видеозаписи, на которых автомобили Waymo блокируют машину скорой помощи и проезжают по месту происшествия, где работает полиция. 23 января беспилотный автомобиль Waymo сбил девятилетнюю девочку около школы в Санта-Монике (шт. Калифорния) — она перебегала дорогу в сторону школы из-за припарковавшегося во втором ряду внедорожника. Экспансия беспилотных такси ускорилась: машины Waymo начнут работу ещё в четырёх городах США
09.07.2026 [09:27],
Алексей Разин
Лидером рынка услуг по перевозке пассажиров с помощью беспилотных такси в США на сегодняшний момент является компания Waymo, входящая в холдинг Alphabet. Она обходит конкурентов как по численности автоматического таксопарка, так и по географическому охвату. Последний в ближайшее время будет расширен на четыре новых населённых пункта на территории разных американских штатов. 
Источник изображения: Waymo Как отметила Waymo на этой неделе, она запускает беспилотные такси в Сан-Диего (Калифорния), Лас-Вегасе (Невада), Тампе (Флорида) и Денвере (Колорадо). На первых этапах воспользоваться этими услугами смогут только сотрудники самой Waymo, но позже будет открыт доступ и для широкой публики. В данный момент перевозки с помощью роботакси Waymo осуществляются в более чем десяти городах США. Конкурирующая Zoox только собирается предложить свои услуги в столице Техаса и городе Майами, а активность Tesla пока сосредоточена на территории Техаса, хотя она и планирует предложить свои услуги в Майами. По состоянию на май текущего года, таксопарк Waymo насчитывал около 4000 прототипов роботакси, оснащённых системами автопилота пятого и шестого поколений. Стремление разработчиков сделать манеру вождения этих беспилотных такси «более человечной» не раз приводило к претензиям со стороны американских регуляторов. Кроме того, машины Waymo пришлось обучать объезду затопленных участков дороги и более адекватно реагировать на активность публики во время массовых мероприятий. До конца года Waymo рассчитывает вывести свои беспилотные такси на улицы Лондона, где движение левостороннее, а также довести количество еженедельно осуществляемых беспилотных перевозок до 1 млн штук в неделю с учётом всех регионов присутствия. На данный момент прототипы Waymo уже осуществили более 20 млн поездок с пассажирами. Японский разработчик автопилота Turing начал использовать ускорители AMD на фоне финансирования со стороны этой компании
06.07.2026 [06:58],
Алексей Разин
Опыт Nvidia в создании систем для робототехнической отрасли помог ей закрепиться в автомобильной промышленности, когда речь зашла о создании систем активной помощи водителю с постоянно совершенствуемыми возможностями. Успехи конкурирующей AMD в этой сфере до сих пор оставались в тени, но она недавно заявила о себе через сотрудничество с разработчиками из компании Turing. 
Источник изображения: AMD Как поясняет Bloomberg, японский стартап Turing добавил AMD Ventures в перечень своих инвесторов, а заодно заявил о начале использования компонентов AMD в своей инфраструктуре. Исторически Turing полагался на ускорители Nvidia, но теперь он до 10 % своей потребности в обучении ИИ-моделей покрывает силами ускорителей AMD. Помимо диверсификации поставщиков, этот шаг в какой-то мере позволил снизить затраты, по словам представителей Turing. Стартап собирается предложить своё программное обеспечение в потребительском сегменте автомобильного рынка и роботакси в 2028 году. Относительно поздний выход Turing на рынок не станет проблемой с точки зрения конкурентоспособности, как считают представители компании, поскольку на японском рынке новые модели обычно выходят через три или пять лет, и за это время можно добиться существенного прогресса в разработке технологий автопилота. Кроме того, их практическое применение будет постепенным. Turing делает упор на экономически эффективный подход к разработке автопилота, поэтому и привлечение решений AMD стало для компании предсказуемым шагом. Кукую сумму вложила в Turing компания AMD, не уточняется. В прошлом году стартап привлёк $79 млн, его капитализация оценивается в $600 млн. Как поясняет один из основателей стартапа и его генеральный директор Иссэй Ямамото (Issei Yamamoto), для японской экономики экспорт автомобилей является важнейшим источником доходов. Если его потерять, то и экспортировать из страны будет почти нечего. Автономность управления в будущем станет очень важным фактором дифференциации на рынке, поэтому её важно развивать уже сейчас. Turing рассчитывает занять лидирующие позиции в этой сфере на домашнем рынке Японии. Серийные роботакси Tesla Cybercab без руля и педалей начали ездить по дорогам столицы Техаса
02.07.2026 [11:20],
Алексей Разин
Благодаря Илону Маску (Elon Musk) компания Tesla хоть и славится масштабом своих технических амбиций, на практике нередко уступает конкурентам по размаху практической реализации передовых идей. Выпуск беспилотных такси Cybercab без руля и педалей был налажен ещё в прошлом квартале, но только недавно Tesla вывела их на дороги общего пользования США. 
Источник изображения: Tesla Как и в случае с проектом Robotaxi, который был запущен чуть более года назад, речь пока идёт об эксплуатации неопределённого количества машин в техасской столице с неизменным страхующим наблюдателем на правом пассажирском сидении. Напомним, что салон Cybercab предусматривает всего два посадочных места, и с точки зрения управления машиной они абсолютно равнозначны, ибо левое всё равно лишено руля и педалей. По всей видимости, с учётом правосторонней схемы движения в США компания считает важным демонстрировать, что наблюдатель точно не занимает место водителя, даже если в машине нет органов управления, которыми мог бы воспользоваться человек. 
Источник изображения:X, Tesla Tesla распространила на этой неделе видео, которое демонстрирует эксплуатацию первых Cybercab в серийном исполнении на дорогах Остина. Насколько многочисленным будет парк Cybercab в этом городе, не уточняется. При условии наличия представителя компании на одном из двух сидений, второе может занять только один пассажир. Чтобы развернуть полноценную эксплуатацию роботакси в Остине, Tesla придётся не только заручиться разрешением местных властей на осуществление перевозок таким способом, но и изготовить достаточное количество Cybercab. Впрочем, некоторые источники утверждают, что их тираж уже измеряется сотнями штук, и главные препятствия на пути их экспансии носят преимущественно регуляторный характер. Напомним, Cybercab рассматривается Tesla в качестве важного элемента своего стратегического плана развития. Из-за него компания даже отказалась от выпуска более доступного электромобиля за $25 000 с обычными органами управления. Илон Маск убеждён, что беспилотные такси полностью перекроят рынок пассажирских перевозок, и обладание личным транспортом утратит свою актуальность в большинстве регионов с развитой сетью дорог и системами связи. Американский регулятор предложил убрать педаль тормоза из роботакси — так безопаснее
27.06.2026 [17:49],
Павел Котов
Национальное управление безопасностью движения (NHTSA) США предложило разрешить конструкторам роботакси отказываться от педалей тормоза, назвав существующие нормативные требования к принудительным методам остановки беспилотных автомобилей препятствием для инноваций. 
Источник изображения: tesla.com Накануне ведомство опубликовало уведомление о возможном изменении федеральных стандартов безопасности тормозов для легковых автомобилей — из них могут исключить требование о наличии ножных рабочих тормозов или ручных стояночных тормозов для транспортных средств, оснащённых системами автопилота и не оборудованных средствами ручного управления. По версии NHTSA, эти элементы сами по себе могут представлять угрозу безопасности, потому что они позволяют пассажирам намеренно или ненамеренно отключать автопилот. Но даже в отсутствие педалей и ручного тормоза существующие требования к эффективности торможения останутся в силе. «Независимо от способа управления тормозами, тормозные системы должны быть способны безопасно останавливать транспортное средство, как этого уже требует стандарт. Это правило поможет снять ненужные нормативные ограничения и затраты без отрицательного влияния на безопасность транспортных средств», — пояснили в ведомстве. Машины на автопилоте, изначально укомплектованные рулевым колесом и другими ручными органами управления, а также машины с системами помощи водителю, такими как Tesla Autopilot и Ford BlueCruise, по-прежнему должны будут иметь педали тормоза. Некоторые производители и операторы беспилотных такси, в том числе Tesla, Waymo и Amazon, разрабатывают транспортные средства вообще без ручного управления, но действующие Федеральные стандарты безопасности моторных транспортных средств (FMVSS) по-прежнему требуют наличия педали тормоза. «Запуск ручного управления, напрямую отключающего работу системы автопилота, может представлять угрозу безопасности из-за преднамеренного или непреднамеренного ненадлежащего использования пассажирами транспортного средства», — уверены в ведомстве. Все люди в роботакси являются пассажирами, и от них «не следует ожидать выполнения функций водителя, таких как включение стояночного тормоза». Технологии автопилота «всё ещё находятся на стадии развития, и многие потенциальные преимущества ещё не реализованы», отмечают в NHTSA. Ведомство не хочет полностью отключать ручное управление, но оно не собирается заставлять автопроизводителей придерживаться какого-либо единого способа дать пассажирам возможность остановить беспилотный автомобиль. «NHTSA исходит из того, что если эти средства управления удаляются, пассажиры по-прежнему смогут управлять автомобилем с системой помощи водителю, хотя способ, которым пассажир указывает на необходимость остановки автомобиля с системой помощи водителю, вероятно, будет различаться в зависимости от производителя», — пояснили в ведомстве. Tesla обвинила водителя в недавнем громком ДТП с наездом на жилое здание, хотя автопилот была активен
24.06.2026 [14:01],
Алексей Разин
Нередко электромобили Tesla попадают в ДТП, подразумевающие наезд на неподвижные препятствия или даже строения. Их динамические характеристики при этом определяют высокую кинетическую энергию в момент столкновения и могут приводить к печальным последствиям. По данным компании, наезд Tesla Model 3 на дом в Техасе, в результате которого погибла его жительница, был спровоцирован действиями водителя, а не автопилотом. 
Источник изображения: Tesla Компания проводит анализ записей «чёрного ящика» каждого электромобиля, попавшего в аварию, и в случае с техасским происшествием имеет основания утверждать, что управлявший машиной Майкл Батлер (Michael Butler) за секунды до происшествия перехватил управление у автоматической системы FSD, прожав педаль акселератора до упора. При этом он двигался по жилому кварталу на своём электромобиле Tesla Model 3 в техасском городке Кейти. После нажатия водителем педали акселератора скорость машины возросла до 117 км/ч, в результате чего он не справился с управлением и врезался в стену жилого дома у дороги, нанеся его 76-летней жительнице несовместимые с жизнью травмы. По данным Tesla, даже после столкновения со стеной дома водитель продолжал давить на педаль акселератора. Илон Маск (Elon Musk) ещё на начальном этапе расследования отмёл версию с виновностью автоматической системы FSD в столкновении с домом. По его словам, в черте города бортовая автоматика Tesla не допускает превышения разрешённой скорости, а обстоятельства ДТП позволяли говорить о том, что машина двигалась с высокой скоростью. Допрошенный полицейскими 44-летний водитель Tesla Model 3 утверждал, что машина находилась под управлением автоматики. К несчастью, жительница пострадавшего кирпичного дома в момент столкновения находилась в центре комнаты, стену которой и снёс электромобиль. Скорее всего, желавший обуздать автопилот водитель сперва перепутал педали, нажав акселератор вместо тормоза, а затем в состоянии паники не смог корректно оценить ситуацию. Специалисты давно предупреждают, что человек в момент переключения между режимом автопилота и классическим управлением транспортным средством является «слабым звеном» в системе безопасности, поскольку он не так собран и сконцентрирован, как в условиях полного управления машиной. Время реакции заметно увеличивается, поэтому часть экспертов считает полный автопилот более безопасным для окружающих, чем системы более низкого уровня автономности, допускающие переключение на человека. |
© 1997—2026 Электронное периодическое издание "3ДНьюс" | Свидетельство о регистрации СМИ Эл ФС 77-22224
выдано Федеральной Службой по надзору за соблюдением законодательства в сфере массовых коммуникаций и охране культурного наследия
При цитировании документа ссылка на сайт с указанием автора обязательна. Полное заимствование документа является
нарушением
российского и международного законодательства и возможно только с согласия редакции 3DNews.








 MWC 2018
MWC 2018 2018
2018 Computex
Computex