







 MWC 2018
MWC 2018 2018
2018 Computex
ComputexКитайские исследователи протестировали новый, гораздо более быстрый и простой метод обучения роботов игре в теннис, который, судя по результатам, можно считать прорывом в машинном обучении и реальном ИИ, сообщил ресурс New Atlas.






Источник изображений: Zhang et al, Tsinghua university
В теннисе, как и в большинстве других видов спорта, технологии захвата движений пока не могут считывать мельчайшие нюансы угла запястья при ударе по мячу, чтобы выполнять его с необходимой точностью. Ситуация на теннисном корте слишком динамична, чтобы использовать дистанционное управление, утверждают исследователи.
По словам исследователей, попытки извлечения такой информации из многокамерных видеозаписей с помощью программного обеспечения для обучения ИИ, такого как Vid2Player3D от Nvidia, являются «сложным процессом», который «может потребовать значительных экспертных знаний и инженерных усилий».
Вместо этого исследователи разработали систему LATENT, основанную на захвате движений, но только для базовых элементов техники и предназначенную для работы с неполными данными. В ходе текущего эксперимента исследователи использовали данные захвата движений за пять часов, в которых спортсмены демонстрировали «примитивные навыки» игры в теннис: удары справа и слева, боковые перемещения и перекрёстные шаги, выполняемые на площади, составляющей лишь часть стандартного теннисного корта.
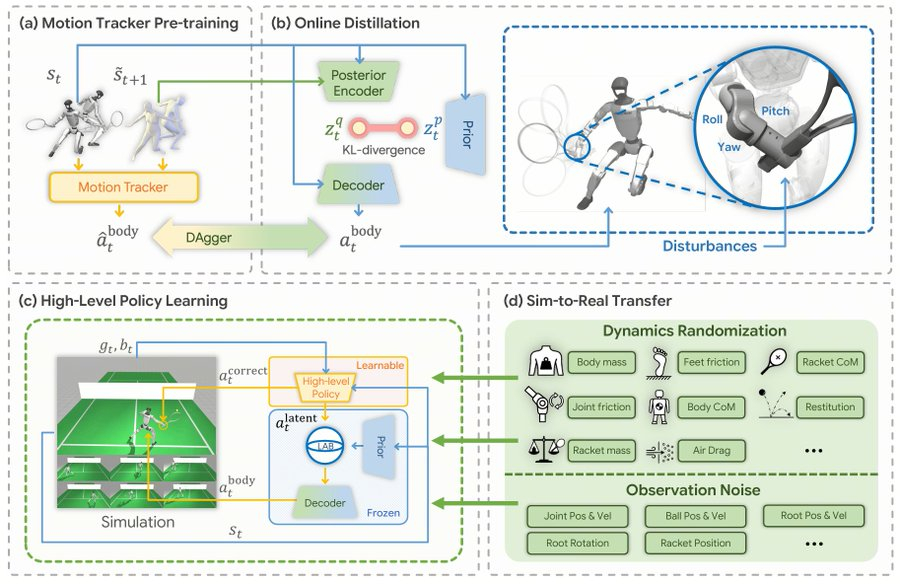
Исследователи обработали эти данные с помощью камер, чтобы создать репертуар человекоподобных «пространств движения», а затем загрузили эти базовые навыки в гуманоидного робота G1 от Unitree, доступного по цене $13,5 тыс.
Используя базовые навыки, робот должен был с помощью системы LATENT выполнить поставленную задачу — увидеть приближающийся теннисный мяч и с помощью ракетки перебросить его через сетку: «Успех — это когда мяч приземлится на противоположной стороне корта в пределах площадки, ограниченной белыми линиями».
Обладая базовыми навыками ударов по мячу, робот мог экспериментировать со всеми остальными деталями: углами, временем, выбором движений для различных ситуаций и моментами, когда следует выходить за рамки обученных движений. Подавляющая часть обучения проходила с очень высокой скоростью с использованием симуляции.
В результате G1 успешно отбивал удары справа примерно в 90 % случаев и удары слева — чуть менее чем в 80 %, причём его движения выглядят ловкими и плавными, как у настоящего теннисиста. Конечно, робот пока не готов к соревновательным матчам, но вместе с тем он добился значительного прогресса в освоении игры.
Хотя это не совсем та рутинная, монотонная работа, которую, как ожидается, роботы будут выполнять вместо людей, благодаря разработке китайских исследователей они смогут быстро обучаться управлять своим телом в экстремальных условиях и справляться со сложными и динамичными ситуациями, что будет полезно в более практических задачах.
Программное обеспечение LATENT относится к категории open source и доступно на GitHub.
Источник:





