







 MWC 2018
MWC 2018 2018
2018 Computex
ComputexГруппа учёных из Токийского университета использовала искусственно выращенную мышечную ткань в качестве привода для передвижения двуногого робота. Такой привод может превзойти по эффективности иные способы приведения конечностей роботов в движение. К тому же, он будет мягкий на ощупь и сможет легко копировать способы перемещения людей. Иначе говоря, будет приспособлен жить в окружении человека.





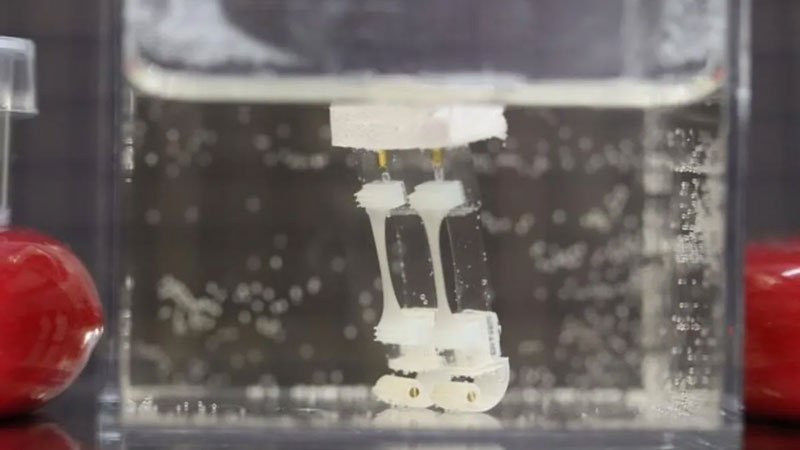
Источник изображения: Shoji Takeuchi research group, University of Tokyo
Экспериментальная конструкция не отличалась сложностью. Мышечная ткань была натянута вдоль гибкой конструкции каждой из пластиковых ног робота. Ноги заканчивались поплавком, и вся конструкция была помещена в сосуд с питательным раствором. Мышечные клетки хоть и искусственные, но живые, поэтому требовали подвода питания.
Сокращение мышц происходило после пропускания тока через жидкость вблизи мышц от одного электрода к другому. Учёные вручную приближали электроды то к одной ноге, то к другой, заставляя их подниматься и совершать шажок вперёд. Отключение тока расслабляло мышцы, и нога совершала движение. Таким образом, были проверены режимы ходьбы по прямой и развороты на месте, когда сокращалась только одна мышца на той или иной ноге.
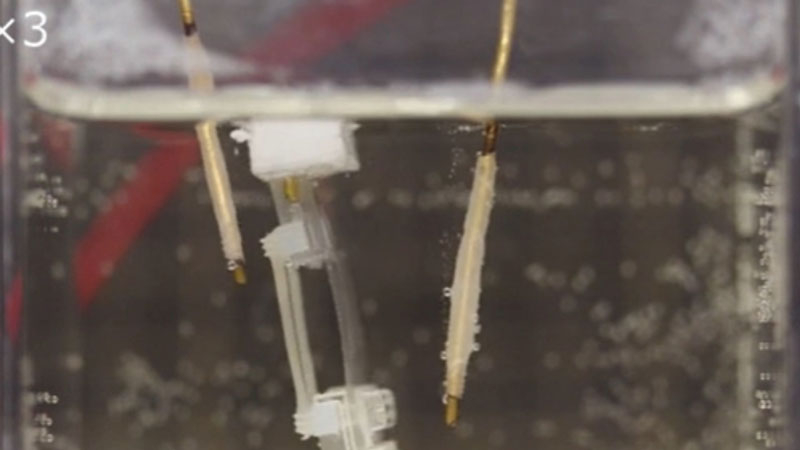
Поднесённые к ноге робота электроды, по которым через жидкость и мышцу пропускается ток
Учёные отметили, что предложенное ими решение работает, и робот с живыми мышцами способен перемещаться и совершать манёвры на местности. В будущем они планируют разработать устройства подвода питания к мышцам, чтобы они могли работать на воздухе, а также эффективные схемы подачи электрических сигналов для управления движением.
Можно не сомневаться, что исследователи найдут удобное решение. Ранее мы рассказывали, например, что японские учёные смогли научить роботов обрастать кожей из живых человеческих клеток, хотя это уже другая история.
Источник:





