
Опрос
|
реклама
Быстрый переход
Представлен прямоходящий модульный робот Tron 2 — «полземлекопа» по-китайски
20.12.2025 [15:01],
Геннадий Детинич
Китайская компания LimX Dynamics представила новую версию фирменных человекоподобных роботов — Tron 2. Роботы LimX отличаются оригинальностью — они выглядят как половина человеческого туловища и в зависимости от задач могут изображать его верхнюю часть — с головой и руками — или нижнюю — с ногами и… вычислительным модулем между ними. Это относительно бюджетный вариант для широкого спектра экспериментов с человекоподобными роботами. 
Источник изображения: LimX Dynamics Компания LimX с самого начала пошла по пути разработки роботов в физически урезанной версии. Её роботизированные платформы предназначены для разработчиков, которые оттачивают свои навыки на физической модели робота. До этого компания выпускала только условно нижнюю часть туловища, тогда как в версии Tron 2 ноги робота можно заменять на руки, превращая его в стационарный манипулятор. Очевидно, «половина землекопа» дешевле, чем целый, но в модульном варианте такой подход ничем не ограничивает разработку. Также робот в прямоходящей версии может комплектоваться колёсами, превращаясь в манёвренную колёсную платформу. По сути, это третий вариант использования платформы за те же деньги. Каждая рука Tron 2 имеет семь степеней свободы с запястьем условно человеческого строения и радиусом действия 70 см — крупнейшим в своём классе. Робот оснащён передовой системой восприятия, включая камеры полного обзора, и поддерживает мультимодальное зрение для адаптации к окружающей среде. В техническом плане Tron 2 демонстрирует значительные улучшения по сравнению с предыдущими моделями: грузоподъёмность в колёсно-пешеходном режиме достигает 30 кг (увеличение на 100 %), в режиме манипулятора — 10 кг (на обе руки), ёмкость батареи выросла на 80 %, добавлена функция автоматической подзарядки. Робот обладает низкой задержкой телеуправления (100 мс), активными системами безопасности и адаптивным управлением для передвижения в любую погоду. Прямоходящий режим использует визуальное планирование движения для преодоления препятствий, например лестниц с высотой ступеней до 20 см. Tron 2 позиционируется как универсальная платформа для исследований в области ИИ с роботизированным телом. Поставка включает открытый SDK, поддержку ROS1/ROS2, Python, совместимость с симуляторами (NVIDIA Isaac Sim, MuJoCo, Gazebo) и загруженные наборы данных для моделей VLA (Vision-Language-Action). Это позволяет разработчикам быстро осваивать технологии и создавать приложения для широкого спектра задач. Цена составляет $25 000 за полный комплект. О начале поставок пока не сообщается. CATL внедрила человекоподобных роботов на сборке тяговых батарей
19.12.2025 [08:01],
Алексей Разин
Гибкость настройки человекоподобных роботов начинает перевешивать фактор более высокой эффективности специализированных средств автоматизации на автосборочном производстве, поэтому представители автомобилестроительной отрасли всё чаще начинают использовать их на своих предприятиях. Китайская CATL, являющаяся крупнейшим в мире производителем тяговых батарей, тоже внедрила человекоподобных роботов. 
Источник изображения: CATL Ещё в среду, как сообщают китайские СМИ, отраслевой гигант заявил, что человекоподобные роботы нашли успешное применение на предприятии CATL в провинции Хэнань. Адаптированный для этих нужд человекоподобный робот Moz (Xiaomo) снабжается колёсным подиумом и мощной «мононогой», позволяющей регулировать положение корпуса по высоте. Пара рук-манипуляторов обеспечивает способность успешно осуществлять даже мелкие манипуляции типа подключения высоковольтных разъёмов при сборке тяговых батарей. Роботы такого типа внедрены CATL на участке тестирования готовых к отправке тяговых батарей. До этого подключением высоковольтных разъёмов к тестируемым батареям занимались люди, что не всегда можно было считать безопасными условиями труда. При обучении роботов используются большие языковые модели, позволяя постоянно совершенствовать их функциональные возможности. Отклонения в положении разъёмов или размерах тех или иных деталей не мешают роботу справляться с порученной работой. Усилия, с которыми осуществляется подключение и отключение разъёмов, варьируются динамически, не допуская повреждения компонентов. Испытания показали, что роботы Moz сопоставимы с квалифицированными рабочими по уровню операционной эффективности. Другими словами, роботы не отстают от людей по скорости выполнения операций. Роботы также способны идентифицировать дефекты тяговых батарей, поэтому они полноценно осуществляют проверку качества продукции на конвейере CATL. Они были разработаны компанией Spirit AI, в капитал которой CATL вкладывает свои средства. Неудивительно, что питаются роботы от батарей производства CATL. В отличие от рабочих, данные роботы не требуют перерывов на отдых, а потому обеспечивают производительность труда в три раза выше при условии безостановочной эксплуатации. CATL намерена расширять применение средств автоматизации, подразумевающих использование технологий искусственного интеллекта. iRobot признала фатальные ошибки, но слишком поздно — компания не слушала клиентов и проиграла китайцам
18.12.2025 [12:45],
Алексей Разин
Эта неделя началась с новости о предстоящем банкротстве одного из старейших производителей роботов-пылесосов — компании iRobot, которая известна продукцией под маркой Roomba. Нынешний руководитель «пионера рынка» обвинил предшественников в нежелании прислушиваться к потребностям клиентов, отрицании проблем и готовности бороться с конкурентами на справедливой основе. 
Источник изображений: iRobot Генеральный директор iRobot Гэри Коуэн (Gary Cohen) вступил в должность в мае прошлого года, но уже не мог предотвратить тот исход, к которому компания приблизилась в конце этого года. Упущенной возможностью спасти бизнес он считает несостоявшуюся сделку с Amazon, но в её развале следует винить недальновидность регуляторов, которые решили, что сохранение равных условий для конкуренции на рынке роботов-пылесосов важнее спасения бизнеса одного из старейших его игроков. Союз с Amazon дал бы iRobot возможность увеличить масштаб своего бизнеса и сохранить его. В 2022 году компании предлагали $1,7 млрд за её активы с учётом долговых обязательств, но к январю прошлого года сделка развалилась под натиском антимонопольных органов США и ЕС. Прежнее руководство как раз пыталось объяснять неудачи iRobot внешними факторами, но Коэун убеждён, что сама компания приняла не самые оптимальные стратегические решения пять или десять лет назад. Во-первых, iRobot словно навязывала технологии клиентам и не особо прислушивалась к их истинным потребностям. Во-вторых, оптимизации затрат не особо уделялось внимание, в результате китайские конкуренты смогли предложить сопоставимые по функциональным возможностям продукты со значительно более низкой стоимостью. Моющие роботы-пылесосы в своё время iRobot тоже отвергла как эволюционный путь развития. Перспективы повышения таможенных тарифов в США стали ещё одним «гвоздём в крышку гроба» iRobot в качестве независимого производителя. Фактически, компания задолжала $3,4 млн американским властям, а общая сумма её долговых обязательств превысила $352 млн. Нынешний глава iRobot не очень рад необходимости заключать сделку с китайской Picea Robotics, которая по заказу первой выпускала те самые роботы-пылесосы Roomba, но дело в том, что круг потенциальных покупателей оказался крайне узок. Некий альтернативный покупатель не смог договориться с iRobot и Carlyle — номинальным кредитором компании, а потому сделка с Picea Robotics оказалась почти безальтернативной.  В интервью Nikkei Asian Review глава iRobot признал, что производитель роботов-пылесосов Roomba недостаточно внимания уделял инновациям и не предлагал новых продуктов, которые были бы более конкурентоспособными по сравнению с китайскими. Отставание от конкурентов в сфере инноваций глава iRobot оценивает примерно в четыре года. Если в 2017 году компания контролировала примерно половину мирового рынка, то теперь её доля сократилась до 7 % по состоянию на первые семь месяцев этого года. Сейчас на этом рынке лидирует китайская Roborock, следом идёт Ecovacs Robotics. Помимо более низких цен, китайские производители роботов-пылесосов могут предложить и более широкую функциональность. Продажи продукции Roomba достигли пика в 2021 году и с тех пор только снижались. До 2024 года включительно компания регулярно отчитывалась о получении убытков по итогам очередного года. По признанию Коэуна, iRobot не слишком серьёзно воспринимала конкурентов, считая себя законодателем мод в сегменте. После сделки с Picea марка Roomba сохранит свою торговую сеть, инженерные функции будут делегированы представительству в Шанхае, а штаб-квартира и маркетинг будут американскими. Данные, собираемые роботами-пылесосами, продолжат храниться на серверах в США. Здесь же будут разрабатываться и новые программные приложения для Roomba. Японскому рынку, который в структуре продаж iRobot уступает только американскому и формирует 17 % выручки компании, продолжит уделяться особое внимание. После делистинга iRobot с биржи компания сохранит штат в размере примерно 500 человек, и это достижение глава производителя считает одним из основных достижений в сложившейся ситуации. На дорогах Китая появились роботы-регулировщики и машины, понимающие их жесты
17.12.2025 [11:54],
Алексей Разин
Светофор в качестве одного из средств регулирования движения появился значительно позже системы сигналов регулировщика, поэтому от водителей при получении прав традиционно требуется знание его жестов. В Китае бортовая система автопилота XPeng уже продемонстрировала способность подчиняться требованиям регулировщика, а ещё на улицах появились заменяющие их человекоподобные роботы. 
Источник изображений: YouTube, CGTN Вряд ли работу регулировщика можно считать престижной и комфортной, поскольку условия труда далеки от идеальных, а нагрузка высока даже в странах с высокой водительской дисциплиной. По этой причине власти китайского Ханчжоу справедливо предположили, что заменить регулировщика роботом необходимо при первой возможности. Специально разработанная для этих целей модель Hangxing No. 1 уже проходит испытания на одном из оживлённых перекрёстков Ханчжоу. Имеющий контрастную окраску и оснащённый проблесковыми маячками робот на колёсном подиуме способен регулировать дорожное движение при помощи жестов рук, а также распознавать нарушения и делать голосовые замечания провинившимся, а также свистеть для привлечения внимания. Он синхронизируется с муниципальной системой управления дорожным движением, а потому может работать вместе с окрестными светофорами. Дальнейшее обучение большой языковой модели должно позволить такому роботу более эффективно взаимодействовать с участниками дорожного движения. Пока перечень доступных роботу-регулировщику жестов ограничен, но зато он может эффективно фиксировать нарушения ПДД и даже идентифицировать тех, кто ездит на двухколёсном транспорте без шлема или переходит дорогу в неразрешённом месте.  Это не первый случай использования роботов для контроля за общественным порядком в Китае, поскольку в качестве патрульных человекоподобных роботов местная полиция начала использовать в рамках эксперимента ещё год назад. Попутно ресурс Electrek сообщил, что получившая недавно разрешение на тестирование систем автопилота третьего уровня на дорогах общего пользования в Гуанчжоу компания Xpeng продемонстрировала фрагмент видео с записью процедуры тестирования фирменного ПО в условиях передвижения по улицам китайских городов в тёмное время суток. На пути прототипа оказался мобильный пост полиции, который фильтровал транспорт с целью выявления нетрезвых водителей. Бортовая автоматика Xpeng смогла распознать жесты полицейского и подчинилась им, совершив остановку возле офицера, а затем продолжив движение после соответствующего разрешения. По словам Xpeng, все эти действия автоматика контролировала самостоятельно, вмешательства человека в процесс управления прототипом не было. iRobot подала заявку на банкротство — её купит производитель роботов-пылесосов Roomba
15.12.2025 [12:13],
Алексей Разин
Один из пионеров рынка роботов-пылесосов, компания iRobot, вчера подала заявление о защите в ходе процедуры банкротства, добавив, что рассматривает сделку с контрактным производителем легендарных Roomba в качестве основного сценария выхода из сложившегося кризиса. Активы iRobot должны быть выкуплены Picea Robotics, после чего первая фактически станет частной компанией. 
Источник изображения: iRobot iRobot свою озабоченность собственной способностью оставаться на рынке выразила ещё в марте этого года. Растущая конкуренция и угроза возросших таможенных пошлин поставили бизнес компании под угрозу, в результате чего она была вынуждена подать заявку о защите по статье 11 американского закона о банкротстве. В своём заявлении iRobot признаёт, что её прибыль истощается необходимостью вкладывать средства в новые разработки и снижать цены под давлением конкурентов. Она ещё сохраняет ведущие позиции на рынке роботов-пылесосов в США и Японии, но финансовое положение iRobot оставляет желать лучшего. В США она контролирует 42 % рынка, в Японии — все 65 %. Для рынка США компания выпускает свои пылесосы во Вьетнаме, а импорт с этого направления обложен пошлиной по ставке 46 %. В текущем году затраты iRobot только из-за роста тарифов увеличились на $23 млн, хотя выручка и составила более весомые $682 млн. Сумма долговых обязательств iRobot достигает $190 млн, в августе европейские антимонопольные органы заблокировали сделку, по которой Amazon предложила купить активы производителя роботов-пылесосов за $1,4 млрд. Из-за срыва сделки сумма долгов компании увеличилась, поскольку она должна была прибегнуть к новым заимствованиям для финансирования своей деятельности в Европе. Ситуацию усугубили задержки с платежами в адрес китайского подрядчика — компании Picea Robotics, которая фактически выпускает продукцию iRobot. Явно рассчитывая получить контроль над заказчиком, Picea выкупила долговые обязательства iRobot у группы кредиторов. Сделка с Picea подразумевает, что ей достанутся 100 % активов iRobot, а оставшуюся с 2023 года задолженность она покроет за свой счёт. Кроме того, Picea придётся «простить» iRobot долги за свои услуги на сумму $74 млн. Все прочие кредиторы получат свои средства в полном размере. Процедура банкротства, по словам представителей iRobot, не затронет операционную деятельность компании или работу фирменной инфраструктуры, включая приложения. Если в 2021 году бизнес iRobot оценивался в $3,56 млрд, то сейчас он стоит не более $140 млн, по данным LSEG. Компания была основана в 1990 году тремя выходцами из Массачусетского технологического института, до 2002 года она специализировалась на робототехнике оборонного назначения, прежде чем решила выпускать роботы-пылесосы Roomba. Штаб-квартира iRobot находится в Массачусетсе, штат компании состоит из 274 сотрудников. «Как обезьяны»: глава Figure AI о кошмаре ручного отбора лавины низкопробных резюме
15.12.2025 [06:21],
Анжелла Марина
Стартап Figure AI, разрабатывающий универсальных роботов-гуманоидов с искусственным интеллектом, стал объектом беспрецедентного интереса со стороны соискателей. Однако, несмотря на десятки тысяч откликов, компания нанимает лишь единицы сотрудников, а её основатель признался, что их отбор превратился в изнурительную рутину. 
Источник изображения: Figure AI За три года с момента основания в 2022 году стартап Figure AI получил почти 176 000 заявок на трудоустройство, но нанял лишь около 425 человек. Как пишет Business Insider, это означает, что шансы устроиться в компанию составляют менее 0,25 %, что делает её отбор строже, чем в любом университете «Лиги плюща» (Ivy League), и даже у Калифорнийского технологического института (Caltech) этот показатель равен 3 %. Основатель и генеральный директор Figure AI Бретт Адкок (Brett Adcock) опубликовал эти данные в соцсети X, добавив, что подавляющее большинство представленных работ являются «ерундой». Тем не менее, даже отсеивание таких заявок требует огромных усилий: по его словам, в системе отслеживания кандидатов (ATS) на каждое резюме уходит минимум 20 секунд. «Мы просматриваем их одно за другим, как обезьяны и это невероятно утомительно», — написал он. Адкок признал, что текущий процесс не масштабируется — компания тонет в волне низкокачественных заявок, и предположил, что, возможно, придётся создать специальную модель искусственного интеллекта, которая будет автоматически фильтровать резюме. Необходимость в ИИ для найма людей в компанию, создающую ИИ-роботов, по сути отражает более широкую тенденцию: рынок труда в технологическом секторе перегружен, средняя вакансия сегодня получает около 242 откликов (по данным Greenhouse), и подача заявок всё чаще сравнивается с «направлением резюме в чёрную дыру». Недавно Figure AI привлекла свыше $1 млрд в раунде серии C при оценке в $39 млрд и на текущий момент находится в самом ажиотажном сегменте, где за специалистов по ИИ и робототехнике идёт настоящая война с такими гигантами как Meta✴✴ и OpenAI, которые предлагают талантам пакеты выплат, достигающих сотен миллионов долларов. Чтобы привлечь лучших, стартапы предлагают не только доли, но и статус сооснователя или свободу для исследований — то, что крупные корпорации редко могут предоставить. Unitree запустит первый в мире «магазин» навыков для роботов
14.12.2025 [21:41],
Анжелла Марина
Китайская компания Unitree Robotics анонсировала запуск платформы, которая может кардинально изменить подход к обучению роботов-гуманоидов для практических целей. Вместо ожидания обновлений от производителя пользователи смогут скачивать и делиться готовыми наборами данных для обучения роботов, включая танцы, боевые искусства и другие умения, через специальный «магазин приложений». 
Источник изображений: humanoidsdaily.com В основе платформы, как поясняет издание Humanoids Daily, лежит библиотека действий (Action Library), в которую сторонние разработчики могут загружать собственные наборы движений, записанные и обученные на роботах Unitree. Другие пользователи могут находить эти наборы в каталоге и устанавливать их одним кликом. После загрузки через веб-интерфейс действия автоматически синхронизируются с мобильным приложением владельца робота и отображаются во вкладке Applet Library.  Платформа призвана решить хроническую проблему робототехники — ограниченную функциональность устройств без дополнительного программирования. Вместо ожидания официальных обновлений пользователи получат возможность расширять поведенческие навыки своих гуманоидов за счёт разработок, созданных сообществом. По словам Ван Синсиня (Wang Xingxing), генерального директора Unitree, именно дефицит разнообразных данных для обучения является главным препятствием на пути развития воплощённого ИИ (embodied AI), представляющего из себя искусственный интеллект с «телом», навыки которого можно развивать как у детей.  Помимо библиотеки действий, платформа включает раздел Datasets, где размещаются специализированные наборы данных, такие как Taekwondo Actions или Ballet Demonstration, предназначенные для дообучения алгоритмов. Разработчики, загружающие качественные материалы, получат вознаграждения, а сам процесс загрузки регулируется «Руководством разработчика», в котором описаны требования к идентификаторам действий и метаданным, обеспечивающим совместимость с внутренним API Unitree. Примечательно, что анонс платформы совпал с активной подготовкой компании к выходу на IPO и активным продвижением своего оборудования на массовый рынок. Однако расширение экосистемы несёт и риски: возможность запуска стороннего кода через «магазин приложений» может усилить уязвимости, особенно на фоне ранее выявленных проблем с безопасностью в продуктах Unitree. На момент публикации общедоступной ссылки на платформу ещё не предоставлено. Человекоподобные роботы начнут во всю работать на фабриках в ближайшие пять лет, предсказал глава Arm
10.12.2025 [13:21],
Алексей Разин
Консервативно настроенные специалисты по автоматизации производственных техпроцессов скептически оценивают идею применения человекоподобных роботов, но глава британского холдинга Arm считает, что им будет поручена существенная часть работы на производстве в ближайшие пять или десять лет. Их преимущество заключается в универсальности и гибкости программирования. 
Источник изображения: Nvidia, Figure Своими соображениями на этот счёт генеральный директор Arm Рене Хаас (Rene Haas) поделился на проходившей под эгидой Fortune конференции Brainstorm AI в Сан-Франциско. Напомним, британский холдинг Arm является разработчиком одноимённых процессорных архитектур, которые находят применение не только в мобильных устройствах и сфере промышленной автоматизации, но и в серверных системах, включая и ориентированные на работу с искусственным интеллектом. По словам главы компании, на каждого жителя нашей планеты, имеющего дело с современной техникой, в среднем приходится от 50 до 100 чипов с архитектурой Arm. Традиционные промышленные роботы заточены под выполнение узкого спектра задач, они ограничены не только программными рамками, но и аппаратными. Человекоподобные роботы не только более универсальны с точки зрения выполняемых операций, они будут оснащены программным обеспечением, реализующим принцип «физического ИИ». Это позволит быстро и эффективно обучать их выполнению новых операций. «Я думаю, что в ближайшие пять лет роботы начнут выполнять существенную часть работы на фабриках — отчасти это обусловлено тем, что эти роботы с физическим ИИ могут быть перепрограммированы на выполнение различных задач», — заявил глава Arm. Поскольку таких роботов не нужно будет затачивать на пожизненное выполнение одной операции, внутренняя компоновка предприятий изменится, а человекоподобные роботы смогут заменить собой существенную часть рабочих на фабриках, как убеждён Хаас. Он не стал обсуждать судьбу сокращаемых рабочих, но подчеркнул, что за счёт активной роботизации можно будет устранить те перекосы в глобальной экономике, которые существовали до недавних пор. Условно говоря, ради снижения затрат не нужно будет располагать производственные предприятия в странах с дешёвой рабочей силой и усложнять сопутствующую логистику. Хаас заодно отметил, что в сфере автопилота на транспорте развитие ИИ также позволит упростить оснащение будущих беспилотных машин. Количество радаров и камер, по его мнению, можно будет уменьшить после создания хорошо обученного ПО, которое в меньшей степени будет полагаться на получаемую с датчиков информацию. Говоря об угрозах для современной полупроводниковой промышленности, глава Arm выделил высокую концентрацию компетенций в определённых сферах. Многое в сфере производства чипов, например, зависит от TSMC и ASML, но вся мировая отрасль учится жить с этим риском сверхконцентрации, и минувшая пандемия стала для многих участников рынка хорошим уроком. Гендир EngineAI рискнул здоровьем и вышел на кулачный бой с роботом своей компании
09.12.2025 [16:21],
Геннадий Детинич
Анонсированный 2 декабря 2025 года человекоподобный робот T800 китайской компании EngineAI своим кун-фу произвёл фурор в социальных сетях. На компанию посыпались обвинения в фальсификации и использовании компьютерной графики, поскольку, по мнению большинства, роботы не могут обладать показанной пластичностью движений. Ответ директора EngineAI был прост и лаконичен: он облачился в защитные доспехи и вышел на бой против T800, чтобы держать удар при свидетелях. 
Источник изображения: EngineAI Строго говоря, генеральный директор EngineAI Чжао Туньян (Zhao Tongyang) не собирался драться с роботом собственного производства. В его задачу входило выдержать удар, нанесённый роботом в прыжке, и при этом не сильно пострадать. Роботу хватило одного удара, чтобы сбить человека с ног. При весе T800 в 75 кг это неудивительно — да ещё с разгона. Главе компании хватило впечатлений, чтобы признаться в желании больше никогда так не делать.
Робот T800 — это 173-сантиметровый человекоподобный робот с 29 степенями свободы, способный развивать в суставах крутящий момент до 450 Н·м (на каждую руку приходится по 7 степеней свободы). Он использует процессор Intel N97 и модуль Nvidia Jetson AGX Orin 64 Гбайт для задач ИИ, а также лидар с 360-градусным обзором для навигации. Максимальная скорость передвижения робота достигает 3 м/с. Без лидара ему было бы сложно не задевать окружающих и препятствия. Цена робота EngineAI T800 начинается с $25 000 за базовую модель. Модель с открытым исходным кодом предлагается за $33 000, модель Pro с модернизированным процессором — за $38 500, а флагманская модель Max — за $50 000. Внесение предоплаты в размере $700 на странице предварительного заказа на сайте JD.com гарантирует доставку роботов в июне 2026 года. 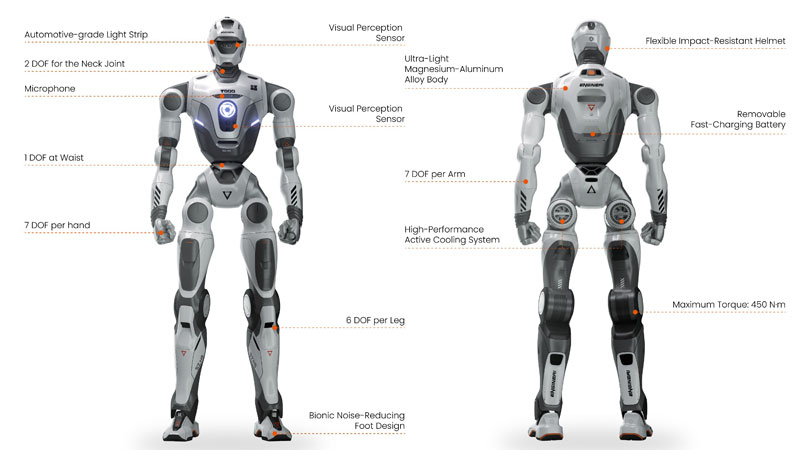 Робот T800 создавался не для боёв. Это модель для производства. Способность к боевым движениям — это тест на устойчивость и координацию. Глядя в отдалённую перспективу, нетрудно представить, что такая продукция может быть двойного назначения. Я устал, я полежу: робот Tesla Optimus картинно рухнул на мероприятии, потеряв связь с оператором
08.12.2025 [13:50],
Алексей Разин
Компанию Tesla не раз уличали в использовании удалённых операторов для управления человекоподобными роботами Optimus на разного рода презентациях, и недавнее мероприятие в Майами не стало исключением. Очевидцы засняли, как уполномоченный раздавать посетителям напитки робот внезапно вскидывает руки и заваливается на спину. 
Источник изображения: Reddit, Decent_Cheesecake643 По сути, курьёзности ситуации добавляет не сам факт падения робота, а специфический жест за мгновение до этого. Характерное движение руками, которое делает робот, напоминает попытку снять очки виртуальной реальности оператором, который им управлял. По всей видимости, после резкого снятия очков оператором робот выходит из-под контроля и беспомощно заваливается на спину. Это движение лишь доказывает, что робот до момента падения управлялся человеком с помощью гарнитуры дополненной реальности. Кстати, в использовании подобной технологии для обучения роботов нет ничего необычного — Tesla не раз, хотя порой и не специально, демонстрировала такую связку из Optimus и контролирующего его движения оператора. Тем не менее, на публичных презентациях оператор используется не для обучения, а с целью обеспечения контроля за движениями робота при взаимодействии с людьми. Научить робота танцевать оказалось гораздо проще, чем работать на заводе
08.12.2025 [13:45],
Алексей Разин
Китайские производители активно осваивают выпуск человекоподобных роботов, рассчитывая определить лидерство на мировом рынке на стадии его формирования. В частности, китайская компания Agibot уже выпустила 5000 человекоподобных роботов, хотя была основана лишь в 2023 году. По словам её представителей, обучить робота танцу не так сложно, как приёмам работы на производстве. 
Источник изображения: Agibot Финансовую поддержку Agibot оказывают крупные стратегические инвесторы в лице BYD, Tencent и Baidu. В прошлом году, по данным Goldman Sachs и Bank of America Global Research, мировой рынок человекоподобных роботов ограничился 3000 проданных экземпляров, поэтому даже способные произвести несколько тысяч роботов компании способны серьёзно влиять на рыночную ситуацию. В текущем году, по мнению экспертов, объёмы поставок человекоподобных роботов будут варьироваться от 18 000 до 25 000 штук. Agibot старается создавать универсальных роботов, а не концентрироваться на выполнении узкого спектра задач. При обучении роботов функциональные задачи формулируются не только на языке, но и с использованием прочих каналов восприятия, включая визуальные и тактильные. Роботы уже научились танцевать, демонстрировать характерные для традиционной китайской гимнастики движения, а также выступать в роли экскурсоводов или патрульных при осмотре территорий. По словам главного маркетолога Agibot Цю Хэна (Qiu Heng), научить робота танцевать довольно просто, а вот для обучения производственным операциям требуется больше времени и усилий. Компания ставит перед собой задачу создания человекоподобных роботов, которые поэтапно находят всё новые сферы применения. Через три или пять лет такие роботы уже начнут применяться в домашнем хозяйстве. Все роботы Agibot устроены таким образом, что их управляющее программное обеспечение постоянно совершенствуется. Некоторые производители считают рациональным более узкую специализацию роботов. Например, пекинская компания Galbot выделила три основных направления обучения, среди которых фигурируют розничная торговля и промышленное производство. Роботы этой марки уже хорошо обучены ориентироваться в розничных магазинах и взаимодействовать с товарами на полках. Рациональный подход исповедуется и при выборе кинетической схемы роботов: они оснащаются колёсным основанием вместо пары ног. Обе указанные китайские компании опираются на компонентную базу и программное обеспечение Nvidia, как и Unitree или UBTech. На рынке США видными игроками в сегменте человекоподобных роботов являются Tesla, Agility Robotics и Boston Dynamics. Амбиции в этой сфере проявляют Xiaomi, Xpeng и Samsung Electronics. При этом старожилы отрасли промышленной автоматизации типа ABB, Fanuc и Kawasaki Heavy проявляют мало интереса к созданию универсальных человекоподобных роботов, по словам представителей отрасли и экспертов. 
Источник изображения: UBTech Robotics По словам представителей компании Dobot, создание человекоподобных роботов для применения на производстве пока не оправдывает себя экономически во многих ситуациях. Люди в этой сфере пока проявляют себя эффективнее, да и специализированные роботы в прочих случаях оказываются лучше человекоподобных. Аналитики Morgan Stanley считают, что к 2050 году численность эксплуатируемых в мире человекоподобных роботов достигнет 1 млрд штук. Внедрение таких роботов ускорится после 2035 года, поскольку к тому времени будет накоплена критическая масса технологий для создания более естественных в своём поведении роботов универсального назначения. Перед отраслью маячит и довольно серьёзное препятствие в виде так называемого «парадокса Моравца», который гласит, что если компьютеры могут достичь интеллектуального уровня взрослого человека в решении определённого спектра задач довольно легко, то обучить роботов до уровня двигательных функций годовалого ребёнка весьма сложно. Специалисты подчёркивают, что создание схожей по кинематике с человеческой роботизированной руки остаётся довольно сложной, но крайне важной задачей. Аналитики Morgan Stanley поясняют, что охлаждение «мозга» роботов, создание суставов и эффективных тяговых батарей являются одними из главных вызовов с технологической точки зрения. Бывший глава Intel Патрик Гелсингер (Patrick Gelsinger), кроме того, убеждён, что главной проблемой для человекоподобных роботов остаётся безопасность их эксплуатации в условиях тесного соседства с человеком. По этой причине такие роботы если и начнутся применяться в быту, то случится это не очень скоро. Midea Group показала шестирукого робота с колёсами и назвала его человекоподобным
08.12.2025 [07:51],
Алексей Разин
Кинематику человеческого тела в ряде случаев сложно назвать оптимальной, поэтому китайская Midea Group для задач промышленной автоматизации решила создать шестирукого робота Miro U, который к тому же передвигается на оснащённой колёсами подставке, а не паре нижних конечностей, как человек. 
Источник изображения: Humanoids Daily При всём этом разработчики считают Miro U человекоподобным роботом, пусть и с приставкой «сверх». По их замыслу, такой робот должен преодолеть ограничения, свойственные физиологии человека, и предложить повышенную эффективность манипуляций. В частности, благодаря двум дополнительным парам верхних конечностей, он может одновременно выполнять больше операций, удерживая грузы силами нижней пары. При этом оснащённая колёсами база позволяет роботу поворачиваться на 360 градусов в стеснённом пространстве. Опытная эксплуатация шестирукого робота начнётся в конце этого месяца на китайском предприятии Midea Group, где собираются стиральные машины. Наличие шести рук также ускоряет процедуру смены инструмента при работе на производстве. На отдельных операциях такой робот должен продемонстрировать возросшую на 30 % эффективность, как рассчитывают разработчики. При всём этом Midea параллельно намерена развивать линейку сервисных роботов Meila, которые чаще всего будут повторять структуру человеческого тела. Их эксплуатация на складах и в магазинах начнётся в следующем году. Видео: новый человекоподобный робот Unitree избил другого в тестах на прочность
05.12.2025 [13:42],
Геннадий Детинич
На днях китайская компания Unitree Robotics опубликовала на своём официальном YouTube-канале короткое, но впечатляющее видео под названием «Unitree 1.8m Humanoid Robot Every Punch Comes Through!». Главный герой — новый человекоподобный робот H2 (рост 180 см, вес около 70 кг), провёл спарринг-бой с меньшим роботом G1. Кульминацией стал мощный удар коленом в корпус G1, от которого тот отлетел в сторону и частично разобрался. 
Источник изображения: Unitree Robotics Компания спешит подчеркнуть, что данное видео — не демонстрация агрессии, а проверка прочности конструкции, её стабильности и способности выдерживать экстремальные нагрузки. Видео за двое суток набрало миллионы просмотров и стало вирусным. Робот Unitree H2, представленный в октябре 2025 года, считается на данный момент самым развитым человекоподобным роботом компании. Он обладает 31 степенью свободы, улучшенными трёхосевыми суставами в талии и бёдрах, а также значительно увеличенной мощностью приводов (по сравнению с предыдущим флагманом H1). Удар коленом в видео — это не постановка и не театральный бесконтактный бой: G1 действительно получает реальный удар, а H2 сохраняет идеальный баланс после контакта. Подобный навык позволит роботам выдерживать неожиданные нагрузки в условиях промышленной эксплуатации. Отдельным аспектом распространяемого видео стал интерес разработчиков и публики к спортивной робототехнике. В ноябре 2025 года Unitree уже объявила о партнёрстве с американскими лигами роботизированного бокса UFB и REK, а в декабре H2 стал одним из главных экспонатов на Международной выставке роботов в Токио. Демонстрация силы H2 воспринимается как заявка Китая на технологическое лидерство в сегменте доступных высокопроизводительных человекоподобных роботов (цена H2 оценивается примерно в $30 000). Многие эксперты считают, что подобные тесты — это не только маркетинг, но и подготовка к будущим соревнованиям роботов по правилам, близким к человеческому боксу или ММА. В следующем году Hyundai начнёт продавать модульные роботизированные тележки MobED
03.12.2025 [15:27],
Алексей Разин
В структуре южнокорейского автопроизводителя Hyundai Motor робототехническое подразделение Robotics Lab развивается с 2019 года, а двумя годами позже оно приросло американским стартапом Boston Dynamics. По всей видимости, первым серийным плодом их совместного творчества станут роботизированные тележки MobED, выпускать которые Hyundai начнёт в следующем году. 
Источник изображений: Hyundai Пока нет данных ни о цене таких роботов, ни о предполагаемых объёмах производства, но за первые три года компания рассчитывает довести их до 10 000 штук. Покупателям будут предложены две разновидности роботизированных тележек MobED: с суффиксами Pro и Basic соответственно. Если первая будет оснащена фирменным набором датчиков и программным обеспечением, допускающими автономное передвижение, то вторая очевидно будет дешевле и станет своего рода «заготовкой» для установки собственных управляющих элементов клиентом, хотя режим ручного управления при этом обеспечит в состоянии «из коробки».  Камеры, лидары и прочие датчики помогут автоматике самостоятельно подстраиваться под рельеф местности. Четырёхколёсные тележки MobED оснащаются эксцентриковыми приводами, позволяющими поднимать платформу над опорной поверхностью на высоту до 100 мм от базовой. С учётом базового дорожного просвета в 100 мм, это позволяет тележке преодолевать препятствия высотой до 200 мм, включая бордюры. При этом автоматика может постоянно удерживать горизонтальное положение платформы даже при передвижении по пересечённой местности. Максимальная скорость передвижения не превысит 10 км/ч, но она достижима не во всех положениях платформы. В зависимости от варианта исполнения, робот может весить 78 или 88 кг, причём изначально более тяжёлая автоматически управляемая версия Pro способна брать на борт не более 47 кг груза, тогда как версия Basic способна перевозить на 10 кг больше. На платформу можно устанавливать различные надстройки. Такая самодвижущаяся тележка может использоваться как для доставки товаров без участия человека, так и для перевозки инвентаря за любителем игры в гольф, а ещё ей можно найти применение в кинопроизводстве. Самое же главное предназначение таких роботов, по мнению представителей Hyundai, заключается в замене человека на опасных для здоровья объектах. Версия MobED Pro с учётом антенны имеет габаритные размеры 750 × 1150 × 650 мм, версия Basic на 220 мм ниже.  Тяговая батарея ёмкостью 1,47 кВт‧ч позволяет тележке работать в течение более чем четырёх часов без подзарядки, на восстановление заряда уходит не более двух с половиной часов. К сожалению, эксплуатация роботов при минусовых температурах не предусмотрена вовсе, хотя защита по классу IP54 подразумевает их использование на улице. К слову, и зарядку тяговой батареи тоже необходимо осуществлять при температуре окружающего воздуха от 1 до 35 градусов Цельсия выше нуля. Гендир Xiaomi рассказал, когда человекоподобные роботы начнут заполонять предприятия компании
01.12.2025 [11:43],
Алексей Разин
Активное использование специализированной робототехники на автосборочных предприятиях Xiaomi не является чем-то экстраординарным для молодого автопроизводителя, но в своём недавнем интервью основатель компании Лэй Цзюнь (Lei Jun) дал понять, что через пять лет на заводах марки будут активно применяться человекоподобные роботы. 
Источник изображения: Xiaomi Он также подчеркнул, как сообщает GizmoChina со ссылкой на IT Home, что искусственный интеллект более не является «периферийным инструментом», а становится основным фактором трансформации промышленности во многих отраслях. В качестве примера глава Xiaomi ссылается на собственные автосборочные предприятия, где внедрена не только технология изготовления крупных монолитных кузовных фрагментов методом литья под давлением, но и система контроля качества этих изделий. Традиционно для поиска дефектов в таких элементах конструкции применяется рентгеновское оборудование, но Xiaomi доверила ИИ анализировать результаты проверки каждой детали на этом участке. Обученная поиску дефектов по изображению с рентгенографического оборудования ИИ-модель справляется с задачей за две секунды, обходя живого специалиста в десять раз по скорости и более чем в пять раз по точности. По словам Цзюня, рынок промышленной автоматизации в эпоху внедрения ИИ может вырасти до $140 млрд в год, но здесь важно координировать усилия всех участников рынка, чтобы нужные компетенции доставались всем быстрее благодаря активному сотрудничеству. В течение ближайших пяти лет Xiaomi на своих фабриках начнёт активное использование человекоподобных роботов. Они смогут заменить людей на ряде операций. При этом рынок человекообразных роботов значительно шире, по словам основателя Xiaomi, со временем они будут активно применяться и в быту. Специалисты по ИИ и робототехнике сходятся во мнении, что именно бытовое применение роботов с точки зрения их обучения и безопасности эксплуатации представляет более сложную задачу, поскольку на производстве окружающая среда более формализована и предсказуема. Своего первого человекоподобного робота CyberOne в виде концепта Xiaomi продемонстрировала ещё в 2022 году. Лэй Цзюнь считает, что ИИ и робототехника позволят построить в Китае передовую экономику, которая больше не должна будет строиться исключительно на дешевизне рабочей силы. Похоже, власти КНР эти взгляды разделяют, а потому активно поддерживают разработки в данной сфере. Кстати, на прошлой неделе стало известно, что Xiaomi наняла опытного инженера Tesla, который работал над созданием человекоподобных роботов Optimus. Судя по записям Зака Лу Цзэю (Zach Lu Zeyu) в профильной социальной сети, в Xiaomi он будет специализироваться на создании кистевых манипуляторов. В Tesla он как раз занимался разработкой и программированием рук роботов, отвечая и за тактильное восприятие информации, помимо прочего. |
|
✴ Входит в перечень общественных объединений и религиозных организаций, в отношении которых судом принято вступившее в законную силу решение о ликвидации или запрете деятельности по основаниям, предусмотренным Федеральным законом от 25.07.2002 № 114-ФЗ «О противодействии экстремистской деятельности»; |
© 1997—2026 Электронное периодическое издание "3ДНьюс" | Свидетельство о регистрации СМИ Эл ФС 77-22224
выдано Федеральной Службой по надзору за соблюдением законодательства в сфере массовых коммуникаций и охране культурного наследия
При цитировании документа ссылка на сайт с указанием автора обязательна. Полное заимствование документа является
нарушением
российского и международного законодательства и возможно только с согласия редакции 3DNews.








 MWC 2018
MWC 2018 2018
2018 Computex
Computex



