|
Опрос
|
реклама
Быстрый переход
Китайская АМС «Чанъэ-6» доставила на орбиту образцы грунта с обратной стороны Луны — в истории Земли такого ещё не бывало
04.06.2024 [08:39],
Геннадий Детинич
Сегодня утром в 07:38 по пекинскому времени (02:38 мск) взлётный модуль китайской автоматической межпланетной станции «Чанъэ-6» поднял на орбиту спутника образцы грунта собранного на обратной стороне Луны. Это новая глава в истории земной космонавтики. В распоряжении учёных ещё не было образцов с невидимой с Земли стороны спутника. 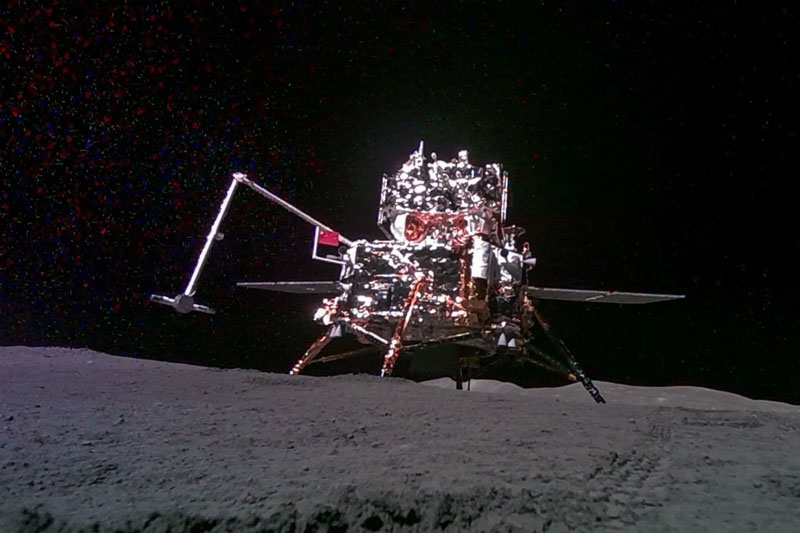
Спускаемый лунный модуль «Чанъэ-6» на поверхности (снимок сделан мобильной камерой миссии). Источник изображения: CNSA Значительный объём операций станция производила в автоматическом режиме. С Земли также передавались инструкции, которые доходили до аппарата благодаря спутнику-ретранслятору «Цюэцяо-2». Для исключения случайностей при сборе образцов, на Земле вокруг точной копии посадочного модуля была воспроизведена та же обстановка, что и вокруг модуля «Чанъэ-6» на Луне. Сбор образцов начался с бурения, после чего роботизированный манипулятор добавил пробы грунта и камней с поверхности Луны. Всего было собрано около 2 кг образцов. Они были запечатаны в герметичную капсулу и помещены во взлётный модуль. Модуль поднял капсулу на орбиту Луны, где он позже состыкуется с орбитальным и возвращаемым модулем. Затем в течение примерно трёх недель образы будут доставлены на Землю — их в капсуле сбросят на севере Китая. Миссия АМС «Чанъэ-6» стартовала 3 мая 2024 года. 9 мая станция вышла на орбиту Луны. Прилуненние состоялось 2 июня. Спускаемый модуль опустился в бассейне Аполлон внутри бассейна Южный полюс – Эйткен. Это один из старейших ударных кратеров на спутнике. Образцы из него много расскажут о ранних этапах геологической истории Луны. И если этого мало, то миссия «Чанъэ-6» стала значительным шагом вперёд по технологическому пути развития космонавтики. Китайский зонд «Чанъэ-6» прилунился для первого в истории сбора грунта с обратной стороны Луны
02.06.2024 [22:20],
Андрей Созинов
Китайский лунный зонд «Чанъэ-6» совершил посадку на обратной стороне Луны в воскресенье утром, чтобы осуществить историческую миссию по сбору образцов грунта с этой области. Об успешном прилунении сообщило Китайское национальное космическое управление (CNSA). 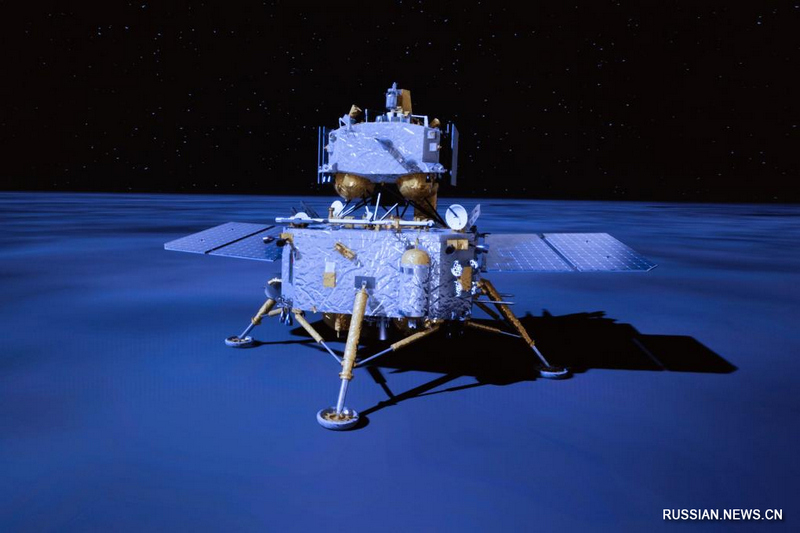 С помощью спутника-ретранслятора «Цюэцяо-2» комбинация посадочного и взлетного модулей «Чанъэ-6» благополучно приземлилась в заранее выбранной зоне — в бассейне Аполлон, который расположен внутри бассейна Южный полюс – Эйткен. Выбор обусловлен научной ценностью района и подходящими условиями для связи и дистанционного управления, а также относительно ровным рельефом местности, сообщил Хуан Хао (Huang Hao), эксперт из Китайской корпорации аэрокосмической науки и технологий (CASC). Хуан Хао отметил, что рельеф на обратной стороне Луны более пересечённый, чем на видимой стороне, с меньшим количеством ровных участков. Однако бассейн Аполлон отличается относительной ровностью, что делает его более подходящим для посадки. После приземления «Чанъэ-6» в течение двух дней соберёт образцы лунного грунта, используя бур для проб с подповерхностных слоев и роботизированную руку для захвата поверхностных образцов. Отмечается, что команда разработчиков «Чанъэ-6» построила лабораторию, чтобы провести моделирование и обеспечить бесперебойный процесс сбора образцов. 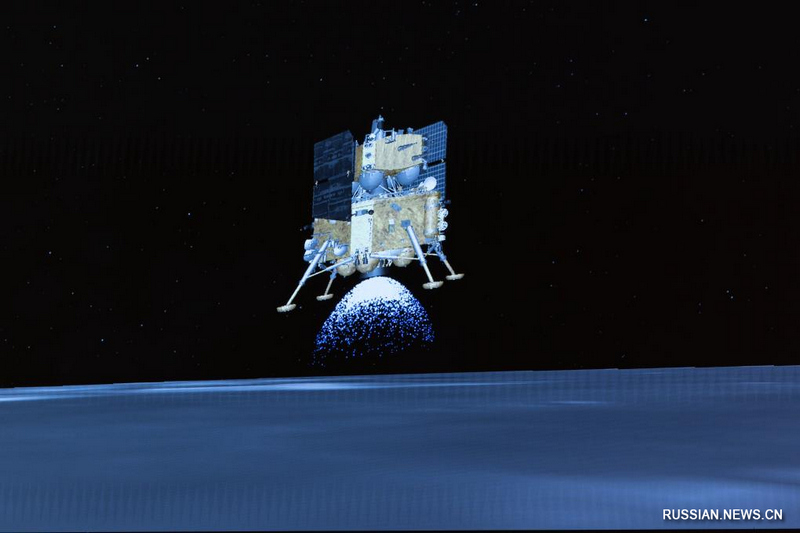 Команда создаст полномасштабную копию зоны сбора образцов, основываясь на данных «Чанъэ-6» об окружающей среде, камнях вокруг и состоянии грунта вокруг места посадки. С помощью такого моделирования будут разработаны и проверены стратегии сбора образцов и методы управления оборудованием, чтобы обеспечить точность выполнения операций. 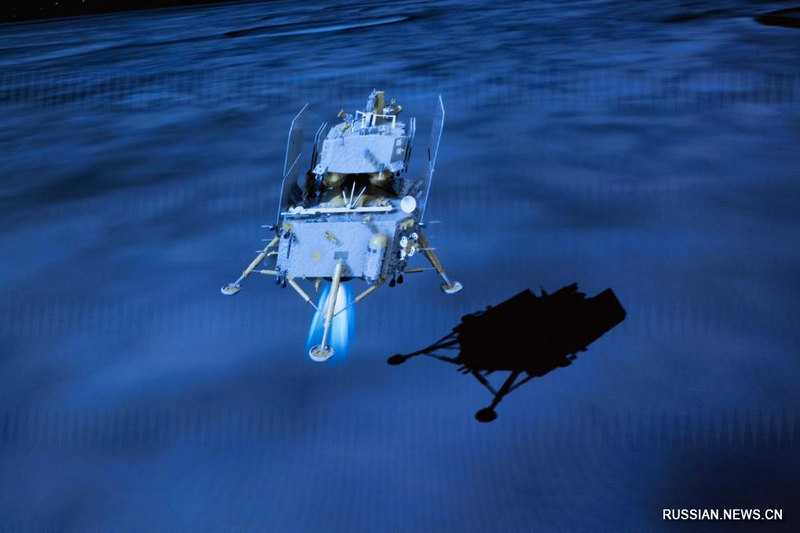 Для связи с аппаратом на обратной стороне Луны используется спутник-ретранслятор «Цюэцяо-2», который был запущен заблаговременно. Однако из-за препятствий, создаваемых Луной, окно для связи короче, чем на видимой стороне. Поэтому у «Чанъэ-6» будет примерно 14 часов на сбор образцов. Для сравнения, аппарат «Чанъэ-5» на видимой стороне Луны имел около 22 часов. Чтобы повысить эффективность и сэкономить время, процесс сбора образцов сделали более интеллектуальным. «Чанъэ-6» способен выполнять команды и давать оценки автономно, уменьшая необходимость в частом взаимодействии между Землей и Луной, пояснили в CNSA. Например, после отправки команды наземным центром управления, зонд выполнит соответствующую программу, используя данные от датчиков в режиме реального времени для оценки правильности выполнения. Во время миссии «Чанъэ-5» было отправлено около 1 000 инструкций. Ожидается, что в случае «Чанъэ-6» их число сократится до примерно 400. Японский лунный модуль SLIM четвёртую ночь на Луне не пережил — его миссия окончена
29.05.2024 [08:40],
Геннадий Детинич
Японское агентство аэрокосмических исследований (JAXA) сообщило в сети X (бывшая Twitter), что 27 мая было последним днём, когда посадочный лунный модуль SLIM всё ещё мог выйти на связь. Но этого не произошло. Аппарат не смог пережить четвёртую ночь на Луне, когда температура на её поверхности опускается до -170 C°. 
Положение модуля SLIM на Луне после прилунения в представлении художника. Источник изображения: JAXA Впрочем, в задачи модуля не входила даже одна ночёвка. Его оборудование не имело надлежащей защиты от сверхнизких лунных ночных температур. Тем не менее, модуль просыпался после трёх ночей на Луне подряд, перезагружался, выходил на связь с Землёй и передавал изображения со своих камер. Способность оставаться рабочим после суровых ночёвок стала своеобразной компенсацией для миссии, которая едва не закончилась полным провалом в самом начале. Незадолго до касания поверхности SLIM потерял одну из двух дюз посадочных двигателей, что привело к боковому смещению и опрокидыванию при посадке. Фактически он присел на голову, что затруднило работу части оборудования и, что самое плохое, направило солнечные батареи в сторону от его лучей. В оказавшейся позиции модуль мог заряжать аккумуляторы только часть светового дня на Луне. В то тоже время главную свою задачу он выполнил — спустился на поверхность со снайперской точностью. Миссия отрабатывала посадку в строго заданном районе, что будет важно для посадок в районе изрытого кратерами южного плюса Луны. Модуль должен был спуститься на поверхность с отклонением не более 100 м от целевой точки. Он сделал это с отклонением 55 м. Если бы не опрокидывание, миссия была бы абсолютно успешной и даже более, с учётом трёх ночёвок модуля на спутнике. Начало новой ночи на Луне лишает команду SLIM надежды на его перезагрузку в мае. Скорее всего, модуль больше не сможет включиться, и его миссия может считаться теперь уже точно оконченной. Роборуки от MIT помогут астронавтам NASA встать после падения на Луне
17.05.2024 [20:32],
Сергей Сурабекянц
Упавшему астронавту в скафандре не позавидуешь — попытки подняться на Луне или планете с другой гравитацией напоминают о печальной судьбе перевёрнутой на спину черепахи. Поэтому для запланированного возвращения людей на Луну в сентябре 2026 года исследователи Массачусетского технологического института подготовили SuperLimbs — пару роботизированных конечностей, выдвигающихся из скафандра, чтобы помочь астронавту встать обратно на ноги с минимальными усилиями. 
Источник изображений: MIT «Астронавты физически очень развиты, — считает профессор Массачусетского технологического института Гарри Асада (Harry Asada). — Но на Луне гравитация составляет одну шестую от земной при неизменной инерции. Скафандр является значительным бременем и может сковывать движения. Мы хотим предоставить астронавтам безопасный способ встать на ноги в случае падения». На видео ниже неуклюжие попытки астронавта встать вызывают смех, хотя на самом деле смешного в этом мало, а проблема адаптации и уверенного передвижения по поверхности другой планеты достаточно серьёзная. SuperLimbs были разработаны ещё 10 лет назад и с тех пор применяются в судо-, авиастроении и строительстве. В ходе общения с NASA разработчики выяснили, что проблема падения на Луне представляет собой серьёзный риск для астронавтов и внесли некоторые изменения в конструкцию с учётом космической специфики и другого уровня гравитации.  Исследователи провели ряд экспериментов, снабдив группу добровольцев жёсткой, тяжёлой и громоздкой экипировкой и заставив их подниматься с пола всеми возможными способами. Выяснилось, что 80 % людей пытаются подняться, выполняя определённую последовательность действий. Затем был разработан контроллер, который с помощью роботизированной конечности помогал людям вставать, причём со стороны это напоминало действия барона Мюнхгаузена, который сам вытащил себя из болота за волосы. Убедившись, что они на правильном пути, учёные модернизировали систему SuperLimbs, которая получила две многосуставные «руки» по обе стороны рюкзака для скафандра. В рюкзаке также находится система управления и дыхательный аппарат. Теперь устройство может использоваться не только для помощи при падении, но и для повышения производительности за счёт стабилизации положения тела, прогнозирования и предотвращения падений. Использование SuperLimbs также помогает снизить метаболическую активность астронавта, что позволяет экономить кислород и увеличивать автономность. Стоит упомянуть и о не самом типичном применении устройства — переход в «четвероногий режим», в котором астронавт превращается в своего рода лунного кентавра.  В Лаборатории реактивного движения NASA планируют изготовить вариант SuperLimbs из «космических», максимально облегчённых материалов и затем испытать его вместе со скафандром на симуляторах низкой гравитации. Специалисты NASA полагают, что устройство SuperLimbs может помочь астронавту быстрее восстановиться после падений, работать более продуктивно и продлить время нахождения в безвоздушном пространстве. NASA рассказало о будущих «железных дорогах» на Луне — реализация проекта стартует в 30-е
10.05.2024 [21:12],
Геннадий Детинич
Не секрет, что Луна рассматривается в качестве производственной и перевалочной базы на пути к Марсу и дальше к отдалённым уголкам Солнечной системы. Это подразумевает создание разветвлённой транспортной сети на поверхности Луны для перевозки грузов вплоть до добываемых на спутнике материалов: воды, водорода, реголита и другого. Идеальное решение — это железная дорога, но для Луны она нужна особенная. И у NASA есть идея на этот счёт. 
Источник изображения: NASA В NASA сообщили, что для Луны в рамках программы Robotic Lunar Surface Operations 2 (RLSO2) — роботизированные операции на лунной поверхности — создаётся роботизированная транспортная система необычного типа. Концепция лунной «железной дороги» носит название FLOAT (Flexible Levitation on a Track) или, по-русски, свободная левитация на треке. Разработка концепции FLOAT в целом завершена и работы перешли ко второй фазе, в ходе которой начнут прорабатываться критически важные элементы проекта. Трек или трасса FLOAT будет представлять собой гибкую трёхслойную ленту. Тем самым не нужно будет строить капитальные дороги и укладывать рельсы. Достаточно раскатать ленту из катушки в нужном месте и, в случае изменения маршрута, можно будет смотать её обратно и разместить в другом месте. За левитацию тележек для транспортировки грузов будет отвечать графитовый слой ленты. Он позволит воссоздать так называемую диамагнитную левитацию. Как раз недавно с подобной технологией добились успеха японские учёные. Второй слой будет управлять движением левитирующих тележек — их скоростью и направлением, для чего в слое будут реализованы необходимые схемы. Наконец, третий слой будет опциональным — это будут гибкие солнечные элементы, встроенные в ленту. Они будут вырабатывать электричество для транспортной сети и других нужд колонистов. Левитирующие тележки будут передвигаться без питания. Для диамагнитной левитации это возможно. Груз они будут перевозить сравнительно небольшой, но за сутки транспортная система сможет переправить с места на место до 100 т материалов со скоростью до 1,6 км/ч для каждой тележки. На втором этапе разработки системы FLOAT инженеры NASA создадут ряд масштабных прототипов транспортной сети вплоть до демонстрации на испытательном стенде с имитацией лунного ландшафта. Это позволит проверить ряд стратегий по подготовке площадок для развёртывания транспортной сети и, собственно, проверки самого развёртывания. Кроме того, прототип позволит оценить влияние внешней среды — температуры, радиации, зарядки, загрязнения лунным реголитом и прочее — на производительность и долговечность системы. Выявленные проблемы помогут сосредоточить усилия на решении технических задач, которых, наверняка, будет немало. Добавим, помимо специалистов NASA проблематикой лунной транспортной сети с недавнего времени занимается также компания Northrop Grumman. В марте 2024 года стало известно, что компания заключила контракт с DARPA на создание лунной «железной дороги». Зонд «Чанъэ-6» для первого в истории забора грунта с обратной стороны Луны вышел на орбиту спутника
09.05.2024 [10:56],
Геннадий Детинич
Вчера запущенный 3 мая китайский зонд «Чанъэ-6» затормозил у Луны и вышел на её орбиту. Этот манёвр стал решающим для миссии, хотя зонд ещё несколько раз будет корректировать орбиту для выхода на точку спуска на поверхность спутника. Миссия «Чанъэ-6» станет первой в истории земной космонавтики, когда пробы грунта будут возвращены на Землю с обратной стороны Луны, куда и спуститься не просто, не говоря о целом комплексе манёвров. 
Источник изображения: CCTV В состав зонда «Чанъэ-6» входит орбитальный, посадочный и возвращаемый модули. Посадочный и возвращаемый модули спустятся в районе Бассейна Южный полюс — Эйткен. Это крупнейший и древнейший в Солнечной системе ударный кратер, грунт из которого расскажет много интересного о строении Луны и истории нашей звёздной системы. Посадочный модуль будет брать пробы роботизированным ковшом и с помощью бура. Следить за работами на закрытой для связи с Землёй стороне Луны поможет выведенный ранее на её орбиту ретранслятор «Цюэцяо-2». В качестве вторичной научной нагрузки китайский посадочный модуль несёт четыре полезных нагрузки иностранного производства, установленных в рамках международного партнёрства — это французский детектор DORN для измерения концентрации газа радона и продуктов его распада на поверхности Луны, итальянский лазерный уголковый отражатель, анализатор отрицательных ионов NILS Европейского космического агентства и пакистанский спутник ICUBE-Q. Также на модуле размещены посадочная и панорамная камеры, прибор для спектрального анализа минералов и прибор для анализа структуры лунного грунта. Всего на проведение миссии «Чанъэ-6» отведено 53 дня. За это время будет совершено 11 манёвров, включая взлёт модуля с образцами грунта на орбиту Луны, стыковку с орбитальным модулем и возврат на Землю, где герметичная капсула с историческими образцами приземлится на севере Китая. «Роскосмос» запустил разработку ядерной энергоустановки для российско-китайской станции на Луне
08.05.2024 [12:39],
Анжелла Марина
Россия приступила к созданию ядерной энергоустановки для реализации совместных с Китаем планов по созданию научной лунной базы, запуск которой запланирован на 2033–2035 годы. Проект стал продолжением подписанного в марте 2021 года меморандума о взаимопонимании между странами. 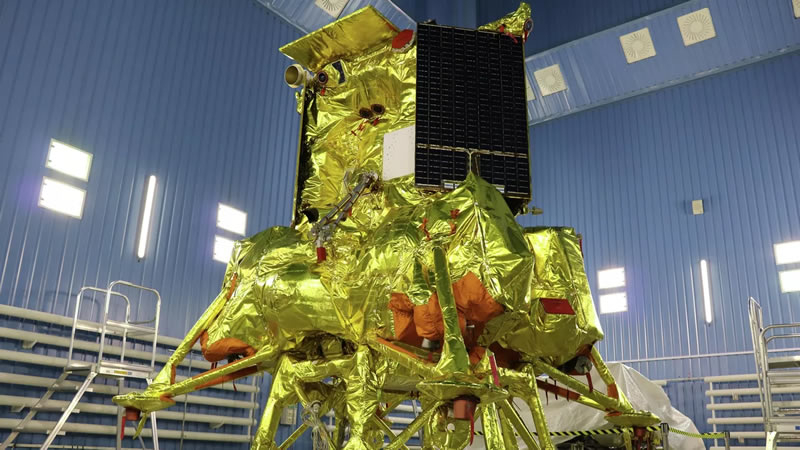
Источник изображения: «Роскосмос» Россия и Китай объединяют усилия в освоении космоса, несмотря на нарастающее противостояние с США. Как сообщил гендиректор «Роскосмоса» Юрий Борисов в интервью РИА Новости, данный проект осуществляется в рамках российско-китайского сотрудничества по созданию Международной научной лунной станции (МНЛС). Соглашение по МНЛС было подписано странами в марте 2021 года. МНЛС представляет собой комплекс научно-исследовательских инструментов для изучения Луны, проведения астрономических наблюдений, экспериментов и испытаний технологий для длительной автономной работы на поверхности спутника Земли. Планируется, что станция будет запущена в 2033-2035 годах. Однако планы двух держав по использованию ядерных технологий в космосе вызывают обеспокоенность США и их союзников. Недавно Россия заблокировала резолюцию ООН, инициированную США и Японией, о запрете размещения оружия массового поражения в космическом пространстве. В то же время российско-китайская поправка о полной демилитаризации космоса была отклонена голосами западных стран. Эксперты опасаются, что технологии мирного атома могут быть в дальнейшем использованы для создания ядерного оружия. Кроме того, США обвиняют Китай в разработке противоспутникового оружия и ведении испытаний в космосе. Вашингтон неоднократно призывал Пекин к переговорам по контролю над вооружениями, однако китайская сторона отвергает эти предложения. При этом МИД Китая заявляет, что именно США агрессивно наращивают военный потенциал в космосе, превращая его в арену боевых действий. Таким образом, несмотря на успешное российско-китайское сотрудничество в мирном освоении космоса, сохраняется высокий риск дальнейшей эскалации противостояния великих держав. А усилия по разоружению и демилитаризации космического пространства пока не приносят результата. Эксперты призывают страны проявлять сдержанность и избегать действий, которые могут быть истолкованы как угроза национальной безопасности. От этого зависит сохранение мира в космосе. Китай запустил зонд для доставки грунта с обратной стороны Луны
03.05.2024 [17:44],
Владимир Мироненко
В пятницу, 3 мая, Китай успешно запустил зонд «Чанъэ-6» (Chang'e-6), который в течение менее чем двух месяцев соберёт образцы грунта на обратной стороне Луны и доставит их на Землю. 
Источник изображения: russian.news.cn Как сообщило Китайское национальное космическое управление (China National Space Administration, CNSA), запуск ракеты-носителя «Чанчжэн-5 Y8» (Long March 5 Y8) с лунным зондом на борту состоялся с космодрома Вэньчан на побережье южно-китайской островной провинции Хайнань в 17:27 по пекинскому времени (12:27 мск). Через 37 минут после запуска произошло отделение второй ступени ракеты, отправившей «Чанъэ-6» на заданную переходную орбиту Земля-Луна с перигеем 200 км и апогеем около 380 тысяч км. После проведения серии манёвров зонд совершит посадку в кратере Бассейн Южный полюс — Эйткен на обратной стороне Луны, где он должен собрать образцы лунной породы весом 2 кг. Согласно планам CNSA, на миссию отведено 53 дня. Для осуществления связи зонда с Землёй будет использоваться запущенный прежде спутник-ретранслятор Queqiao-2, который позволит транслировать данные на наземные станции и обратно. «Чанъэ-6» состоит из орбитального модуля, возвращаемого аппарата, спускаемого аппарата и модуля для взлёта с Луны. Как сообщается, лунный зонд оснащён посадочной камерой, панорамной камерой, прибором для спектрального анализа минералов и прибором для анализа структуры лунного грунта. Добыча образцов лунного грунта будет выполняться с помощью буровой установки и роботизированного ковша. Также на борту зонда есть международная полезная нагрузка, включая французский детектор DORN для измерения концентрации газа радона и продуктов его распада на поверхности естественного спутника Земли, итальянский лазерный уголковый отражатель, анализатор отрицательных ионов NILS Европейского космического агентства и небольшой спутник ICUBE-Q из Пакистана. После завершения сбора образцы лунного грунта, запечатанные в контейнере, будут доставлены взлётным модулем на лунную орбиту, где он состыкуется с орбитальным аппаратом. После этого возвращаемый аппарат доставит образцы на Землю, совершив посадку на севере Китая, в автономном районе Внутренняя Монголия. Китай испытал связку из четырёх мощнейших ракетных двигателей, которые доставят тайконавтов на Луну
01.05.2024 [21:04],
Геннадий Детинич
В минувшие выходные на полигоне Тунчуань в северо-западной провинции Шэньси прошли статические огневые испытания счетверённых ракетных двигателей YF-100K. Инженеры хотели убедиться в их полной совместимости и индивидуальной надёжности. Двигатели подтвердили свои характеристики и теперь допущены к лётным испытаниям, которые ожидаются позже в текущем году, но в составе лунной ракеты они будут испытаны позже — не раньше 2027 года. 
Источник изображения: CASC Двигатель YF-100K является модернизированной версией двигателей YF-100, который используется в боковых ускорителях ракеты «Чанчжэн-5». Работает он на смеси керосин-кислород. Каждый YF-100K способен развивать тягу 130 т. Четвёрка двигателей, тем самым, развила тягу свыше 500 т, что подтвердил статический огневой тест в минувшее воскресенье. В Китайской корпорации аэрокосмической науки и технологий (CASC) не уточнили, для какой ракеты предназначена прошедшая испытание четвёрка YF-100K, однако раньше была информация, что CASC разрабатывает новую среднюю по грузоподъёмности ракету «Чанчжэн-12», первую ступень которой как раз должны приводить в движение четыре двигателя YF-100K. Испытания ракеты «Чанчжэн-12» должны пройти до конца 2024 года. Это ракета диаметром 3,8 м и высотой 59 м. Ракета сможет выводить 10 т полезной нагрузки на низкую околоземную орбиту и шесть тонн на солнечно-синхронную орбиту высотой 700 км. Вероятно, на «Чанчжэн-12» произойдёт обкатка двигателей и под неё также начнётся их производство. В состав первой ступени лунной ракеты «Чанчжэн-10», испытательный полёт которой ожидается в 2027 году, войдёт семь двигателей YF-100K и ещё по семь таких же двигателей будут установлены на пару боковых ускорителей. Ракета «Чанчжэн-10» высотой 92 м и диаметром 5 м сможет доставлять 70 т полезной нагрузки на низкую околоземную орбиту и 27 т на окололунную орбиту. Отправка тайконавтов на двух ракетах «Чанчжэн-10» ожидается к 2030 году. Одна из ракет доставит к Луне экипаж в корабле, а вторая — спускаемый лунный модуль. Но это будет уже другая история. В NASA рассчитывают испытать технологию космической дозаправки кораблей SpaceX Starship в 2025 году
30.04.2024 [12:30],
Геннадий Детинич
Хотя корабль Starship компании SpaceX ещё ни разу не взлетел без той или иной неудачи, именно он играет главную роль в планах NASA по возвращению на Луну, а также по покорению Марса. Важную роль в будущих миссиях будет играть дозаправка корабля на орбите. Роль танкера также будет отдана многоразовым Starship. Поэтому испытания по перекачке топлива с борта на борт в космосе станут самыми важными в ближайшие года. 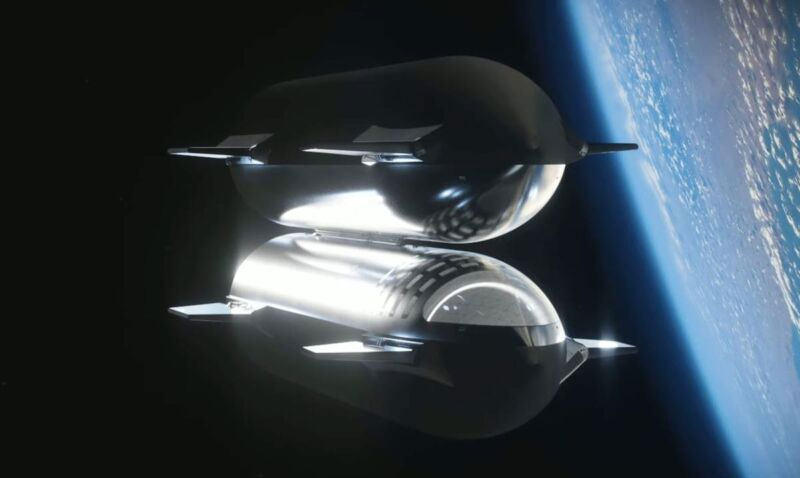
Источник изображений: SpaceX На днях глава программы NASA «Луна-Марс» Амит Кшатрия (Amit Kshatriya) пролил свет на основные шаги в сфере развития космической дозаправки компанией Starship. Первый небольшой эксперимент был проведён на борту корабля во время третьего тестового запуска Starship на орбитальную высоту 14 марта 2024 года. Криогенное топливо перекачивалось из одного бака в другой в условиях микрогравитации, когда корабль находился в верхней части траектории полёта. Данные по перекачке ещё анализируются специалистами, но в целом операция признана успешной. На орбите перекачка топлива по массе причин будет очень непростой процедурой. Топливо может располагаться в баках как угодно, вплоть до растекания по стенкам, поэтому, в частности, было решено отказаться от насосов. Переток будет идти за счёт перепада давления в баках, а также благодаря выверенным импульсам специальных ракетных двигателей, которые будут формировать объём топлива в баках. Также будут предусмотрены специальные баки для поддержания нужного давления в топливных баках. Компании SpaceX предстоит множество экспериментов, чтобы отладить операции с топливом. Значительной помехой процессу перекачки станет выкипание топлива. Чтобы снизить интенсивность выкипания, баки и трубопроводы придётся усиленно теплоизолировать и защищать от вакуума. Выкипание будет вести как к потере топлива, что означает лишние полёты танкеров, так и к повышению давления в баках, а это может нарушить весь процесс подачи топлива из одного бака в другой. Первые эксперименты на орбите помогут лучше понять и оценить эту проблему. По словам представителя NASA, первый опыт перекачки топлива на орбите с одного корабля Starship на другой состоится в 2025 году. Для этого на орбиту будут подняты два корабля с интервалом в несколько недель. Первый должен будет продержаться там до прилёта заправщика. Затем они автоматически сблизятся «животами» до соединения топливными портами — теми же самыми, через которые топливо закачивается в корабли на стартовой площадке на земле, после чего стартует процесс перекачки горючего. У компании SpaceX есть опыт автоматического сближения в космосе. Корабли Dragon успешно летают не первый год и стыкуются с МКС. Ту же систему датчиков и программное обеспечение можно использовать на Starship для сближения и стыковки перед заправкой. Но придётся учесть массу новых нюансов, например, топливо может начать плескаться в баках и полёт станет менее предсказуемым. Дозаправка на орбите выглядит сложной, признают в NASA, но это сразу работа на далёкую перспективу. Возможность дозаправки в космосе позволит заправлять корабли на лунных и марсианских орбитах. Компания Blue Origin, которая также получила контракт NASA на создание лунного посадочного модуля для доставки на её поверхность астронавтов, тоже разрабатывает систему дозаправки в космосе. 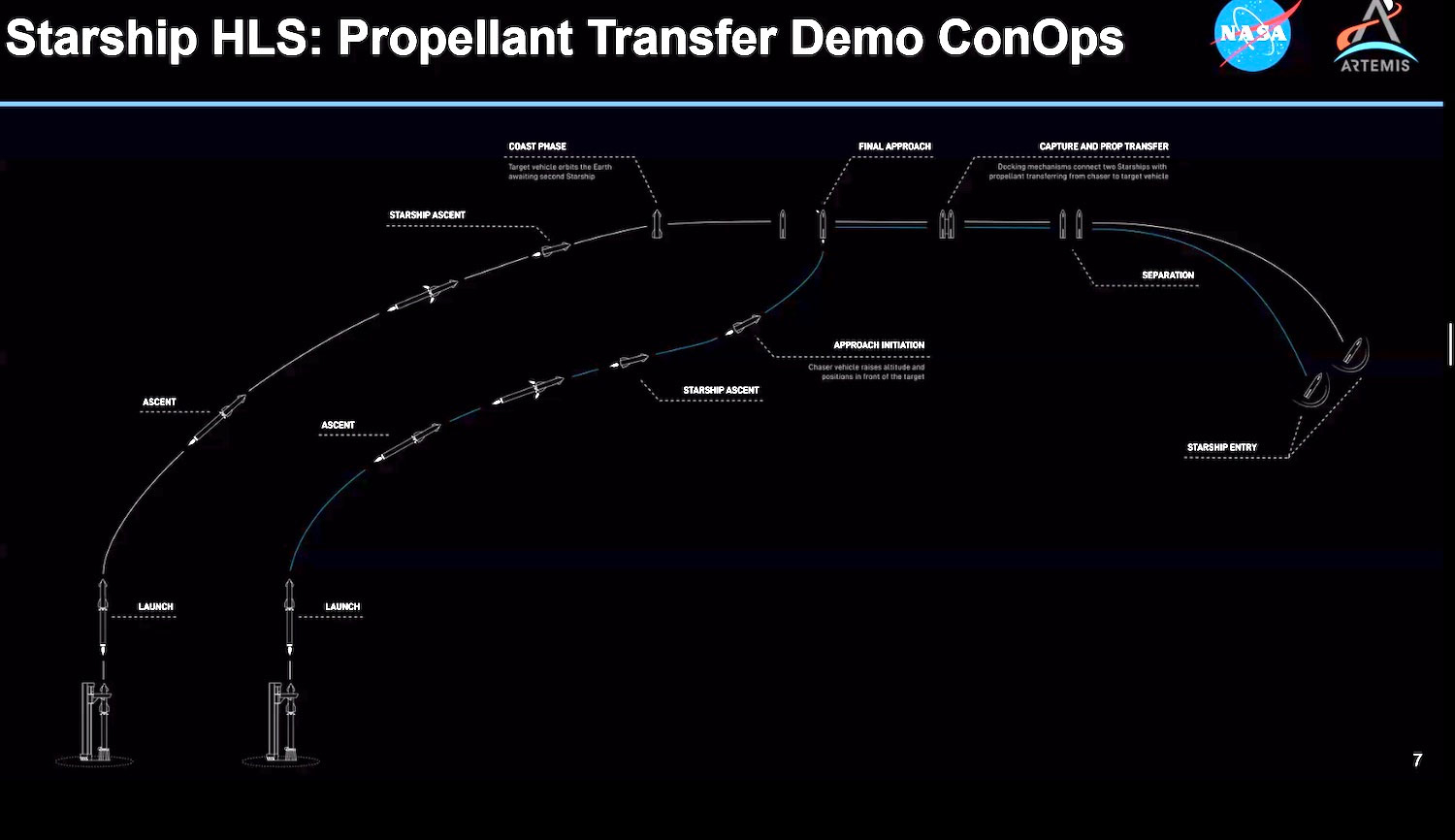 Можно не сомневаться, что дозаправка в космосе — это единственный в обозримом будущем механизм для обеспечения дальних и многоразовых полётов Starship. Единственное, что настораживает, это включение дозаправки в миссию «Artemis III» по возвращению американцев на Луну. Задержка с реализацией планов по обеспечению заправки на орбите автоматически задержит миссию по доставке человека на Луну впервые с 1972 года. К тому же, о регулярных полётах Starship речь тоже пока не идёт. Четвёртый тестовый запуск ожидается в конце мая и далеко не факт, что всё пройдёт гладко. На этой неделе Китай запустит зонд для сбора образцов грунта с обратной стороны Луны
29.04.2024 [16:04],
Владимир Мироненко
На этой неделе, как ожидается, Китай запустит лунный зонд «Чанъэ-6» (Chang'e-6) для сбора образцов грунта с обратной стороне Луны и доставки их на Землю. Китайское национальное космическое управление (CNSA) объявило в минувшую субботу, что зонд «Чанъэ-6» и ракета-носитель «Чанчжэн-5 Y8» (Long March 5 Y8) установлены на стартовой площадке космодрома Вэньчан в южно-китайской провинции Хайнань. 
Источник изображения: CCTV Лунный зонд «Чанъэ-6» и ракета-носитель «Чанчжэн-5 Y8» были доставлены на космодром в январе и марте соответственно. Перед запуском будет проведено их тестирование в сборке, а также заправка ракеты топливом. Это будет первая в истории человечества миссия по сбору образцов грунта с обратной стороны Луны и доставке их на Землю для дальнейшего изучения. В соответствии с планом, после выхода на лунную траекторию зонд «Чанъэ-6» совершит серию манёвров, после чего выполнит посадку в кратере Бассейн Южный полюс — Эйткен на обратной стороне Луны. Зонд должен собрать в кратере 2 кг образцов реголита. Напомним, что в ходе миссии «Чанъэ-5» в 2020 году было собрано и доставлено на Землю 1,731 кг лунного грунта. Как ожидается, анализ образцов позволит учёным лучше понять историю Луны, Земли и Солнечной системы. Поскольку зонд совершит посадку в местности с пересечённым рельефом за пределами прямой связи с Землей, для осуществления связи с лунным зондом, Китай в марте запустил спутник-ретранслятор Queqiao-2, который позволит транслировать данные на наземные станции и обратно. Этот спутник будет обеспечивать связь с Землёй в ходе беспилотных миссий «Чанъэ-7» и «Чанъэ-8» в 2026 и 2028 годах соответственно. В 2030 году, как ожидается, Китай отправит на Луну пилотируемую миссию. Китайские экспериментальные лунные навигационные спутники прислали фотографии обратной стороны Луны
19.04.2024 [22:23],
Геннадий Детинич
Запущенная в космос 19 марта пара китайских экспериментальных спутников «Тианду-1» (Tiandu-1) и «Тианду-2» (Tiandu-2) приступила к выполнению программы полёта. На спутниках находится оборудование для обеспечения связи и навигации рядом с Луной, за Луной и в пространстве между Луной и Землёй. В будущем ожидается интенсивное движение кораблей в этих областях пространства, а без надёжной навигации и связи это будет просто опасно. 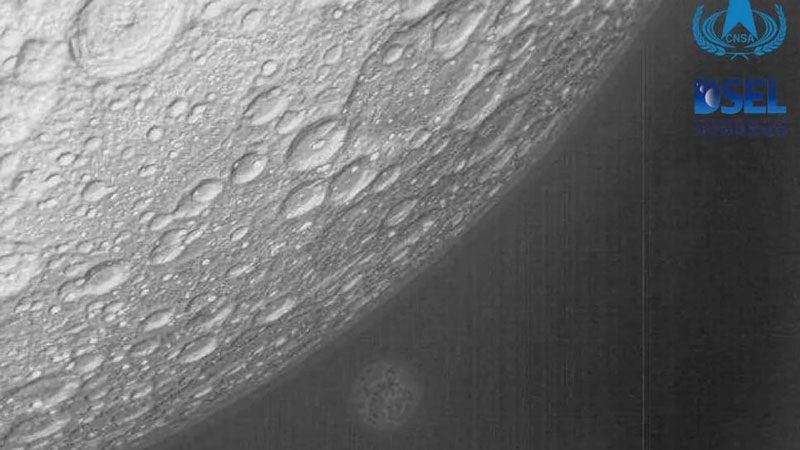
Переданный китайским аппаратом «Тианду-2» снимок обратной стороны Луны и попавшей в кадр Земли (в центре внизу) в дальнем инфракрасном диапазоне. Источник изображения: CNSA/DSEL Вскоре после запуска — 25 марта 2024 года — спустя примерно 112 часов полёта спутники успешно выполнили манёвр торможения на лунной орбите на высоте 209 км над поверхностью спутника. К 3 апреля они вышли на заданную лунную орбиту и следуют по ней на расстоянии около 200 км друг за другом. Больший из них — «Тианду-1» — весит 61 кг. На его борту двухчастотный коммуникатор Ka-диапазона, лазерный ретрорефлектор и «космический» маршрутизатор. Спутник «Тианду-2» весит 15 кг и оснащён устройствами связи и навигации. На днях Китайская лаборатория исследования дальнего космоса (DSEL) сообщила, что «Тианду-1» и «Тианду-2» провели испытания высоконадёжной передачи и маршрутизации между Землёй и поверхностью Луны. Подробности не сообщаются, но на обратной стороне Луны уже формально есть китайская лунная база в виде спускаемого модуля и лунохода. В качестве бонуса спутник «Тианду-2» поделился с ЦУП на Земле снимком обратной стороны Луны и попавшей в кадр Земли (в центре внизу) в дальнем инфракрасном диапазоне. Вместе со спутниками «Тианду-1» и «Тианду-2» в космос был выведен спутник-ретранслятор «Цюэцяо-2» (Queqiao-2). Он обеспечит мостик связи между спускаемой на обратную сторону Луны платформой «Чанъэ-6» и Землёй. Миссия «Чанъэ-6» должна стартовать в мае для первого в истории возврата на Землю образцов грунта с обратной стороны Луны. Но это будет уже другая история. NASA поручили разработать стандарт лунного времени
03.04.2024 [17:49],
Павел Котов
Белый дом накануне поручил NASA установить единый стандарт времени для Луны и других небесных тел — США стремятся установить международные нормы в космосе на фоне нарастающей лунной гонки между частными компаниями и государствами. 
Источник изображения: JB / pixabay.com Глава Управления научно-технической политики (OSTP) в администрации президента США Арати Прабхакар (Arati Prabhakar) поручила NASA совместно с другими американскими ведомствами к концу 2026 года разработать план по установлению координированного лунного времени (Coordinated Lunar Time — LTC), стало известно Reuters. Из-за разницы в гравитации и, возможно, из-за других факторов на Луне и других небесных телах время течёт не так, как на Земле. Поэтому LTC станет эталоном измерения времени для лунных космических кораблей и спутников, которым для выполнения миссий требуется предельная точность. В направленной OSTP записке говорится, что для человека на Луне земные часы отстают в среднем на 58,7 микросекунды за земные сутки и имеют прочие периодические отклонения, из-за которых разрыв земного и лунного времени ещё сильнее увеличивается. NASA в рамках программы Artemis намеревается в ближайшие годы отправить на Луну астронавтов и начать строительство лунной базы, которая поможет подготовиться к будущим миссиям на Марс. В проекте заняты десятки компаний и стран. Без единого стандарта времени будет непросто обеспечить безопасность передачи данных между космическими кораблями и обеспечить синхронизацию связи между Землёй, лунными спутниками и базами. Расхождения во времени могут привести к ошибкам в картографировании и определения местоположения на Луне или её орбите. На Земле большинство часов и часовых поясов ведёт отсчёт от всемирного координированного времени (UTC). Этот стандарт основан на сети атомных часов, расположенных по всему миру — они фиксируют изменения в состояниях атомов и генерируют среднее значение, которое и определяет точное время. Атомные часы потребуется установить и на Луне, считают в OSTP. По мере расширения коммерческой деятельности на Луну единый стандарт времени также будет иметь важное значение для координации операций, обеспечения надёжности транзакций и управления логистикой в лунной торговле. NASA протестировала полуавтономные разведывательные луноходы CADRE на «марсианском» полигоне
02.04.2024 [19:10],
Сергей Сурабекянц
NASA в рамках программы «Артемида» планирует заложить основы для долгосрочного присутствия человека на Луне. Для обеспечения этой инициативы агентство разрабатывает серию полуавтономных луноходов CADRE (Cooperative Autonomous Distributed Robotic Exploration). После испытаний инженерных прототипов NASA приступило к тестированию полномасштабных моделей на «марсианском» полигоне Лаборатории реактивного движения. 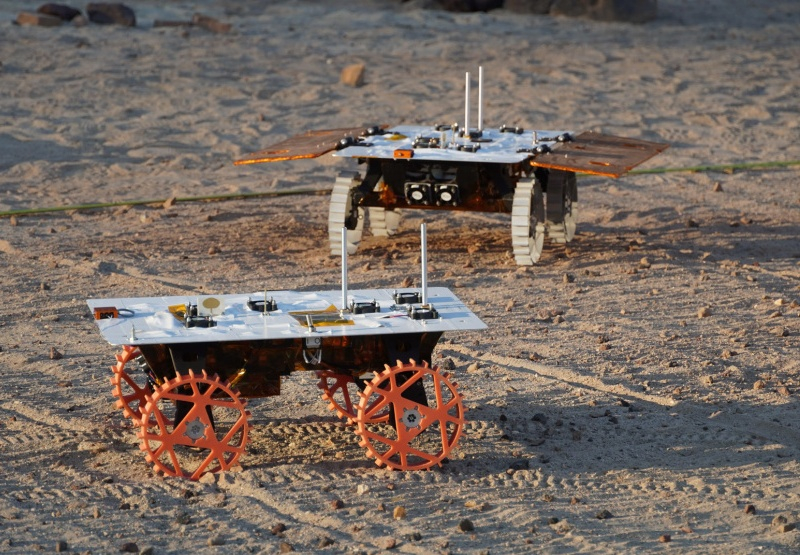
Источник изображений: NASA Компактные (размер лунного ровера сопоставим со скейтбордом) и относительно недорогие луноходы CADRE оснащены двумя стереокамерами, навигационными датчиками и георадарным модулем. В процессе работы они не требуют постоянного контроля из центра управления. Несколько луноходов CADRE используют для связи между собой сотовую сеть ближнего действия, что позволяет им координировать выполнение поставленной задачи без надзора человека. Именно способность автономного взаимодействия лунных роверов в настоящее время подвергается интенсивному тестированию на полигоне. В течение последних нескольких недель луноходы проходили суровые испытания на специально созданном полигоне, имитирующем поверхность Марса. Ранее на этой же площадке проходили тестирование марсоходы Curiosity, Perseverance и другие роботы, предназначенные для изучения красной планеты. Полигон представляет из себя песчаную площадку, усыпанную острыми камнями и является хорошим вызовом для любого робота, предназначенного для работы на других планетах.  При выполнении поставленной задачи луноходам CADRE не требуется участие человека для принятия каждого решения, им достаточно просто указать регион для исследования. Во время испытаний роверы успешно поддерживали связь между собой, грамотно распределяли задачи и «на лету» корректировали планы, столкнувшись с неожиданными препятствиями. Перед испытаниями на полигоне луноходы прошли тестирование в термовакуумной камере, чтобы гарантировать, что они смогут противостоять суровым лунным условиям.  Поскольку луноходы должны начать свою разведывательную деятельность до старта крупномасштабной миссии «Артемида», их доставку на поверхность спутника Земли планируется осуществить в рамках программы NASA Commercial Lunar Payload Services (CLPS), направленной на привлечение частных компаний к исследованию спутника Земли. На данный момент рассматривается возможность доставки роверов на Луну миссией Intuitive Machines IM-3 в 2025 году. NASA ожидает, что, в случае удачного прилунения, рой луноходов CADRE сможет проработать на поверхности Луны в течение одного лунного дня, примерно равного 14 земным. Главной целью эксперимента станет командная работа роверов по исследованию и картографированию вверенной территории. Каждый луноход может изучить около 400 м2 лунной поверхности. Координировать усилия луноходов поможет камера посадочного модуля с высоты 4 метра.  К сожалению, успех этой миссии не гарантирован. Последние попытки мягкого прилунения трудно назвать удачными. Посадочный модуль IM-1 компании Intuitive Machines опрокинулся при посадке. Такая же участь постигла и японский посадочный модуль SLIM. А спускаемый аппарат Peregrine вообще не смог достичь Луны из-за утечки топлива. Японский лунный модуль SLIM неожиданно пережил вторую ночь на Луне
29.03.2024 [12:05],
Геннадий Детинич
Японский посадочный модуль SLIM снова проснулся после длинной лунной ночи, хотя на это никто всерьёз не рассчитывал даже после первой ночёвки. Аппарат сделал снимок окружающей поверхности навигационной камерой и вскоре будет готов к постоянному общению с Землёй. 
Положение модуля SLIM на Луне после прилунения в представлении художника. Источник изображения: JAXA Как пояснила команда японских специалистов, посадочный модуль вышел на связь вечером 27 марта. Это второй раз, когда он пережил ночь на Луне, длительность которой равняется 14 земным суткам. В районе прилунения модуля температура ночью опускается до -130 °C, а в солнечный полдень повышается до 100 °C. Бортовое оборудование модуля не было защищено от охлаждения, что особенно грозило повредить аккумуляторы. И всё же, созданное японскими инженерами решение смогло выдержать суровые условия лунной ночи, уже дважды. Это наверняка пригодится для будущих миссий на Луну. Проверенные практикой проекты на дороге не валяются. 
Свежий снимок поверхности Луны камерой модуля SLIM После восстановления связи модуль подтвердил в целом работоспособное состояние, хотя сбои отмечены в модуле батарей и в ряде систем. При включении он был слишком горячий, чтобы начать полноценно работать уцелевшими системами и его на время оставили в покое. Миссия могла стать абсолютным успехом Национального космического агентства Японии, если бы SLIM совершил безаварийную посадку. Однако в процессе прилунения он потерял часть дюзы одного из двигателей и возросшая боковая скорость привела к опрокидыванию модуля после касания лунной поверхности. Фактически он сейчас стоит на голове, а в остальном он чувствует себя неплохо для платформы, которая должна была навсегда уснуть ещё два месяца назад. |
© 1997—2026 Электронное периодическое издание "3ДНьюс" | Свидетельство о регистрации СМИ Эл ФС 77-22224
выдано Федеральной Службой по надзору за соблюдением законодательства в сфере массовых коммуникаций и охране культурного наследия
При цитировании документа ссылка на сайт с указанием автора обязательна. Полное заимствование документа является
нарушением
российского и международного законодательства и возможно только с согласия редакции 3DNews.








 MWC 2018
MWC 2018 2018
2018 Computex
Computex



