







 MWC 2018
MWC 2018 2018
2018 Computex
ComputexДля передвижения по пересечённой местности двуногие и четвероногие роботы считаются перспективным направлением, но их приходится оснащать комплектами датчиков и создавать для них достаточно сложные алгоритмы для сохранения устойчивости. Учёные Технологического института Джорджии (США) предложили более простой подход — многоногого робота, вообще лишённого сенсоров.
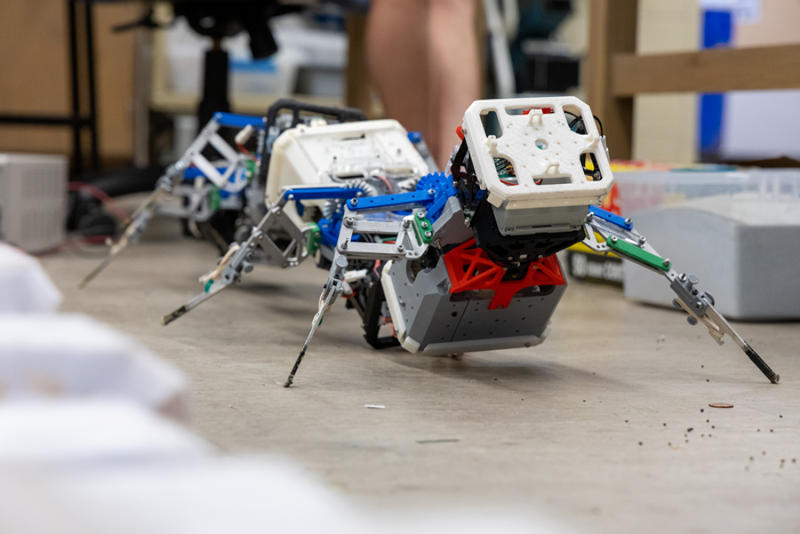
Источник изображения: Georgia Tech
Источником вдохновения для проекта стала математическая теория связи — ещё в 1948 году одноимённую статью опубликовал американский математик Клод Шеннон (Claude Shannon). Он предположил, что для передачи сообщения по каналу связи с шумами это сообщение следует разбить на повторяющиеся фрагменты с избыточной информацией. В случае с роботом такими фрагментами являются его ноги. Аспирант Цзюньтао Хэ (Juntao He) и магистрант Дэниэл Сото (Daniel Soto) первоначально воплотили эту теорию в форме шестиногого робота, которому поручили пробираться по пересечённой местности, имитирующей сложные природные условия.
После каждого испытания они добавляли роботу дополнительные пары ног, пока число ног не достигло шестнадцати. Учёные обнаружили, что по мере роста их количества робот действовал всё лучше, то есть преодолевал препятствия эффективнее. И, что самое важное, при этом не использовались никакие сенсоры или адаптивные программные алгоритмы. Авторы проекта просто исходили из предположения, что если одна или несколько ног споткнутся, движение продолжит множество других.
Экономия на сенсорах и разработке сложных алгоритмах при таком подходе рано или поздно перевешивается затратами на добавление очередной пары ног, поэтому учёным ещё необходимо определить, где проходит эта грань для разных роботов, выполняющих конкретные задачи. Им предстоит найти компромисс с учётом таких критериев как энергия, скорость, мощность и надёжность в сложной системе. На практике технология будет испытываться в сельскохозяйственной отрасли для борьбы с сорняками.
Источник:






 Подписаться
Подписаться